基于三菱FX3U的立体车库模型控制系统设计
2018-03-15陈元招张洁平刘兴祥
陈元招, 张洁平, 刘兴祥
(闽西职业技术学院 信息与制造学院, 福建 龙岩 364021)
随着我国城镇化步伐加快以及人们生活水平的提高,城市人口不断增加,家庭汽车数量日益增多,市区停车已经成为当今社会的一道难题,特别是老城区中心地带的地下车库相对较少,原有布局的单层平面停车场已远远不能满足停车需求。为此,必须对原平面停车场进行改造或者新建自动化的升降横移式立体车库[1]。立体车库集机械构造、自动化控制及传感器检测等技术于一体,采用多层多区结构存放车辆,具有构造简单、投资小、面积利用率高、操作方便、停车速度快、运行稳定、安全可靠等优点,已逐渐成为今后城市停车的主导工程项目[2]。与以往的可编程控制器相比,三菱FX3U具有运算速率更快,可使用通讯口更多,可控制X、Y、Z三轴,扩展点数多等特点,非常适用于立体车库的控制[3]。本文从自动化控制的角度出发,在参考有关文献[4-5]的基础上研究基于三菱FX3U的立体车库模型控制系统,对软硬件进行设计,实现其快速停放车和取车的功能。
1 立体车库模型控制系统
以四层三区12车位的立体车库模型(见图1)为例,它包含机械传动部分、检测保护部分和控制部分。机械传动部分主要包括载车板、插杆、升降台、车位架、升降的步进电机、横移的直流电机等部件;检测保护部分主要由U型光电开关传感器(用于判断X、Y及Z三轴的位置并执行相应保护功能)、金属接近开关、微动开关等构成;控制部分主要由触摸屏、PLC、伺服驱动器、继电器等组成。
