基于红外信标的室内定位设计
2018-03-15姚万业魏立新
姚万业,魏立新,张 华
(华北电力大学 控制与计算机工程学院,河北 保定 071003)
近几年来,随着计算机网络技术、无线传感器技术的发展,社会的需求,室内定位技术在商场导购、餐厅服务等诸多领域中得到广泛应用,同时室内定位的研究也是国内外研究的热点.在过去的这些年里,对定位的研究主要使用的是GPS,RFID,超声波,蓝牙,WLAN等技术.然而,采用GPS定位多用于室外,对于室内环境,受障碍物及建筑物的影响,其定位精度下降严重.虽然用于室内定位的RFID,超声波,WLAN等技术可以提供从几米到几十厘米的定位精度[1].然而,射频系统对电磁感应敏感,在很多场合不能使用,有很大的局限性;另外依靠无线信号的定位系统,受电磁干扰影响,不能给予精确定位.
此外,现在有些科研人员提出了基于VLC(VisibleLight Communication)的室内定位技术,因为LED具有高速调制及响应时间短的特性,从而使得LED的应用从照明领域扩展到通信领域[2],常用的可见光定位技术主要是基于三角形法,该方法需要估计发射端和接收端的距离,而实现测距的方法有很多如接受信号强度(RSS)、到达时间(TOA)、到达时间差(TDOA)、到达角度(AOA)等[3].
可见光定位可以将其分为非成像定位技术和成像定位技术两种,在文献[4]中,吴楠,王旭东等人基于接收信号强度定位技术,提出一种利用多个LED发射端实现室内定位的方法,就是非成像定位技术中的一种;在文献[5]中利用LED照明阵列作为可见光通信(VLC)发送部分,从阵列中至少4个LED发射的三维坐标通过两个光学透镜被接收,然后由两个图像传感器解调信息,并使用图像传感器中接收到的LED图像的距离几何关系计算出目标的位置.在文献[6]中也有对成像定位技术的简单介绍.
然而这两种定位都有其缺陷.对于非成像定位的思想需要为每一个发光信标编码,同时要有相应的解码机制,制作成本高,另外不论是选择RSS、TOA、TDOA还是AOA中那种测距方法,其技术难度都是很大的,不易实现.而如果选择成像传感器定位,LED可见光又很容易受室内已有灯光和自然光的影响.
在文献[7]中,赵响,林基明针对室内可见光定位系统的参数优化问题,计算了基于成像传感器接收的接收机位置的估计理论极限,求出了估计量的克拉美罗下界.通过仿真实验,他们得出可见光与成像传感器结合可以实现精确的定位,定位精度为毫米级,定位误差的影响因子在于传感器距屋顶高度,透镜的焦距,成像传感器像素的大小,图像读取的帧速等.
成像定位技术在室内定位的研究中前景是好的.所以,在前人的研究基础上,提出一种基于红外信标的室内定位技术,首先在室内布置好已知坐标的红外发射装置,利用摄像头作为接收装置,通过STM32F407控制两自由度云台,使信标的像一直处于成像传感器的中心,而后通过测量云台的水平转角与垂直转角,计算出目标相对信标的实际位置.制作成本低,算法实现简单,适宜于餐厅,酒店等服务领域.
1 红外信标室内定位
红外信标的原理就是由有限个红外光源组成一个集合,通过改变集合中元素的数量或元素的排列方式,使得每一个光源集合对应一个唯一确定的位置信息,也就是编码.而后通过成像传感器接收到信标的信号,识别出对应的ID,获取信标的位置信息,然后通过目标与信标直接的空间位置关系求得目标的实际位置坐标.
1.1 红外成像
光包括可见光和不可见光,可见光就是我们通常所说的红、橙、黄、绿、青、蓝、紫这七种,其中红光的波长一般在600~750 nm范围内,波长超过750 nm小于1 000 μm的光就是红外光.同时,0.75~1.5 μm的光叫近红外光;1.5~4.0 μm的光叫中红外光;4.0~1 000 μm的叫远红外光.
虽然人眼无法感知红外光,但不管是CCD还是CMOS图像传感器可以感知所有的光.而常见CCD光谱响应曲线[8]见图1.从图中可以看到CCD传感器光谱响应范围从400~1 100 nm,如果不对成像传感器做一些处理的话,摄像机拍出来的照片和我们人眼看到的效果是有很大差别的.为解决这个问题,摄影师们通常会在摄像机的镜头前添加红外滤光片,过滤掉人眼不可见的红外光,使得图像传感器接收到的都是可见光.

