舱内动环境对捷联惯导外杆臂误差补偿影响机理分析
2018-03-14刘新学孟少飞刘庆宝
杨 其, 刘新学, 孟少飞, 刘庆宝
(1. 火箭军工程大学士官学院, 山东 青州 262500; 2. 火箭军工程大学初级指挥学院, 陕西 西安 710025)
0 引 言
飞行器飞行过程中受到的大气湍流、附面层压力波动等激励决定了固连于机体的捷联惯导在实际使用中始终处于振动、摇摆的不稳定环境中,各种研究和实验都已证明动态环境下捷联惯导的输出与静态实验室环境下的输出并不吻合[1-4],但目前成熟的误差模型和标定方法仍然将这一差别归入随机误差,说明目前对于振动给捷联惯导输出带来的影响仍缺乏明确的机理性认识。
从弹性力学的角度来看,捷联惯导本体不可能体现出绝对刚性,所以从本质上讲,处于动态环境下的捷联惯导本体存在无数个自由度,即使将这一问题简化为仅考虑正交坐标系3个轴向的线运动和绕轴向角运动的影响,通过现有的研究分析,在各种安装方式下,这些轴向的线运动和角运动在不同安装方式下仍存在不同程度的耦合[5-6],使得全面分析振动对捷联惯导输出影响的机理问题变得十分困难。另外,由于惯性仪表本身必然有一定尺寸,并不能完全按照“点测量组件”安装于本体质心,当飞行器出现角运动时会出现内杆臂误差,同时惯导本体质心与飞行器质心并不重合,惯性仪表测量值在换算过程中又会带来外杆臂误差。在杆臂长度已知或误差输出频率特性已知的情况下,可以对该问题进行力学补偿和数字滤波补偿[7-9],在杆臂长度未知情况下也有研究直接将其作为未知量通过其余先验信息进行动态在线标定[10-12]。
为了使影响机理分析更为清晰,本文假设惯导系统仅受到垂直于支架的横向振动影响,且惯导本体内部呈现绝对刚性并忽略内杆臂误差,从等效欧拉梁和线性减振混合系统模型出发,对欧拉梁和弹簧振子的结构动力学方程统一处理并利用Green函数法对其进行求解,详细分析了横向振动对捷联惯导加速度计外杆臂效应误差补偿造成影响的机理。
1 等效欧拉梁混合系统模型
捷联惯导在舱体内通过支架安装与飞行器固连,一般在支架和捷联惯导本体之间会设计橡胶垫、钢套等减振系统,同时结合舱内不同情况安装方式稍有不同,但其基本结构如图1所示。

图1 舱内捷联惯导安装示意图Fig.1 SINS installed in apparatus cabin sketch map
为了能更清晰地分析振动对杆臂效应带来影响的机理,仅考虑一维情况下捷联惯导在平面内作垂直于支架的横向振动,忽略舱内支架的剪切变形和绕中轴转动惯量的影响,将支架模型化为两端简支的欧拉梁,将减振系统模型化为若干个阻尼弹簧振子,此时系统简化为一个长度为l的简支欧拉梁,在xi(i=1,2,…,h)处与h个阻尼弹簧振子相连而构成的混合系统,系统结构如图2所示。
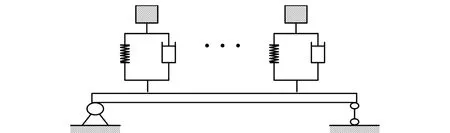
图2 等效欧拉梁混合系统示意图Fig.2 Euler beam hybrid system sketch map
1.1 混合系统运动微分方程
单独考虑阻尼弹簧振子系统或欧拉梁振动问题均已形成了经典理论,由欧拉梁理论的假设可知梁中心的平剖面在变形后仍为平面而且仍与轴线垂直,由于梁的横向位移仅在与弹簧振子系统连接处产生弹性力和阻尼力,利用δ函数的性质并结合受力分析将两者的运动方程联系起来,可得欧拉梁的振动方程为
(1)
h个阻尼弹簧振子的振动方程为
(2)
且式(1)中
(3)

