基于RSSI测距修正和集员法节点定位算法
2018-03-16房亚群
房亚群,安 进
(江苏食品药品职业技术学院 信息工程系,江苏 淮安 223003)
0 引 言
依据在估计未知节点位置的过程中是否使用距离划分,现在的传感节点定位算法[1-4]可分为基于测距定位和基于非测距定位两类。后者属于粗粒度定位,难以满足高精度定位。而前者属高精度定位,但需要软件、硬件匹配,测量节点间的距离,即测距[5]。典型的基于测距算法有:接收信号强度RSSI、到达时间差TDOA和到达角度AOA到达角度AOA。相比TDOA和AOA算法,基于RSSI测距算法无需额外的硬件设备,由于其成本低、功耗小而被广泛应用。
基于RSSI测距是利用节点从发射点所接收的功率,并结合无线信道传输模型,推算离发射点的距离。然而,由于信号传输易遭受无线环境影响,包括多径、障碍物遮挡等,测量的RSSI值存在误差。为此,常需采取一些措施提高RSSI测量的精度。
测距和定位是基于测距定位算法的两个重要步骤,并且测距阶段对定位误差有直接的影响[6]。为此,研究人员对测距误差进行了较深入研究。如文献[7]提出多次测量加权RSSI值;文献[8]先分析信号传输模型,再估计环境参数,降低测量RSSI值的误差;文献[9]引用高斯加权策略,并将误差偏大的RSSI值滤除;文献[10]利用RSSI跳数连续改进测距精度。
为此,本文提出基于RSSI测距修正和集员法的节点定位算法(improved RSSI ranging and set membership based localization,I-RSSI-SM-L)。I-RSSI-SM-L算法以RSSI测距为基础,并充分考虑了RSSI测距误差以及定位开销。在测距阶段,通过锚节点间距离和接收功率信息,估计环境参数。然后,计算测距误差,并构建置信区间。最后,联合集员法和网格扫描法估计未知节点位置。
1 RSSI测距模型
为了降低测距复杂度,引用简易的对数正态模型表征信号传输信道,离发射点距离为d时,所接收的信号功率PR(d)
PR(d)=P+G-PL(d)
(1)
其中,P、G分别为发射功率、天线增益。而PL(d)表示信号经传输距离d时所产生的损耗。