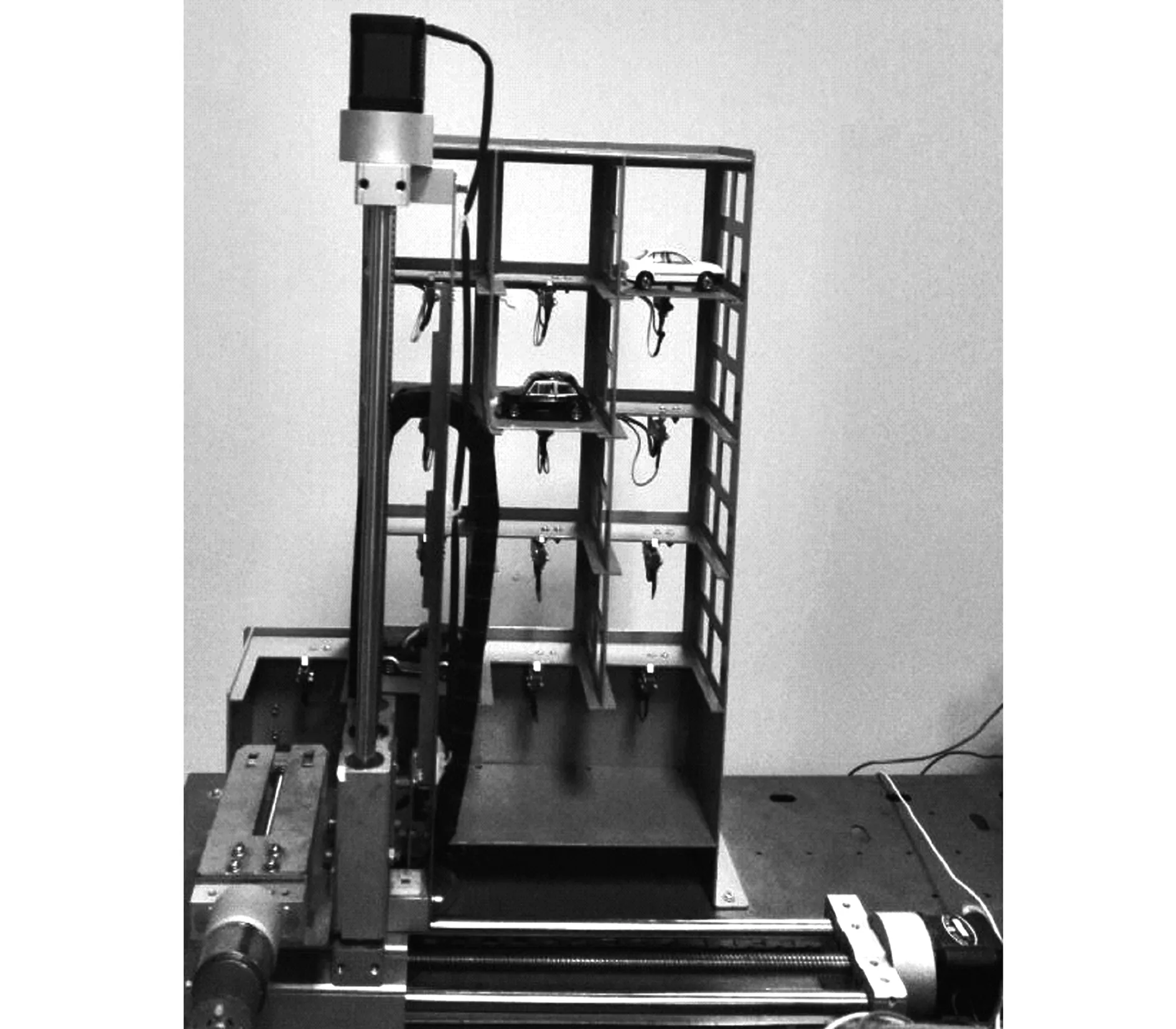
图1 立体车库模型
立体车库模型控制系统如图2所示。立体车库的最终控制对象是载车板。由三菱FX3U-32MR控制两台步进电机和一台直流电机。两台步进电机分别控制X轴的左右移动和Y轴的上下移动,直流电机控制Z轴的前后移动,形成载车板立体位置的变换。单个车位内车辆的取放操作由控制Z轴的直流电机与控制Y轴的步进电机配合完成,取放车时由系统控制载车板的插杆伸出与缩回。三菱FX3U-32MT与串联的微动开关配合,对立体车库的车位进行矩阵扫描,判断车位状况并确定存取车位置。操作人员在触摸屏上输入操作指令,系统经过程序判断和运算,输出脉冲和方向信号来控制步进电机与直流电机,控制载车板的插杆沿前后方向移动,自动实现车辆的入库和出库操作。
2 I/O口分配和硬件接线
2.1 I/O口分配
采用三菱FX3U-32MR控制立体车库的车辆取放操作,应根据立体车库操作的功能要求,对三菱FX3U-32MR的I/O口进行分配(见表1)。
2.2 硬件接线
该立体车库控制系统主要由两台三菱PLC控制,其中:FX3U-32MR控制车辆的出入库,其硬件接线如图3所示;FX3U-32MT实现立体车库的矩阵状态扫描,其PLC硬件接线如图4所示。
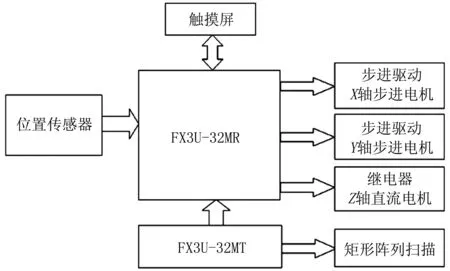
图2 立体车库模型控制系统表1 I/O口分配