1.2 平稳随机激励下混合系统响应分析
飞行器所承受的振动激励大多呈现随机性,所以要想确定性求解模型的响应十分困难,但可以依据随机振动理论求解出响应过程的数字特征[13-14]。假设飞行器处于平稳随机激励条件下,首先对上述模型进行无量纲化,利用分离变量法和Green函数法[15-16]求解微分方程,得到无阻尼自由振动条件下的各阶固有频率和振型。
根据文献[17-19]的推导,混合系统中欧拉梁的响应为
(4)
阻尼弹簧振子的响应为
YT(xi)Aia(t),Ai=diag[Bin]
(5)
式中,y(x,t)表示欧拉梁各点随时间的响应;yi(t)表示混合系统中振子随时间的响应;Yn(x)表示混合系统的n个固有振型;Bin表示梁位移和弹簧振子位移之间的关系;Ai表示由Bin生成的对角阵;αn(t)表示待求解的模态响应。
不失一般性地认为混合系统阻尼为非经典阻尼,采用复模态方法[20-21],对未求解的αn(t)进行复模态变换,利用系统特征方程可求得2N个共轭成对出现的特征值和特征向量,其中由特征向量构成的模态矩阵记为u,进而求得混合系统复模态响应z的协方差函数矩阵Cz(t),并根据αn(t)与z的复模态变换关系,得到未求解的αn(t)的协方差函数矩阵为
(6)

进而可得到混合系统中各弹簧振子的质量块响应的协方差函数为
Cyiyj(τ)=YT(xi)AiCα(τ)AjY(xj)
(7)
利用线性系统的可加性,可以将h个弹簧振子系统等效为一个,并令τ=0,则得到质量块响应的方差为
Vary1y1=YT(x1)A1Cα(0)A1Y(x1)
(8)
2 对外杆臂误差补偿影响机理分析
2.1 加速度外杆臂误差原理
由于假设惯导本体内部呈现绝对刚性,其内部各惯性元件不会受到减振系统和动态环境影响,因此忽略内杆臂误差,所有惯性测量元件均作为“点测量组件”安装于惯导本体的质心,但飞行器质心与惯导本体质心并不重合,当飞行器存在角运动时,在两质心位置测量值换算过程中会出现外杆臂误差,其基本原理如图3所示[22]。

图3 外杆臂效应误差原理示意图Fig.3 External lever arm effect sketch map
图中,Oi和Ob分别为惯性坐标系和飞行器载体坐标系中心,P为捷联惯导本体质心,rp为外杆臂,ωib为载体角速度。
在图3所示的位置情况下,当飞行器出现角运动时,根据运动学原理,加速度计位置的比力和飞行器质心处的比力关系为
(9)
式中,αp表示加速度计位置处比力;ab表示飞行器质心处比力。两者的差值即为外杆臂误差Δa:
(10)

2.2 动环境对外杆臂误差补偿的影响
结合第1节中欧拉梁混合系统模型,可以看到在动态环境下,由于飞行器持续受到外部激励的作用,捷联惯导本体也将持续产生动态响应,即本体质心P始终处于变化中,外杆臂rp也不再为确定性矢量,则此时误差应表示为
(11)
式中,Δr为外杆臂变化量。
欧拉梁混合系统模型仅分析了机体坐标系Zb方向的一维动态响应,在此条件下外杆臂rp的变化如图4所示。

图4 外杆臂长度变化示意图Fig.4 Change of external lever arm sketch map
可以看到在动态环境中,外杆臂由确定性矢量变成了“一簇”变量,不失一般性地认为外杆臂矢量应遵守混合系统动态响应方向且围绕静态条件下常值发生变化,即
(12)
由式(8)可得外杆臂变量的方差为
Var(Δr)=YT(x1)A1Cα(0)A1Y(x1)
(13)
结合方差的性质,可得
(14)
3 仿真算例
设飞行器舱内安装的捷联惯导系统等效于简支欧拉梁与阻尼弹簧振子相连的混合系统模型,本体等效于阻尼弹簧振子系统质量块,该模型各参数在无量纲化后如表1所示,并将系统外部激励理想化为白噪声。