图1 常见CCD光谱响应

图2 摄像头和滤光片
用同样的思路,在摄像机的镜头前添加一块滤光片,就可以把可见光过滤掉只剩下红外光,这样图像传感器所成的像就是红外成像.红外光成像就是将人眼不可见的红外线通过特殊的装置转换为可见或可测的信号.红外成像系统一般可以分为主动式和被动式两种[9].本文将采用主动式成像技术,使用可以产生940 nm近红外光的红外LED灯制作红外信标,同时在摄像机镜头前加上了940 nm的滤光片,见图2.通过这种方式使得成像传感器只能感知940纳米附近的红外光,而不会让可见光被成像传感器所接收.
1.2 信标的设计
所谓的信标(路标)就是指,目标通过所携带的传感器对外界环境进行感知而能够识别的特征信息.目标在移动的过程中,通过自身携带的传感器识别出环境中固定位置的信标,而后根据信标和目标之间的位置关系,在已知信标的位置情况下计算出目标的实际位置.
常见的信标根据信标与环境之间的关系,可以将信标分为自然信标和人工信标两种.自然信标是指本身就存在于环境当中的物体或者特征,如房间的墙角,顶棚的吊灯;人工信标就是在环境中人为的加入某物或某种特征,其目的就是为了完成目标的定位.
以往的信标设计多以简单的颜色或者数字作为路标图案[10].文献[11]以变电站巡检机器人为背景,提出了一种多元M序列的人工路标设置方法.该方法在尽可能减少路标种类的情况下,扩大路标的特征差异,从而提高定位对测量噪声的抗干扰能力.
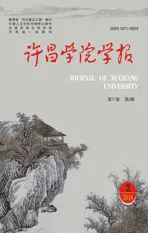
红外信标属于人工信标,作为人工信标起码需要满足两点要求:首先,信标易于识别,同时不同信标可以区分,每个信标都代表唯一不同的一个ID值;其次,每个信标需要提供几个特征值用于定位计算.在此基础上,本文提出用有限个红外LED组成一个集合,通过改变集合中元素的个数或元素的排列方式,使得每一个红外LED集合对应一个唯一确定的位置信息,如图3所示.图中A和B位置上的LED是信标提供的特征点,1,2,3位置上的红外LED灯可以任意改变,对于1,2,3每一个位置上,如果有红外LED表示1,没有表示0,这样就会产生23=8种结果,也就是说会有8种唯一与之对应的ID值.
使用图3的信标设计基本满足一般情况的室内定位需求,同时由A,B作为信标的位置特征,会很方便定位目标计算自身的实际坐标值,同时这种设计结构使得每个LED灯的距离最大,便于识别.本文设计的红外信标如图4所示.

图3 红外信标示意图 图4 红外信标实物图
1.3 红外信标定位原理
信标定位的方式在很早的时候就已经被提出,利用电感、电磁耦合及雷达反射传输特性的射频识别定位技术就可以看做是一种信标定位.在该定位系统中,将射频读写器放置在待测目标上,射频电子标签(信标)嵌入到室内环境中,电子标签上存储有位置识别的信息,读写器通过有线或无线形式连接到信息数据库[12].前文介绍路标可分为自然路标和人工路标,在文献[13]中,提出利用室内墙棱边与墙平面(Edge&Plane)做路标,在已知环境地图的前提下,当检测到某一墙棱边L与墙平面LM,通过待定位目标身上自带的测距传感器测出目标与墙棱边L的距离、与墙平面LM的距离,同时知道L的坐标,与它的夹角,就可以求得目标的实际坐标.文献[14]首先设计了一种抗干扰能力强,易于识别的人工路标,然后建立双目立体视觉系统,通过左右视觉传感器识别到路标,根据路标和传感器直接的空间位置关系,计算出待测目标的实际位置.
双目视觉在应用中算法复杂,成本较高,本文采用的是一种基于红外信标的室内定位,首先利用红外LED设计出人工路标,然后利用成像传感器识别这些红外信标.当识别到某一定位信标,通过待测目标上的云台移动使得当前信标的中心在成像传感器的中心成像,最后根据信标的空间坐标、云台转角求出待测目标的实际坐标.
首先让红外信标的中心的像落在图像的像素中心,也就是说第一步要使得定位平台识别出红外信标的ID,并且读取信标中心当前的像落在了图像的那个位置,而后计算出该位置到图像中心点的差值,通过PID后输出控制信号使得云台转动,最终让信标中心的像落在图像中心上.图5是信标通过滤光片在摄像机所成的像.根据信标的识别算法,很容易知道该信标的ID值和信标的中心坐标.信标的中心坐标值是根据图3中 A.、B圆心坐标的平均值获得,信标的ID值获得可以见表1,依据ID-Map可以得知当前信标的ID值,同时知道该信标代表的实际坐标值(X,Y,Z).
计算出信标像的中心值,之后控制云台使得这个中心可以落在图像的中心上.在该过程中,通过角度传感器将会测出云台上下两个电机的旋转角度,水平的角度传感器测得角度是水平电机以坐标轴X为0度角,旋转得到的角度,垂直的角度传感器测得角度是垂直电机以水平面为0度角旋转的角度,见图6.