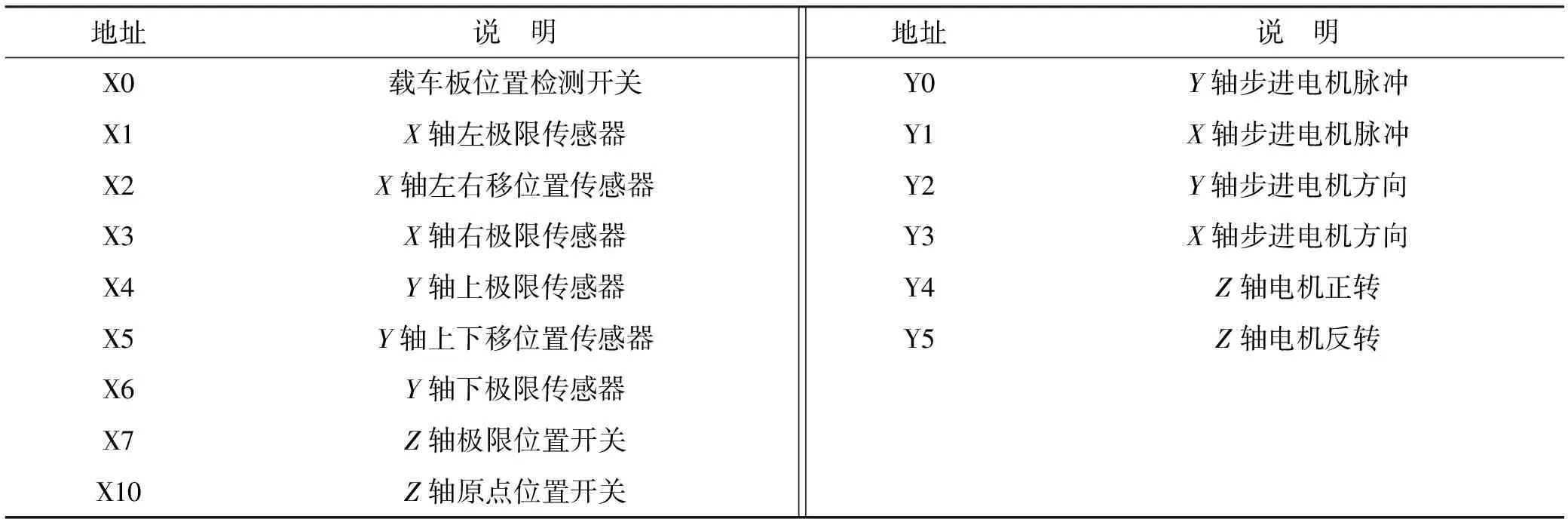
地址说 明X0载车板位置检测开关X1X轴左极限传感器X2X轴左右移位置传感器X3X轴右极限传感器X4Y轴上极限传感器X5Y轴上下移位置传感器X6Y轴下极限传感器X7Z轴极限位置开关X10Z轴原点位置开关地址说 明Y0Y轴步进电机脉冲Y1X轴步进电机脉冲Y2Y轴步进电机方向Y3X轴步进电机方向Y4Z轴电机正转Y5Z轴电机反转

图3 FX3U-32MR接线图
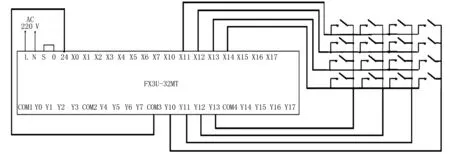
图4 FX3U-32MT矩阵扫描接线图
3 控制系统软件设计
该立体车库模型可在触摸屏的组态界面上选择手动调试和自动运行模式两种控制方式,进入自动运行模式可选择入库和出库操作。系统在入库运行状态时无法进入出库运行状态,出库运行状态时也无法进入入库运行状态,通过联锁控制来保障安全,防止故障发生。当选择自动运行模式时,控制系统进入正常的使用状态,即根据组态和PLC矩阵扫描位置判断车辆入库的位置或需出库的车辆并进行操作。当选择手动调试模式时,可选择单台电机进行反复调试,检测各台电机及线路是否正常工作,也可以判断各传感器是否已损坏或存在位置检测不到的情况。同时,在自动运行模式出现异常时,可切换到手动调试,实现车辆的手动入库和出库操作。
3.1 入库操作
