光电跟踪仪的室内测评方法研究
2018-03-15冯建华李连学
冯建华, 李连学
(中国电子科技集团公司第二十七研究所, 河南 郑州 450047)
光电跟踪仪是火力控制系统的探测设备,主要用于探测、捕获并跟踪目标,测定目标的方位角、高低角和距离,为火炮射击、导弹制导、光电对抗等提供目标的精确位置。其性能指标包括作用距离、跟踪精度、测距精度、保精度最大角跟踪速度/加速度、环境适应性等[1-2]。此外,还有一些指标能够更好地反映光电跟踪仪的战术能力,其技术实现方法是多样和隐性的,较难对其进行准确的室内仿真、测试和比对,而室外测试的成本高、场地受限。本文针对这些问题展开研究,提出抗复杂背景能力、远距离跟踪能力、自主捕获能力、图像处理时延4项重要指标的室内测试方法,定量地评价和比对不同光电跟踪仪的综合性能。
1 室内测试原理
光电跟踪仪的测试包括场景选择、光电跟踪仪参数设置、测试流程设计等。室内测试采用视频仿真技术[3-4]是有效的方案,其测试原理如图1所示。利用计算机生成基于海、陆、空、天背景的仿真视频,通过投影仪将其投射到屏幕上。仿真视频的优势在于其内容丰富、样式多变,既能仿真不同的天空背景,也可仿真不同的海面和地面背景。室内测试光电跟踪仪需要对屏幕上的图像进行图像采集、处理和跟踪,既测试图像跟踪处理算法的水平,又测试图像跟踪与其伺服系统的匹配能力。
1.1 背景图像的产生
视频仿真是通过外场的图像采集存储和计算加工来实现的。视频仿真既可模拟复杂背景,又能够模拟远/近距离、灰度可变的目标。

图1 光电跟踪仪室内测试原理
复杂背景的视频仿真可分为3种情况:第一种,模拟地面背景,包括地面植被、地形地貌、建筑物、地平线等;第二种,模拟海面背景,包括海浪、水天线等;第三种,模拟空中背景,包括云、辐亮度不均匀的天空等。
1.2 目标图像的产生
目标分为小目标和大目标。目标图像的产生有两种情况:第一种,用小目标图像模拟远距离的目标,在视频图像中目标尺寸占整幅图像的比例较小,模拟空中目标时应不大于(5×5)像素,模拟地面、海面目标时应不大于(7×7)像素;第二种,用大目标图像模拟近距离的目标,在视频图像中目标尺寸占整幅图像的比例比较大,模拟空中目标时应不小于水平、垂直视场的1/4区域。在产生的图像中,目标的对比度、运动速度、运动轨迹应可以设置和计量,以便定量测试和比对光电跟踪仪的抗复杂背景能力。
