基于Kinect的桌面型仿人双臂机器人设计★
2018-03-16陈佳文苏齐光
陈佳文,苏齐光,王 卓
(重庆大学,重庆 400044)
引言
机械臂是一款囊括了可执行结构的机械装置,存在的主要问题资源:其一,通常状况下,借助若干关节连接构成,结构相对精巧不易在短时间内掌握;其二,在加工过程中,零配件购置成本非常高,且部件打磨精度难以实现;其三,针对民用的机器臂少之又少,加之需要双臂操作就更加难得一见。
在现有的机械臂设计中,比较有代表性的是一款专利号为201620105515.2的机械臂。借助平行四边形和杠杆原理,以追求高稳定性和可靠性为目标,该方案将第一连接臂、第二连接臂、驱动第一连接臂和第二连接臂运动的驱动机构以及底座组件等部位的设计进行了有效的简化,大体上使其结构简单明了;但该方案的劣势也非常明显:其结构限制了工作自由度数量、工作范围十分有限、缺乏拟人型的基础、不适用于多用途民用机械臂的使用要求。
因此,本文以面向民用多用途为目标,借助微电机驱动提高了其运动灵活性能,设计为可视化的内部结构有利于多用途场景的机械臂二次开发,引进了开源控制系统代码有原则地避开了发明专利版权的限制,设计出一款囊括了双臂能力和双目视系统的双臂仿人机械臂。这种新的机械臂结构优化思路是一款使用简单、适用范围广的桌面级机械臂方案,使该技术从工业领域延伸到民用领域,在此基础上有力地增强了面向民用型拟人型机器人的工业化,延伸了面向民用型拟人型机器人的工业转民用水平,有效地改良面向民用型拟人型机器人结构[1]。
1 主要研究内容
1.1 机械臂机械传动结构设计
如图1所示,该图展示的是一款双臂机械臂的设计整体示意图。图中代码意义为:1、5、9是双臂机械臂的转动腰座部位,2、6是双臂机械臂的大臂部位,3、7是双臂机械臂的小臂部位,4、8是双臂机械臂的机械爪部位,10是双臂机械臂的底座和若干电机部位。该机械臂为开链11自由度结构,11个自由度包括转动腰座1、5、9的转动,大臂2、6的摆动,小臂3、7的摆动,机械爪4、8的转动和夹取。大臂2一端连接到转动腰座1,另一端连接到小臂3,小臂3末端连接机械爪。根据图3和图4机构运动简图,大臂和小臂分别由若干平行四边形结构组成,通过相关原动件转动带动大臂和小臂做相应的运动。
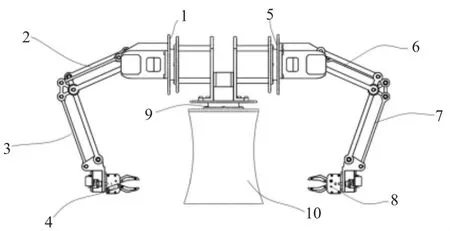
图1 双臂机械臂示意图
如下页图2所示,机架23通过两个螺丝固连于底座平面。根据平行四边形机构运动性质可知,由于杆件23//杆件24,杆件24、25在同一三角构件上,因此构件24、25相对角度不变;杆件24//杆件33,在原动件22转动的过程中,末端机构33相对地面的角度始终保持不变。本方案采用的末端保持结构弱化了六轴机械臂复杂的运动构造所带来的繁琐的运动控制过程,创造性地将大臂小臂之间的运动提取出来单独控制,达到了将结构化繁为简的目的。

图2 末端保持结构机械臂

图3 小臂设计示意图
如下页图3所示,在杆件23//杆件34作用下,原动件25与杆件34在平行四边形机构运动性质作用下具有了同角速度。与常见的六轴机械臂将大臂、小臂转动的电机置于自身关节部位相比,本机械臂结构优化思路下的机械臂控制大臂、小臂转动的电机置于转动腰部上方,较大程度地减轻了电机负担。在相同转矩条件下,本机械臂结构优化思路下的装置可以在抓取重量上限方面具有一定的优势[2]。
如图4所示,舵机41通过联轴器带动机械爪的转动,舵机42直接与机械爪的一指相连,在此基础上带动机械爪的夹取。