利用参考节点,并利用参考距离和参考接收功率对式(1)进行变换,如式(2)所示
(2)
其中,PR(d0)表示离发射点距离为d0的接收功率强度,且d0为参考距离,通常取1m。而n为路径损耗因子,一般在2~4间取值。Xσ称为零均值的高斯变量。
现多数的基于RSSI测距算法,都是预前设定d0和PR(d0)的值,并且路径损耗因子n也是通过以往经验取值,并没有从真实的环境中估算这些参数值,这必然会加大测距误差,最终降低了定位精度。
2 改进后的RSSI测距模型
针对传统的RSSI测距存在的问题,进行改进。主要从路径损耗因子、测距修正两个方面进行改进,进而提高测距精度。
2.1 路径损耗因子n的修正
为了缩小路径损耗因子n对测距误差的影响,从实际环境中测量n,而不是预先设定n值。具体思路:周期地测量未知节点附近的锚节点间的RSSI值,再将这些值代入式(2),便可建立n与RSSI值的方程。然后,再通过这些方程,估计路径损耗因子n的值。
具体而言,假定未知节点i的附近,有3个锚节点,且分别为R1、R2以及R3。若锚节点R3离R1、R2的距离分别为d31、d32,相应地所接收的RSSI值分别为PR(d31)、PR(d32),再依据式(2)建立两个方程
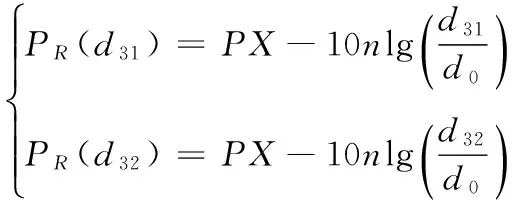
(3)
其中,PX=PR(d0)+Xσ。
将式(3)中的两个式子相减,可得
(4)

(5)
2.2 测距修正
尽管修正了路径损耗因子n,但在测距过程中仍不可避免地会产生误差。为此,进一步修正测距值。具体思路:先利用锚节点间的RSSI值估计它们间的距离,然后再计算它们间的真实距离,最后,计算这两个距离间的差值,即测距误差,这个误差反映了利用式(5)测距的不准确性。为此,将这个误差引入到测量未知节点与锚节点间的距离,并建立测距置信区间。
具体而言,若锚节点Rj到其它参考节点的真实距离为rjk,且k=1,2,…,n,k≠j,其中n为Rj的一跳邻居内的锚节点数。相应地,锚节点Rj到其它锚节点距离的估计值(利用式(4))表示为djk。因此,可计算rjk与djk间误差的均值
(6)