对光电跟踪仪某些指标的检测也可以使用简单的光源作为模拟目标。
2 室内测试方法
2.1 抗复杂背景能力测试
测试光电跟踪仪的抗复杂背景能力就是测试其分别在地面、海面、天空背景下,稳定跟踪目标时的最小对比度。对于室内测试来说,目标的距离比较近、红外特性不明显,因此测试时可采用电视摄像头作为图像传感器,同时将视频信号输送给电视跟踪器和红外跟踪器。另外,调整光电跟踪仪与投影屏幕的距离以及摄像头的焦距,使图像中不再出现屏幕以外的其他背景。
测试步骤为:第一步,针对目标静止时进行测试;第二步,针对目标以不同速度运动时进行测试。
测试时,分别设置不同对比度(量值从15%到3%)的目标。在相同的条件下,光电跟踪仪稳定跟踪目标时所测得的最小对比度越小,表示其抗复杂背景能力越强。
2.2 远距离跟踪能力测试
远距离跟踪能力是指光电跟踪仪跟踪小对比度、小目标的能力。它与上述抗复杂背景能力测试方法相同,只是仿真图像的生成方式不同。
(1)在视频仿真背景下生成均匀背景的图像。
(2)图像中的模拟目标应不大于(3×3)像素。
(3)光电跟踪仪仍采用电视摄像头作为图像传感器,同时将视频信号输送给视频跟踪器和红外跟踪器。调整光电跟踪仪与投影屏幕的距离以及摄像头的焦距,使图像中不再出现屏幕以外的其他背景。
(4)分别设置不同对比度(量值从10%到3%)的目标。在相同的条件下,光电跟踪仪稳定跟踪目标时所测得的最小对比度越小,表示其远距离跟踪能力越强。
2.3 自主捕获能力测试
光电跟踪仪的自主捕获是指光电跟踪仪按照预定的程序,在方位、俯仰方向上进行二维自动扫描,图像处理器自动检测识别目标,当发现并捕获目标后,即转入自动跟踪状态[5]。
自主捕获能力的室内测试与上述抗复杂背景能力测试方法相同,只是仿真图像的生成方式不同:在视频仿真背景下生成均匀背景的图像;目标的成像大小约为(5×5)像素;目标与背景的对比度不大于10%。光电跟踪仪仍采用电视摄像头作为图像传感器。
(1)光电跟踪仪在方位、俯仰方向上与目标偏开一定角度,使目标不在视场内。
(2)光电跟踪仪接到搜索指令后,按方位、俯仰方向自动搜索,记录方位、俯仰方向搜索范围角。用该数据表示光电跟踪仪的自主捕获范围。