图4 舵机示意图
如图5所示,步进电机转轴与联轴器92固连,联轴器92又通过螺丝与底板93固连,底板93与转动腰部中间通过推力轴承91保证两者能相对转动。这样电机主轴保持相对静止,通过电机主体部分带动对称板件94转动,在此基础上实现腰部转动。转动腰部1、5与转动腰部9结构及原理一致。
1.2 嵌入式伺服控制系统设计
本文设计的面向民用型拟人型机器人采用ARM(有时也可以通用Arduino)控制器,通过嵌入式的方式完成控制系统的设计。为突破现有专利版权的限制,本设计思路有别于常规方案,借助了大量开源代码。通过视觉对目标位置的状态提供准确的判断,基于分层递阶控制的思想将双处理器应用于不同层次,分别实现双臂协同运动规划和双臂运动的实时控制。本文设计的面向民用型拟人型机器人的控制结构大体上包括两部分:一方面,处理器整体上采用的是ARM9(有时也可以通用Cortex M3);另一方面,在底层运动控制中,本设计采用的是Cortex M3或AVR微控制器作为辅助[3]。
1.3 Kinect视觉系统设计
应用Kinect体感设备来实现人机交互,从而达到仿人目的。体感设备Kinect有左、中、右三个镜头,中间镜头是RGB彩色摄影机,用来采集彩色图像;两边镜头则分别为红外线发射器和红外线CMOS摄影机所构成的3D结构光深度感应器,来采集深度数据,为实际意义上的“双目”。应用Kinect骨骼追踪技术,建立人体各个关节坐标,可实现追踪人体的20个关节的功能。控制流程为:Kinect与PC通过USB连接,由Kinect采集人体运动数据,机器人传感器信号采集使用基于STM32的I/O板卡,mini computer接收无线模块发过来的控制信息并执行相应指令,实现机器人全套动作控制。
2 本文机械臂结构优化思路的优势
双手臂机械臂自由度多达11个。特别是为了减轻机械臂末端的重量,机械臂的电机大体上设计在机械臂的肩关节与肘关节处,使得机械臂的机械结构精巧,对传动机构的构型与精度都要求较低。
双机械臂本身囊括了双机械臂协同工作特点,能实现更多的环境和工作需求。并且,改良后的结构囊括了仿人性,更有利于民用多用途应用环境的普遍应用与接收。
本文设计的面向民用型拟人型机器人设计有一款双臂协作的11自由度的桌面级机械臂方案,将常见的工业机器人技术转向面向民用型拟人型机器人领域应用,增强了面向民用型拟人型机器人的工业化,延伸了面向民用型拟人型机器人的工业转民用水平[4]。
本文设计的面向民用型拟人型机器人设计有开源的双臂双目机器人方案,在特定条件下可以打破现有双臂机器人的专利版权束缚,为多用途需求提供保障。
3 技术要点
为了使机械手臂能更加民用化,轻量化,本文设计的面向民用型拟人型机器人的微电机大体上安排在机械臂的肩关节与肘关节处,使得机械臂的机械结构精巧。在此基础上减少了能量损失,能以较小的体积完成更重的工作要求。
为了更加适用于民用多用途应用环境,本文设计的面向民用型拟人型机器人囊括了具有一定水准的仿人性,其囊括了双臂,双手,单腰结构,能普遍适用于各种民用环境。
4 结语
以设计一款面向多用途的民用桌面型仿人机器人为前提条件,本文设计了一款囊括了双臂型协同作业能力和视觉识别能力的双目双臂仿人机械臂。围绕其机械结构、控制系统、驱动及双目型视觉系统的主要研究内容包括三点:一是囊括了多传动方式、内部可见的双五自由度机械臂结构安排;二是双机械臂嵌入式控制系统及双臂协同控制技术研究;三是双目视觉系统安排与搭建。
[1]李贺立,杨冬,杨德志.双臂机器人避关节极限与避奇异位形改良研究[J].科学技术与工程,2017(3):98-104.
[2]张波,陈丹惠,陈俭.双臂机器人多功能欠驱动手爪的研制[J].产业与科技论坛,2017(1):69-70.
[3]周彤彤,刘更谦,李浩源.基于Kinect的双臂机器人动作模拟与轨迹规划[J].科学技术与工程,2017(7):58-62.
[4]倪文彬,杨伟超.一款双臂机器人离线运动规划方法研究[J].制造技术与机床,2017(4):5-28.