当控制系统通电后,PLC对组态及各单元进行通信检测判断,确定通信正常后,X轴、Y轴及Z轴回到各自原点。此时,若立体车库中有空位,则可进行入库操作。入库操作流程如图5所示。当立体车库中没有空位时,系统显示车库已满,入库按钮失效,无法完成入库操作。立体车库中还有空位时,在组态界面点击入库按钮,系统首先判断进出口位置是否有车,若有车,载车板靠近进出口进行取车;当载车板上检测有车且Z轴收回原点时,在组态选择一个空位,由U型光电开关传感器与系统配合进行行列位置判断,PLC发出脉冲和方向信号,使控制X轴的电机与控制Y轴的电机转动,载车板把车辆移到选定的位置停放。车辆停放到位后,系统通过矩阵扫描会检测到该位置有车,组态在相应的位置也显示出该位置有车。入库操作结束后,各轴回各自原点。Z轴优先回原点,然后X轴和Y轴再回原点,以保证控制系统的安全性。
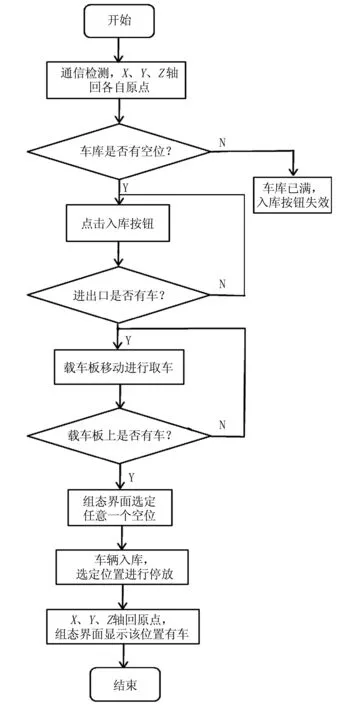
图5 入库操作流程
3.2 出库操作
从立体车库取车时,系统通过矩阵扫描检测车库各位置是否有车,并在组态界面显示。在指定位置界面显示有车,载车板上和进出库位置均无车时,出库操作系统正常工作,在组态界面上选定位置进行出库操作。出库操作流程如图6所示。当组态界面上选定某个位置的车辆后,首先判断X轴、Y轴及Z轴是否在原点位置,如果不在原点位置,要进行回原点矫正;然后判断载车板上是否有车,如果载车板上无车,再判断进出库位置是否有车,若确定无车,则X轴、Y轴移动到组态界面选定取车的位置后进行取车,最后送至进出库位置。出库操作结束后,X轴、Y轴及Z轴回各自原点。