(3)目标进入视场后,视频跟踪器应自动捕获目标,光电跟踪仪转入自动跟踪;在跟踪稳定后,通过激光进行自动测距;在回波稳定后,应输出跟踪状态并连续发送目标诸元,记录从捕获到发送目标诸元的时间。用该数据表示光电跟踪仪的自主捕获时间。
(4)图像观察和测量:测试人员定性观察显示器的视频图像亮度、清晰度变化情况;通过示波器定量测出目标与背景的对比度变化情况。这些变化量是评价光电传感器响应时间的一个重要参数。
2.4 图像处理的时延测试
图像处理的时延是由图像采集时延和信号处理时延引起的。作为伺服控制环路的一部分,时延越长,整个控制环路带宽越窄,从而影响伺服控制转台的跟踪精度、跟踪角速度/加速度,也影响光电跟踪仪从初始捕获转闭环跟踪的稳定性。
图像处理时延的测试原理如图2所示。由示波器读出的光源点亮脉冲与被测光电跟踪仪送出目标角偏差脉冲的时间差,即为图像处理的时延。图像处理时延测试波形如图3所示。
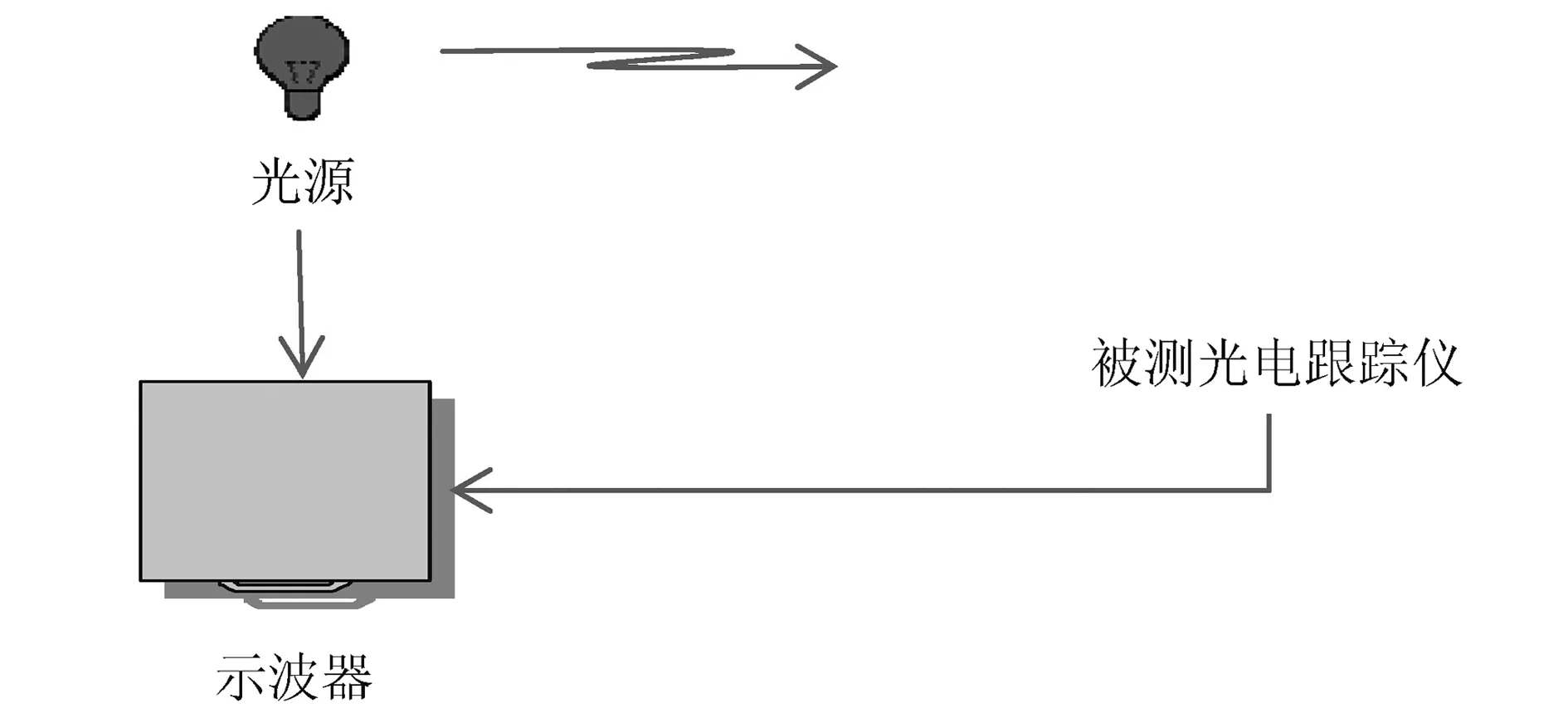
图2 图像处理时延测试原理
时延测试需要记录数据的3种情况(见图4):一是目标处于高低视场的最上部情况;二是目标处于高低视场的中部情况;三是目标处于高低视场的最下部情况。由于目标检测处理的方法不同,在这3种情况下时延可能是不同的,但从伺服控制的预测和外推算法来考虑,时延最好是相同的,而对目标的左右位置不作要求。

图3 图像处理时延测试波形
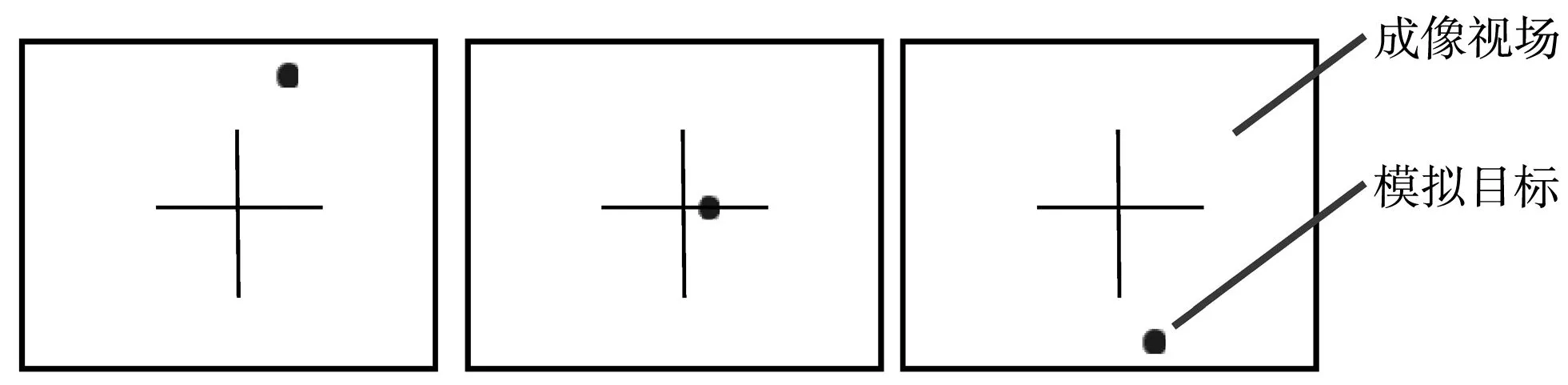
(a) 目标在上部 (b) 目标在中部 (c) 目标在下部 图4 目标处于视场的不同位置示意图
3 实验结果与分析
按照上述测试原理和方法,在室内对光电跟踪仪的4项指标分别进行了实验测试。
3.1 抗复杂背景能力实验
本实验以海面为背景进行仿真,背景为海天线,目标为小船,仿真图见图5。按视频中的背景复杂程度将背景分为复杂程度低、复杂程度中等、复杂程度高3种情况。表1记录了A型、B型、C型3种型号光电跟踪仪的抗复杂背景能力测试数据。
从表1测试数据来看,3种型号光电跟踪仪的抗复杂背景能力有较大差异,A型抗复杂背景能力最强,C型抗复杂背景能力最弱。
3.2 远距离跟踪能力实验