μj反映锚节点Rj周围环境的测距误差。由于μj反映了客观环境,那处于附近的未知节点与锚节点间的测距值也存在类似的误差。因此,将此误差引入到未知节点到锚节点间的测距中。

(7)

改进后的RSS测距过程以及与传统的RSS测距对比,如图1所示。
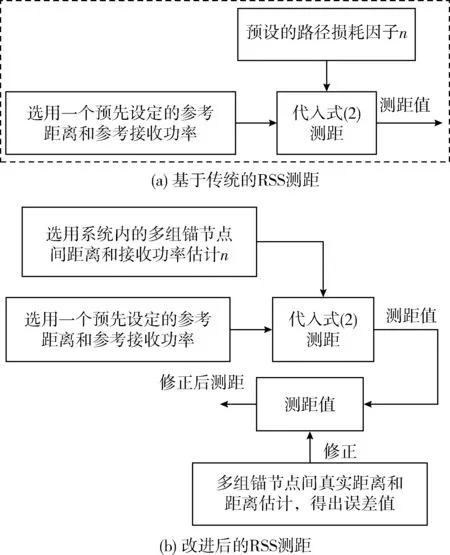
图1 测距模型比较
3 基于集员法的定位算法
考虑二维(2-D)网络,未知节点位置坐标为θ=[x,y]T,且θ∈2。通过m个锚节点估计未知的位置。第i个锚节点的位置分别表示αi=[xi,yi]T,且i=1,2,…,m。定位算法就是利用与锚节点间距离信息,估计θ的值,记为
I-RSSI-SM-L定位算法引用集员法估计未知节点位置。集员法常被用于处理非线性定位问题,其是在未知噪声但有界环境下估计未知节点位置。它所估计的未知节点位置不是一个点,而是一个集合。若样本数量足够大的话,集合元素也将趋近一个,即未知节点位置的估计值[11]。
首先,利用第3节所描述,先获取测距值,并构建测距的置信区间,这个区间反映了未知节点离锚节点间距离值的有效范围。因此,未知节点先选择离自己最近的3个锚节点,并分别构建3个置信区间,这个置信区间将构成交集,如图2所示。这3个置信区间的交集就是未知节点可能的位置。
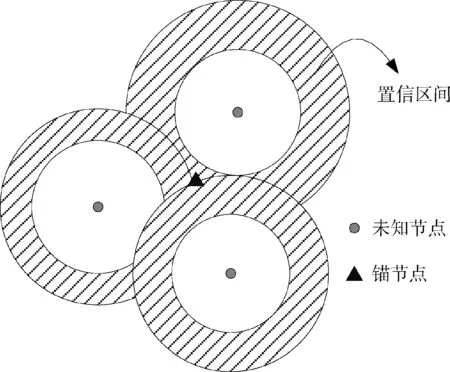
图2 置信区间
然后,需要进一步缩小这个交集。为了降低计算的复杂度,引用B-box法[12],利用方形边界代替圆形边界,如图3所示。
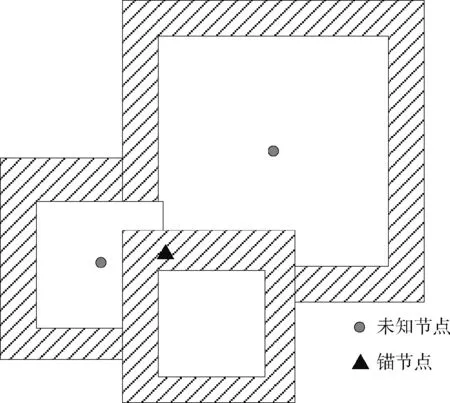
图3 方形边界可行解集
依据集合理论,两个区间的交集可定义为式(8)
(8)
然后,再通过集员法的辨识理论,估计未知节点位置的可行解集,如式(9)所示
(9)
再将集Θ内的解划分成m个独立正方形,即Θ={Ω1,Ω2,…,Ωm}。然后,求这个m个正方形的质心。Ωi的质心定义如式(10)所示
(10)
(11)
其中,aj表示锚节点的位置向量,而dj表示未知节点离锚节点的距离。
4 实验分析
利用MATLABR2012b建立仿真平台。本节进行两个实验。第一个实验分析测距误差,第二个实验分析定位误差。