车辆取出后,系统的矩阵扫描将扫描不到该位置有车,组态界面则显示该位置无车辆停放。在出库操作中,若组态界面上选定某个位置的车辆后,载车板上有车或进出库位置有车,系统则停止出库操作且在组态界面上发出警告。系统如果在取车过程中突然检测到进出库位置有杂物或人,就会进入急停状态,即所有操作全部停止,以避免人员伤亡或财产损失。
3.3 PLC主要程序
主、从站通信PLC程序梯形图如图7所示。本文通过RS485实现立体车库控制系统两台PLC的通信连接, 将FX3U-32MR设为主站,FX3U-32MT设为从站,它们之间的信号传送通过PLC程序实现。该立体车库控制模型的入库和出库操作系统主要对车库的12个位置进行判断。入库操作的位置判断程序梯形图如图8所示。
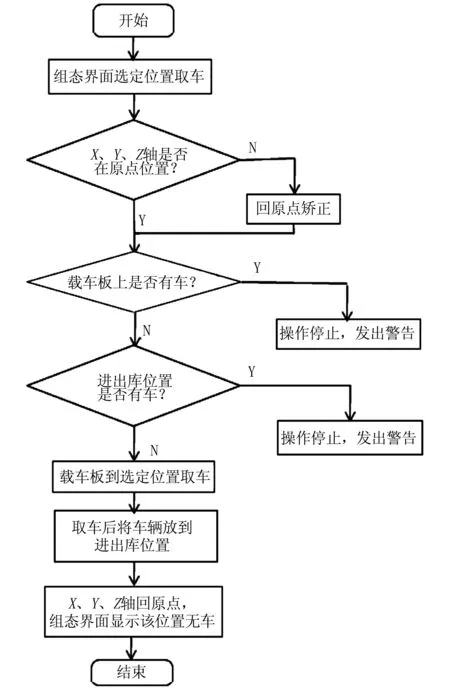
图6 出库操作流程
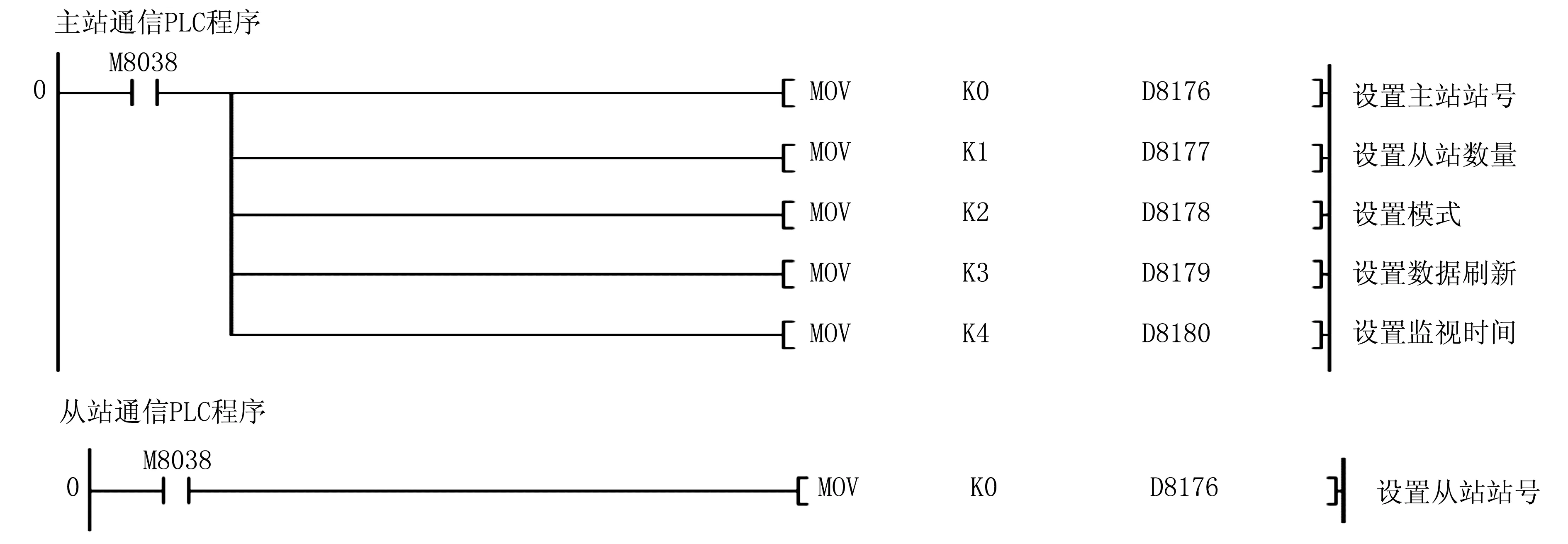
图7 主、从站通信PLC程序梯形图
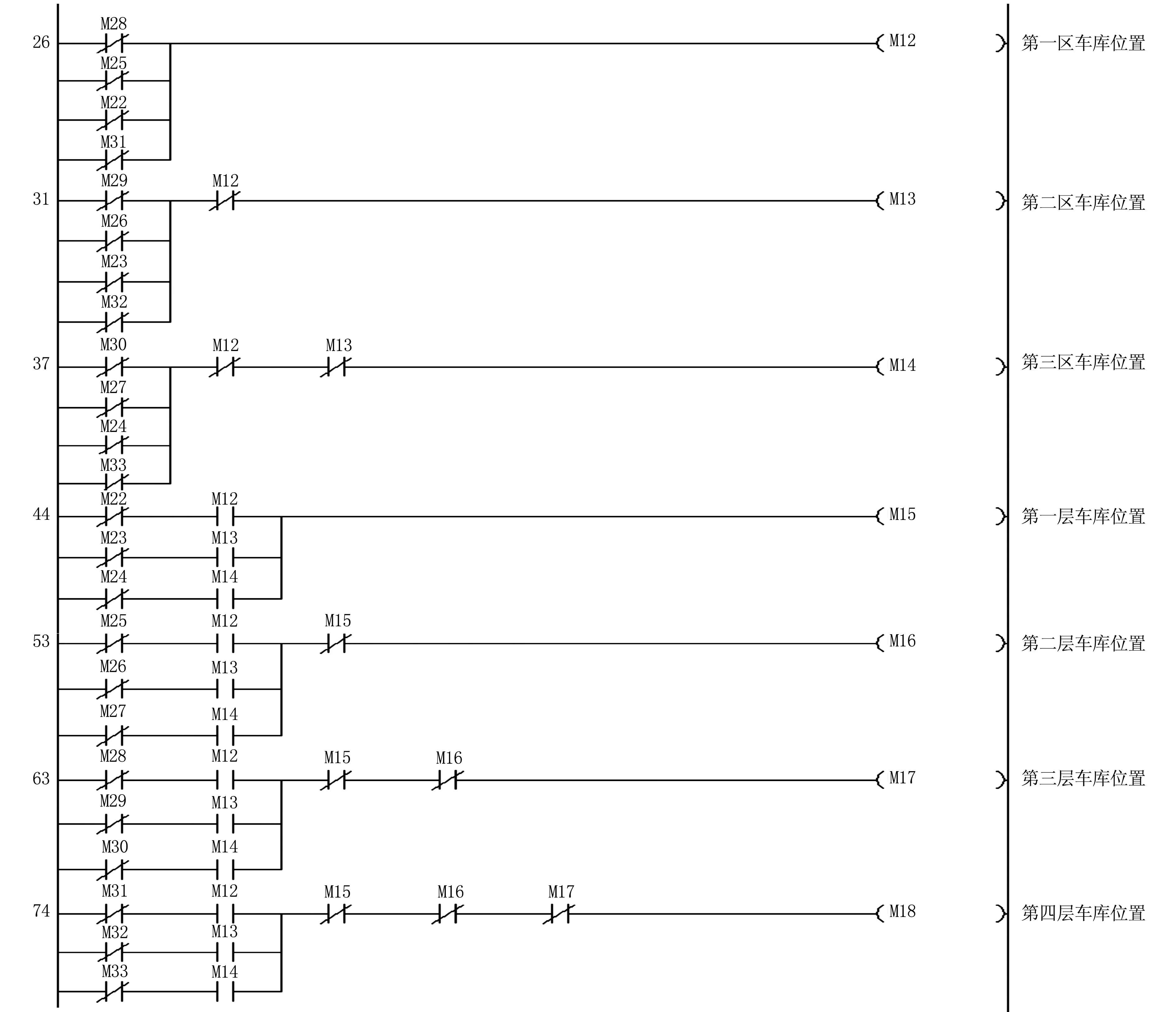
图8 入库操作位置判断程序梯形图
4 组态界面设计
立体车库模型控制系统选用TPC7062Ti新型触摸屏作为人机交互界面,完成车辆的入库和出库操作以及立体车库停放情况的实时监视。在监视与控制通用系统(Monitor and Control Generated System,MCGS)设备窗口中首先添加一个通用串口父设备0,在父设备下面创建一个子设备0(三菱FX系列编程口);然后设置子设备PLC的属性,进行通道连接操作;最后将相应通道与MCGS实时数据库中的变量相连,对PLC的输入输出地址进行读写,实现外部信号的输入和PLC的输出。