表1 无量纲化后模型参数设置
根据前文介绍方法,首先求出混合系统的固有频率和振型,将模态截断到第5阶并采用模态分析的方法利用式(6)求解出Ca(τ),最终可求得本体动态响应的方差为
Vary1y1=0.109 55×10-2
取该方差值为飞行器某一时刻本体出现的动态响应,假设该时刻飞行器绕Zb轴出现了0.02 rad/s的角运动,结合某型飞行器的惯导系统具体安装几何位置将其代入纯惯性制导方式下的理论弹道进行仿真飞行,以0.05 s为取样周期,惯性坐标系Xi方向位置解算偏差数据结果如图5所示。
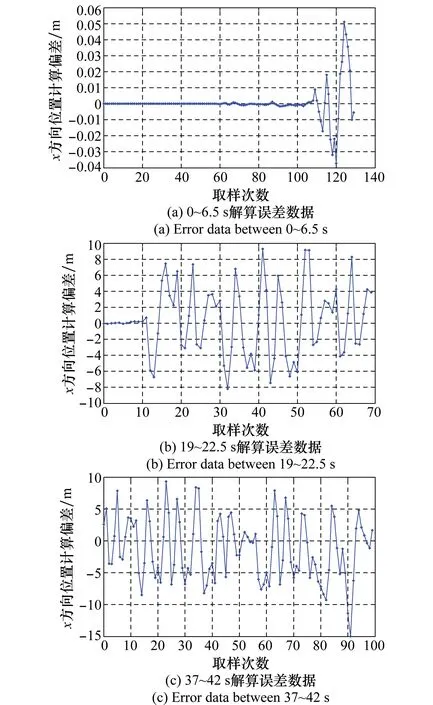
图5 位置解算偏差Fig.5 Deviation of position calculating
算例中初始时刻本体动态响应对加速度造成的误差为10-4数量级,相当于在该时刻对加速度计加入了一个未补偿的零位偏差。通过图示可以看到,在最初代入动态误差的时间段内,计算结果与标准理论弹道仍基本吻合,6 s后误差弹道开始围绕标准理论弹道出现漂移,在19 s左右的时间造成的Xi方向位置数据偏差达到米级。需要特别说明的是,位置解算的结果偏差并不代表外杆臂误差会随时间累积放大,在整个飞行过程中,外杆臂误差仍遵守前文推导的运动学规律,但由于导航解算算法默认惯导输出的数据绝对准确,一旦引入该测量误差仍会造成相当的解算偏差。算例虽然是在理想化外部激励条件下进行计算,但足以说明如存在长航时飞行或飞行器出现急速转弯时,该误差并不能忽略不计。
4 结 论
在线性系统的假设前提下,舱内捷联惯导本体可以等效为简支欧拉梁与阻尼弹簧振子混合系统计算其动态响应。
静态条件下,作为确定性矢量处理的外杆臂随混合系统响应出现的随机变化,是造成动态环境下该误差不能完全补偿的重要原因。
如果能够在贴合实际工况情况下,得到热、流体、结构耦合的飞行器动态响应规律作为本文模型的输入,将对该问题的研究大有帮助。同时,研究仅考虑了垂直于支架的横向振动影响,与实际工况仍有一定的差别,对该问题可以进一步考虑捷联惯导本体安装所受到的径向振动和弯曲剪切力,从而等效为杆或者Timoshenko梁混合系统进行分析,以期得到多个加速度计和陀螺仪敏感轴向上的动态影响。
[2] BLENDER M A, WILKIN H. Flight dynamics of a hypersonic vehicle during inlet un-start[C]∥Proc.of the 16th AIAA/DLR/DGLR International Space Planes and Hypersonic System and Technologies Conference, 2009: AIAA-2009-7292.
[3] BO W, ZHI H D, CHENG L, et al. Estimation of information sharing error by Dynamic Deformation between inertial navigation system[J].IEEE Trans.on Industrial Electronics,2014,61(4):2015-2023.
[4] SAVAGE P G. Analytical modeling of sensor quantization in strapdown inertial navigation error equations[J]. Journal of Guidance, Control and Dynamics, 2002, 25(5): 833-842.
[5] 张志鑫, 张大伟. 捷联惯组减振系统角振动、线振动共振频率理论分析[J]. 中国惯性技术学报, 2009,17(6):654-657.
ZHANG Z X, ZHANG D W. Theory analysis on resonance frequencies of linear vibration and torsional vibration of strapdown IMU damping system[J]. Journal of Chinese Inertial Technology, 2009,17(6):654-657.
[6] 付继波,马静,姚建军.弹性支撑惯导系统振动耦合问题研究[J].强度与环境,2005, 32(2): 46-51.
FU J B, MA J, YAO J J. Coupling vibration study on the elastic supported inertial navigation system[J]. Structure and Environment Engineering, 2005, 32(2): 46-51.
[7] LIU Z, WANG L, LI K, et al. A compensation method of lever arm effect for tri-axis hybird inertial navigation system based on fiber optic gyro[J]. Measurement Science & Technology, 2017, 28(5):055103.
[8] QIAN Z, LEI W, ZENG J L, et al. An accurate calibration method based on velocity in a rotational inertial navigation system[J].Sensors, 2015, 15(8):18443-18458.
[9] 严恭敏,严卫生,徐德民.捷联惯性测量组件中内杆臂效应分析与补偿[J],中国惯性技术学报,2008, 16(2):148-153.