4.1 测距误差分析
为了更好地分析I-RSSI-SM-L算法的测距性能,选择文献[9]所采用的高斯加权测距法和文献[10]所采用中值加权测距法,它们分别记为高斯加权、中值加权。高斯加权、中值加权测距法引用式(2)测距,并且n=2.7。
考虑在30m×30m的室内环境,并在此环境内部署7个锚节点,它们的位置分别为m1=(2,12)、m2=(4,10)、m3=(5,14)、m4=(8,4)、m5=(8,7)、m6=(9,14)以及m7=(10,11)。从这7个锚节点中随机选择一个节点,由该节点估计到其它锚节点间的距离。每次实验,独立重复10次,取均值作为最终的实验数据。
表1显示了测距结果,随机选择锚节点m5,各算法估计m5到其它锚节点间的距离。
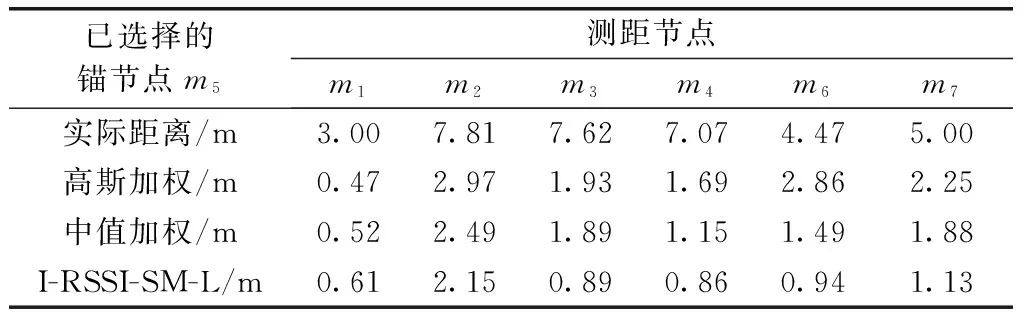
表1 测距偏差值
表1分析了这些测距的偏差值,从表1可知,在测量同一距离时,提出的I-RSSI-SM-L算法的测距偏差最小,而高斯加权测距偏差最大。例如,在测量离m6距离时,高斯加权测距算法的偏差达到2.86m,中值加权测距算法的偏差为1.49m,而I-RSSI-SM-L算法的偏差只有0.94m。
这3个算法的平均测距误差见表2,从表2可知,I-RSSI-SM-L算法的测距平均误差仅为1.0538m,比高斯加权的平均误差下降了24%,比中值加权算法下降了约40%。原因在于:I-RSSI-SM-L算法通过锚节点间的距离和接收功率信息,估计路径损耗因子,降低了测距误差。

表2 测距的平均误差
4.2 定位误差分析
本次实验分析I-RSSI-SM-L算法的定位误差。选用均均方定位误差(mean location error,MLE)作为性能指标。所谓MLE是指多次测量的Δθ的平均值,其中定位误差Δθ

(12)

在100m×100m区域内随机部署100个节点,其中锚节点数所占总节点数比例为p%。主要考查锚节点数、Xσ对MLE的性能影响。同时,选用基于RSS的加权质心定位算法进行同步实验,并与I-RSSI-SM-L算法的MLE进行比较。其中,基于RSS的加权质心定位算法记为RSSI+WCL。