将图像中模拟目标的大小设置为(3×3)像素(见图6),用示波器监视视频中目标的大小、目标与背景的对比度,选取图像对比度10%、7%、5%、4%、3% 5种情况进行测试。表2记录了光电跟踪仪的目标跟踪测试情况。

图5 以海面为背景的仿真图像表1 3种型号光电跟踪仪抗复杂背景能力测试的最小对比度数据 %
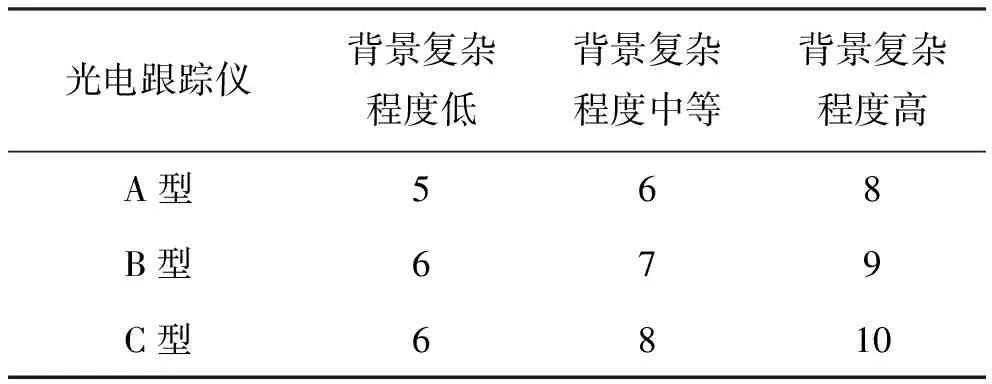
图6 远距离小目标的仿真图像
从表2可以看出:当视频中目标与背景的对比度≥7%时,3种型号光电跟踪仪均能稳定跟踪目标;当视频中目标与背景的对比度逐渐变小时,3种型号光电跟踪仪的跟踪逐步变得不稳定,相当于目标逐渐变远时远距离跟踪能力逐步变差。

表2 光电跟踪仪的目标跟踪测试情况
3.3 自主捕获能力实验
对于自主捕获能力的测试采用室内设置光源的方式进行实验。将光电跟踪仪的自主捕获范围设置为:方位不变,高低角60°。调节光源的亮度,用示波器监视视频中目标与背景的对比度,选取图像对比度10%、7%、5%、4%、3%这5种情况进行测试。表3所示为光电跟踪仪的捕获情况。
从表3可以看出:当视频中目标与背景的对比度≥7%时,3种型号光电跟踪仪均能自主捕获目标,只是捕获时间有所不同;当视频中目标与背景的对比度逐渐变小时,3种型号光电跟踪仪自主捕获目标的能力都逐步下降。

表3 光电跟踪仪的捕获情况 s
3.4 图像处理时延实验
表4所示为光电跟踪仪的图像处理时延测试数据。

表4 光电跟踪仪的图像处理时延测试数据 ms
从表4测试数据来看:不论目标处于高低视场的任何位置,A型、B型的图像处理时延是基本不变的,这有利于提高光电跟踪仪的闭环跟踪稳定性;C型的图像处理时延变化较大,这一时延将导致光电跟踪仪的闭环跟踪稳定性和精度变差。
3.5 实验与靶场测试数据的比较
3种型号光电跟踪仪分别被用于陆、海、空的不同场景,但对空探测是它们的同类项。因此,可通过对空目标探测的靶场测试数据来验证室内测评的准确性。表5所示为3种型号光电跟踪仪的靶场测试数据。

表5 3种型号光电跟踪仪的靶场测试数据
由表5可知,室内测试结果与靶场测试数据的趋势是一致的,但有些技术问题还需要进一步研究:
(1)在抗复杂背景能力的定量评价方面,从已有相关资料来看,光电跟踪仪的抗复杂背景能力缺少相应的计量标准。可以用10个级别来评价光电跟踪仪的抗复杂背景能力(1级抗复杂背景能力最弱,10级抗复杂背景能力最强),表示天空、水面、地面的不同背景复杂程度。
(2)对于作用距离的表达方式,室内测试通常不涉及大气能见度、相对湿度、温度等因素,而靶场测试与这些因素密切相关。因此,可以建立一个大气条件与作用距离的关系表或简单函数来全面评价光电跟踪仪的作用距离,比如,将能见度分为20 km、10 km、5 km、3 km、1 km 5种情况,相对湿度分为90%、70%、50%这3种情况,大气温度分为30 ℃、20 ℃、10 ℃这3种情况,用这3个维度的组合来描述不同大气特性条件下光电跟踪仪的作用距离。
(3)视频仿真的标准化问题,视频仿真的准确度主要取决于陆、海、空、天不同视频资料的采集、分析和重构,需要积累大量的有效素材,但目前的采集手段还相当有限。建立标准的视频仿真图像并将其作为计量标准,将可以统一光电跟踪仪的测试评价标准。
4 结 语
光电跟踪仪涉及成像光学、光电探测器、精密机械、自动控制、图像处理、激光测距等技术。其室内测试评价方法是多样的,不同的测试方法其结果可能相差很大。针对光电跟踪仪的抗复杂背景能力、远距离跟踪能力、自主捕获能力、图像处理时延四方面,本文分析了室内测试原理和方法,并进行了部分模拟实验和分析。从实验结果可以看出,该测试方法简便有效,可用于光电跟踪仪的室内调试、验收、评价和比对等工作。
[1] 中国人民解放军总参谋部. 光电跟踪仪规范:GJBz 20075-1992[S].北京:中国人民解放军总参谋部武器装备综合论证研究所,1992.
[2] 国防科学技术工业委员会.舰载近程反导光电跟踪仪规范GJB 5467-2005[S].北京:国防科工委军标出版发行部,2006.
[3] 王成龙,乔彦峰,于晓波,等.基于视频仿真的光电跟踪仪性能测试系统[J].液晶与显示,2011,26(5):646-649.
[4] 刘珍阳,王毅.基于仿真视频的光电跟踪器测试[J].光电技术应用,2013,28(6):68-72.
[5] 李连学,曹秋生.光电跟踪仪的自主捕获技术研究[J].激光与红外,2006,36(12):1142-1145.