YAN G M, YAN W S, XU D M. Analysis and compensation on inner lever arm effect of strapdown inertial measurement unit[J]. Journal of Chinese Inertial Technology, 2008, 16(2):148-153.
[10] LU Y, CHENG X. Random misalignment and lever arm vector online estimation in shipborne aircraft transfer alignment[J]. Measurement, 2014, 47(1): 756-764.
[11] HONG S, MAN H L, CHUN H H, et al. Experimental study on the estimation of lever arm in GPS/INS[J]. IEEE Trans.on Vehicular Technology, 2006, 55(2): 431-448.
[12] QUAN C, MAI Y Z, YAN Z. Dynamic lever arm compensation of SINS/GPS integrated system for aerial mapping[J]. Measurement, 2015, 60:39-49.
[13] LUTES L D, SARKANI S. Random vibrations: analysis of structural and mechanical system[M]. Burlington: Elsevier Butterworth-Heinemann, 2004.
[14] TOOTKABONI M, GRAHAM-BRADY L. Stochastic direct integration schemes for dynamic systems subjected to random excitations[J].Probabilistic Engineering Mechanics,2010,25(2): 163-171.
[15] LI X Y, ZHAO X, LI Y H. Green′s functions of the forced vibration of Timoshenko beams with damping effect[J]. Journal of Sound and Vibration, 2014,333(6):1781-1795.
[16] FODA M A, ABDULJABBAR Z. A dynamic Green function formulation for the response of a beam structure to a moving mass[J].Journal of Sound and Vibration,1998,210(3):295-306.
[17] 方同.工程随机振动[M].北京:国防工业出版社,1995.
FANG T. Engineering random vibration[M]. Beijing: National Defense Industry Press, 1995.
[18] NAGULESWARAN S. Transverse vibration of an uniform Euler-Bernoulli beam under linearly varying axial force[J]. Journal of Sound and Vibration, 2004,275(1):47-57.
[19] ABU-HILAL M. Forced vibration of Euler-Bernoulli beams by means of dynamic Green functions[J]. Journal of Sound and Vibration, 2003,267(2):191-207.
[20] XING X, BRIAN F F. Complex modal analysis of a nonmodally damped continuous beam[J]. Journal of Vibration and Acoustics, 2015, 137(4): 04106.
[21] NATALE A, GIUSEPPE F, ADOLFO S. Complex modal analysis of rods with viscous damping devices[J]. Journal of Sound and Vibration, 2014,333(7):2130-2163.
[22] ZHI X, HUI P, JIE W, et al. Dynamic calibration method for SINS lever-arm effect for HCVs[J]. IEEE Trans.on Aerospace and Electronic Systems, 2015, 51(4): 2760-2770.
[23] 俞文伯,高国江,房建成.基座角振动对捷联惯导加速度测量所产生的影响及其误差补偿方法[J].中国惯性技术学报,2002, 10(2):18-23.
YU W B, GAO G J, FANG J C. Accelerations′ measurement errors caused by base vibration and their eliminating approach[J]. Journal of Chinese Inertial Technology, 2002, 10(2):18-23.