4.2.1 锚节点数
假定Xσ为2dB,p%从20%到40%变化。实验数据如图4所示。
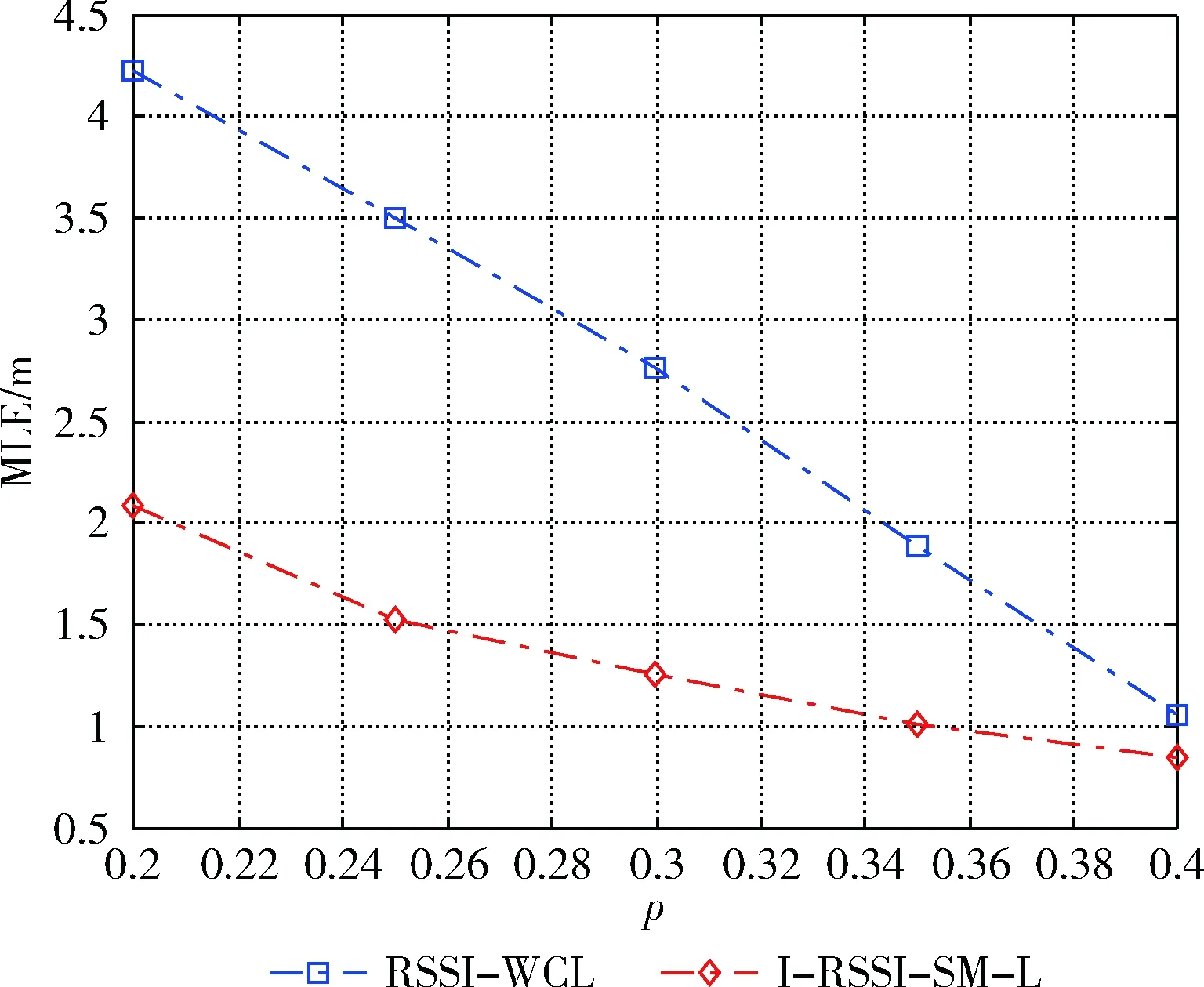
图4 锚节点数m对MLE的影响
从图4可知,比例p%的增加有利于MLE的下降。原因在于:区域内锚节点数越多,未知节点越能获取更多锚节点信息,提高了测距精度,缩小了测距的置信区间,进而提高了测距精度。相比于RSSI+WCL,提出的I-RSSI-SM-L定位算法有效地降低了MLE。这也充分说明,缩小测距误差和集员法能够降低定位误差。
4.2.2 噪声变量Xσ
本次实验考查p%=40%,Xσ从1.0至5变化。实验数据如图5所示。
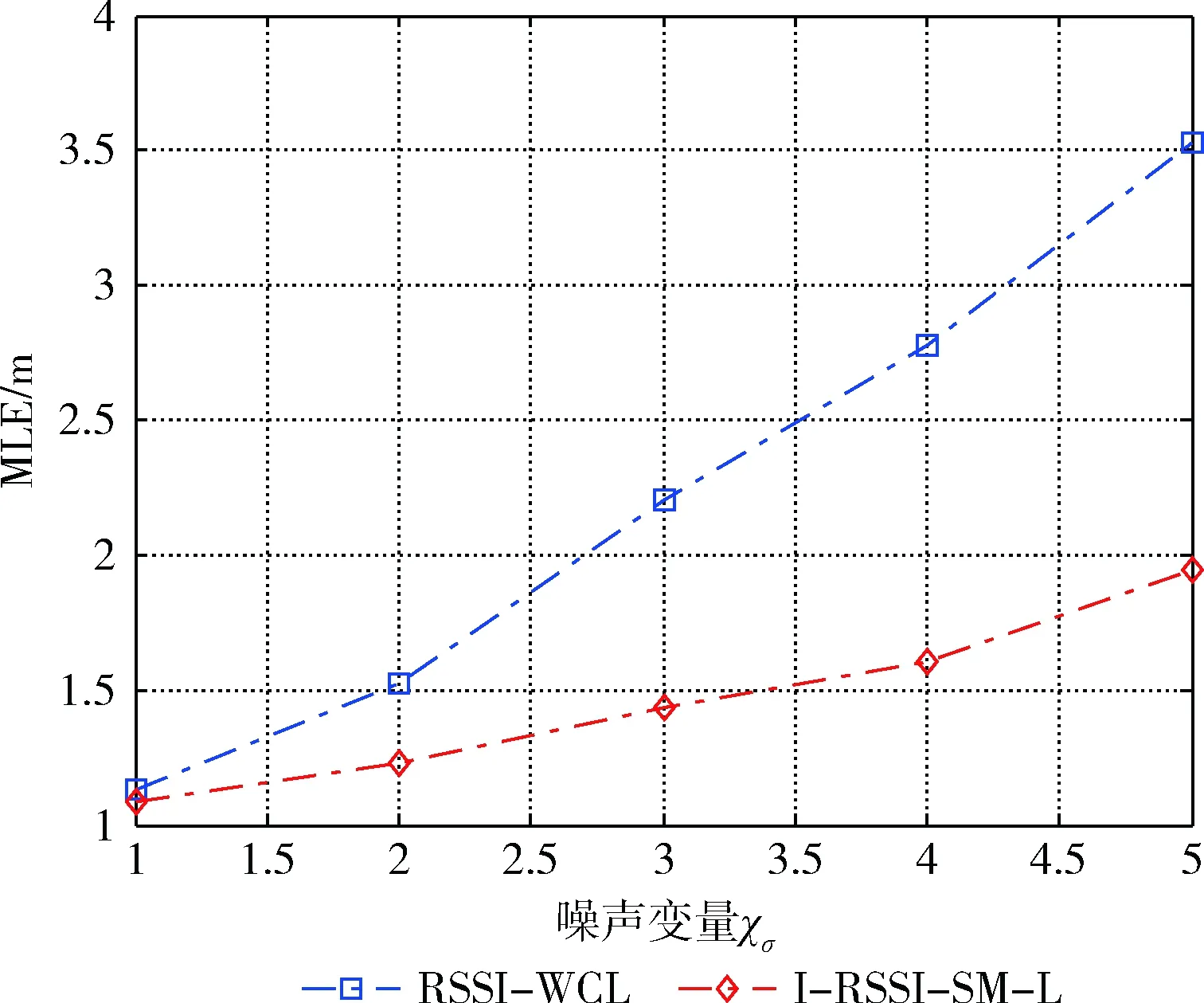
图5 噪声变量Xσ对MLE的影响
从图5可知,在噪声变量Xσ的变化区间,提出的I-RSSI-SM-L定位算法的MLE性能优于RSSI+WCL,平均提高了35%。并且随着Xσ的增加,提高的比例越明显。例如,在Xσ=3时,I-RSSI-SM-L算法的MLE为1.49,而RSSI+WCL的算法的MLE达到2.25。当Xσ增加至5时,I-RSSI-SM-L算法、RSSI+WCL算法的MLE分别上升为2、3.5。这充分说明I-RSSI-SM-L算法在恶劣环境中具有强的健壮性。
5 结束语
针对无线传感网络的节点定位问题,提出基于RSSI测距修正和集员法的节点定位算法I-RSSI-SM-L。I-RSSI-SM-L算法通过动态估计环境参数,降低测距误差,并构建测距置信区间,最后利用集员法估计未知节点的位置。实验数据表明,I-RSSI-SM-L算法的平均测距误差比高斯加权和中值加权分别下降了24%和40%。在定位精度方面也优于RSSI-WCL。后期,将优化算法,在提高定位精度的同时,降低算法复杂度。
[1]BulusuN,HeidemannJ,EstrinD.GPS-lesslowcostoutdoorlocalizationforverysmalldevices[J].IEEEPersonalCommunicationsMagazine,2012,7(5):28-34.