图5 红外信标成像
LED个数LED位置(以下符号见图1-3)ID号2A,B13A,B,12A,B,23A,B,344A,B,1,25A,B,2,36A,B,1,375A,B,1,2,38
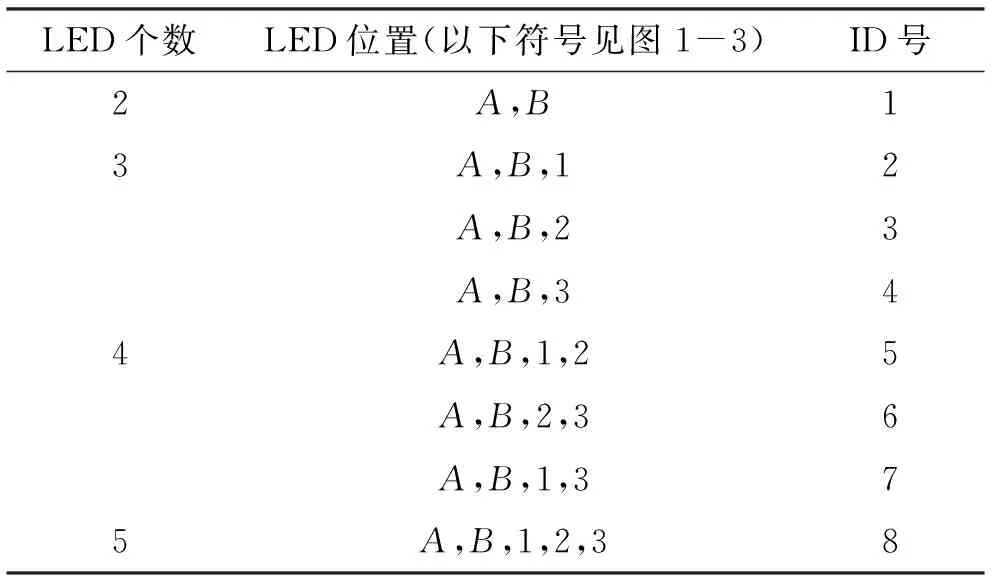
图6中a点是红外信标发射端,b点是信号接收端;A点是平面坐标的原点,AB线作为水平方向的基准线,垂直角度传感器测得的角度是以水平面为基准.根据平行线定理,图中角β就是水平角度传感器测得的角度,图中角α就是垂直角度传感器测得的角度.无论是理论上还是实际中,信标到水平面的垂直距离是不变的,图中h是一个定值.
(1)
由式(1)可知,X、Y、h都是已知的,只要测得α和β的值,就可以确定唯一的x和y的值.现如今传感器技术发展迅速,已经十分成熟,市面上常见的角度传感器精度可以达到12位以上,甚至有精度可以达到18位的角度传感器.就拿12位精度的角度传感器,其测量精度可以达到0.088度.所以很容易获得目标的实际坐标.
2 实验与结果
本次实验采用STM32作为控制器,同时有两个12位精度的角度传感器,两个步进电机和摄像头构成待测目标,红外信标作为信号发射装置.STM32上将连接蓝牙信号发射模块,每隔2秒STM32控制器向PC端发送一次定位信息.实验以300*300cm平面模拟室内面积,将红外信标装置固定在150cm的高度上,本实验使用了信标ID为8,规定红外信标的坐标为(0,0,150).本文定位平台见图7所示.
定位平台放在实验环境中,平台将会沿直线移动,每隔2s向PC端发送一个定位结果,测得数据和计算所得坐标值都通过串口打印,如图8所示.
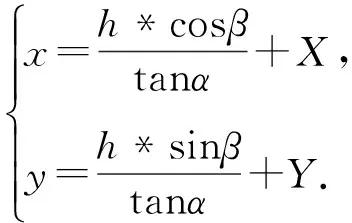
定位平台在模拟室内环境中,沿一条长300cm的直线移动,在移动的过程中每隔2s输出一次目标的当前位置坐标,图8是目标一次实验得到的数据,包含了15个数据点.使用MATLAB模拟该次定位,可以比较直观的观察到,定位系统的测量坐标偏移路径和实际坐标的情况,见图9所示.