在车辆需要入库A11(第1层第1区)而进行操作,且表达式(m022=1)存在时,对应图符可见,且界面显示“有”;进行车辆出库A11(第1层第1区)操作,且表达式(m022=1and m111=0)存在时,按钮可见,且界面显示“取”,同时显示该框的操作属性,数据对象值操作设为按1松0的m131,然后点击该按钮,可进行出库操作。在立体车库模型中共有12个位置,按照A11-A12-A13-A21-…A42-A43的顺序加1进行设置。MCGS组态界面设置如图9所示。
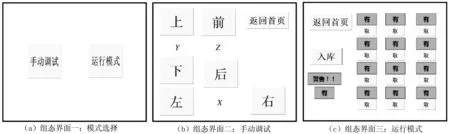
图9 MCGS组态界面
5 出入库操作注意事项
(1)回原点。为了防止载车板碰撞出车架构而导致损坏,必须规定X轴、Y轴及Z轴回原点的顺序,即Z轴优先回原点,然后X轴和Y轴才能回原点。X轴和Y轴回原点可以矫正X轴、Y轴的位置(行与列)。立体车库模型控制系统需以原点为基准进行控制,行与列的位置通过传感器进行判断。比如,控制X轴的电机正转,底部的U型光电开关传感器检测到两个列的光尺缺口,则载车板向左位移两列;若控制X轴的电机反转则载车板向右位移两列。
(2)取车。载车板的取车与放车由Z轴与Y轴配合完成。假设载车板到了选定的位置进行取车,则控制Z轴的直流电机正转,载车板的插杆伸入车辆底部,控制Y轴的步进电机正转4圈,向上移动将车抬起,Z轴回原点,然后,载车板把车辆送至进出库位置。