[2]PatwariN,HeroA,PerkinsM,etal.Relativelocationestimationinwirelesssensornetworks[J].IEEETransactionsonSignalProcessing,2013,51(8):2137-2148.
[3]XiaoQ,XiaoB,CaoJ,etal.Multihoprange-freelcalizationinanisotropicwirelesssensornetworks:Apattern-drivescheme[J].IEEETransMobileComput,2013,9(11):1592-1607.
[4]RaoSSN,KrishnaYS,RaoKN.Anellipticalroutingprotocolforwirelessmeshnetworks:Performanceanalysis[J].InternationalJournalofComputerApplications,2014,102(8):32-46.
[5]LIJuan,LIUYu,QIANZhihong,etal.ImprovedDV-Hoplocalizationalgorithmbasedontwocommunicationrangesforwirelesssensornetwork[J].JournalofJilinUniversity(EngineeringandTechnologyEdition),2014,44(2):502-508(inChinese).[李娟,刘禹,钱志鸿,等.基于双通信半径的传感器网络DV-Hop定位算法[J].吉林大学学报(工学版),2014,44(2):502-508.]
[6]FANGYucheng,WANGHongcheng,CUIShengli.WSNslocalizationalgorithmbasedonintervalanalysis[J].Transdu-cerandMicrosystemTechnologies,2016,35(4):141-148(inChinese).[方余丞,王洪诚,崔胜利.基于区间分析的WSNs定位算法[J].传感器与微系统,2016,35(4):141-148.]
[7]SHENDian,WENBin.WeightcentroidlocalizationalgorithmbasedonRSSI-distanceintervalmapping[J].ElectronicMea-
surementTechnology,2015,38(5):42-44(inChinese).[沈电,温斌.基于RSSI-距离区间映射的加权质心定位算法[J].电子测量技术,2015,38(5):42-44.]
[8]XuYM,ZhouJG,ZhangP.RSS-basedsourcelocalizationwhenpath-lossmodelparametersareunknown[J].IEEECommunicationsLetters,2014,18(6):1055-1058.
[9]LIYang,JINGXinxing,YANGHaiyan.Speechde-noisingmethodbasedonempiricalmodedecompositionandimprovedwaveletthreshold[J].ComputerEngineeringandDesign,2014,35(7):2462-2466(inChinese).[李洋,景新幸,杨海燕.基于改进小波阈值和EMD的语音去噪方法[J].计算机工程与设计,2014,35(7):2462-2466.]
[10]WUChunming,ZHANGJinqiang,JIAOLonglong.ImprovedDV-HoppositioningalgorithmusingcontinuoushopcountbasedonRSSI[J].JournalofChongqingUniversityofPostsandTelecommunications(NaturalScienceEdition),2015,27(2):184-189(inChinese).[邬春明,张金强,焦龙龙.基于RSSI跳数连续的DV-Hop改进算法[J].重庆邮电大学学报(自然科学版),2015,27(2):184-189.]
[11]SingKK,PandeyRK,SumanS.Contrastenhancementusingliftingwavelettransform[C]//InternationalConfe-renceonControl,Instrumentation,CommunicationandComputationalTechnologies,IEEE,2014:447-451.
[12]ZHANGXinrong,XIONGWeili,XUBaoguo.CooperativelocationalgorithmapplyingRSSImodelinwirelesssensornetwork[J].JournalofElectronicMeasurementandInstrumentation,2016,30(7):1008-1016(inChinese).[张新荣,熊伟丽,徐保国.采用RSSI模型的无线传感器网络协作定位算法[J].电子测量与仪器学报,2016,30(7):1008-1016.]