图6 红外信标定位模型

图7 定位平台

图8 目标位置显示
图9 路径模拟
使用MATLAB对15个数据进行定量分析,横向最大偏移值是5.6cm,纵向最大偏移值是6.1cm,定位目标本次沿直线移动所得数据的均方差为2.68,也就是说该组实验数据离散度较小,数据的可靠性较高,满足实验前的预估.为了实验的准确性,在不改变定位路径的前提下一共测得25组数据,计算所测数据的均方差为3.73,本设计的定位精度在10cm范围内,满足大多数室内环境的定位需求,因此该设计方案是实用的.
3 结语
常见的室内定位方式,设计复杂,数据处理繁重,或者定位精度不高,实用性差.本文提出的基于红外信标的室内定位设计,不影响正常光照情况下日夜使用,设计简单易行,满足对定位精度要求不是很高的室内环境,尤其是适用于宾馆酒店地形简单的场所.对于本文提出的设计,在信标识别和云台设计方面可以改进,将会进一步提高系统的定位精度.
[1] 胡晴晴,王旭东,吴 楠.基于距离加权的室内可见光定位算法[J].光电工程,2015,42(5):82-87.
[2]OkadaH,IshizakiT,YamazatoT,etal.Erasurecodingforroad-to-vehiclevisiblelightcommunicationsystems[C].ConsumerCommunicationsandNETWORKINGConference.IEEE, 2011: 75-79.
[3] 张 倩.基于无线网络的高精度定位方法研究与实现[D].南京:东南大学,2010.
[4] 吴 楠,王旭东,胡晴晴,等.基于LED的高精度室内可见光定位方法[J].电子与信息学报,2015,37(3):728-732.
[5]DambulKD,O’BrienDC,FaulknerG.IndoorOpticalWirelessMIMOSystemWithanImagingReceiver[J].IEEEPhotonicsTechnologyLetters, 2011, 23(2): 97-99.
[6] 许银帆,黄星星,李荣玲,等.基于LED可见光通信的室内定位技术研究[J].中国照明电器,2014(4):125-128.
[7] 赵 响,林基明.室内可见光成像传感器定位系统的理论极限[J].西安电子科技大学学报:自然科学版,2016,43(4):64-68.
[8] 郭 阳,徐心和.在基于形状信息的视觉识别中颜色信息的应用[J].仪器仪表学报,2006,27(s1):758-759.
[9] 刘晓龙.基于被动式红外路标的移动机器人室内定位技术研究与嵌入式实现[D].北京:北京工业大学,2012.
[10]BriggsAJ,ScharsteinD,BraziunasD,etal.Mobilerobotnavigationusingself-similarlandmarks[C].IEEEInternationalConferenceonRoboticsandAutomation, 2000.Proceedings.ICRA.IEEE, 2000, 2: 1 428-1 434.
[11] 唐恒博,陈卫东,王景川.基于多元M序列的人工路标设置方法[J].机器人,2014,36(1):29-35.
[12] 赵嘉琦,迟 楠.室内LED可见光定位若干关键技术的比较研究[J].灯与照明,2015(1):34-41.
[13] 唐 琎,白 涛,蔡自兴.移动机器人的一种室内自然路标定位法[J].计算机工程与应用,2005,41(15):44-47.
[14] 刘振宇,姜 楠,张令涛.基于人工路标和立体视觉的移动机器人自定位[J].计算机工程与应用,2010,46(9):190-192.