(3)放车。放车操作与取车操作过程相反,当X轴、Y轴到达选定的车库空位时,控制Y轴的电机先正转4圈,向上抬高,此时车辆比该位置高一些,控制Z轴的直流电机正转,将载车板的插杆伸出,到达位置后,控制Y轴的电机反转8圈,载车板向下移动,车辆被放入选定的库位,最后,Z轴回原点,等待下一步操作。
6 结 语
立体车库模型采用三菱FX3U系列PLC与新型触摸屏为主体的控制系统,整体工作效率高,运行性能安全可靠,控制过程自动化、可视化,减少了操作人员的工作量。实际停车场立体车库按此设计,可很好地解决城市“停车难”和“停取车速度慢”的问题。
[1] 王虎军,马殷元.基于PLC的垂直升降式立体车库控制系统设计[J].重庆科技学院学报,2016,18(1):82-84.
[2] 张桂香,耿长清.基于PLC的升降横移式立体车库自动控制[J].自动化仪表,2013,34(7):35-37.
[3] 刘伟,张廷林,董小伟,等.基于PLC的立体车库自动控制系统的设计[J].起重运输机械,2013(12):20-22.
[4] 王海周,李仁旺,宋圣涛,等.基于PLC的升降横移式立体车库控制系统设计[J].成组技术与生产现代化,2016,33(2):1-5.
[5] 易倩颖,叶云岳,郑灼.基于PLC的新型垂直提升式立体车库控制系统设计[J].机电工程,2012,29(4):409-412.
