微型车线控转向系统的研究
2018-03-12
(北京信息科技大学 北京 100192)
一、引言
汽车工业发展至今的百余年里,控制技术在不断的进步[1],在一定程度上反映了汽车的工业水平[2]。自动驾驶汽车开始出现在人们的视野中。而在自动驾驶车辆转向过程中,方向盘依然随着转向柱在旋转。在高级驾驶辅助系统(ADAS)和自动驾驶技术飞速发展的今天,若要让转向系统集成到整车控制、听从中央处理器的指挥,则势必要抛弃这种传统的机械连接,加入智能的处理器和执行器以精准地、安全地控制转向的力度和角度。
本文在系统仿真的基础上,完成了微型车线控转向系统的硬件改造和控制策略设计,利用PID算法控制转向电机电流,并对微型车实车试验结果进行了分析。
二、线控转向系统结构与建模
(一)线控转向系统结构
线控转向系统是由转向盘总成、转向执行总成、转向控制器以及容错系统、汽车总线网络和车载电源等辅助系统组成[3],图1为线控转向原理示意图。线控转向系统摒弃了转向柱万向节等部件,改为电信号总线技术传输控制信息。驾驶员转动方向盘,安装在方向盘部位的转角传感器将转角信息输入到转向控制器中,控制器结合当前车速、横摆角速度、质心侧偏角等车辆状态信息计算出适合当前汽车运行状态的转向传动比作为理想转向传动比,控制器按照设计好的控制策略计算出转向执行电机需要的电流,转向执行电机连接转向器,经过转向执行机构使前轮转向,达到驾驶员希望转过的角度,前轮转角传感器将当前转角信息反馈给控制器,形成闭环控制。线控转向系统原理图如图1。
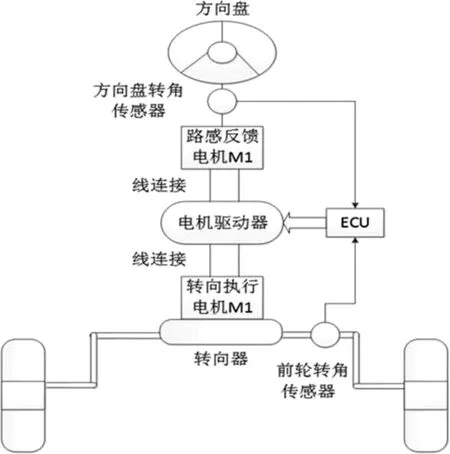
图1 线控转向原理图
(二)线控转向系统建模
方向盘系统模型:
(1)
(2)
(3)
转向执行电机模型:
(4)
式中Js为转向盘子系统等效到转向柱的转动惯量;θh为转向盘转角,Cs为转向盘子系统等效到转向柱的阻尼系数;Th为转向盘转矩;Tsm为路感电机转矩;Gsm为路感电机减速器传动比;Jf为前轮子系统等效到前轮转向销的转动惯量;Cf为前轮子系统等效到前轮转向销的阻尼系数;Tfm为前轮转向电机转矩;Ta为前轮的回正力矩;θf前轮转角;Jfm为前轮转向电机转动惯量;θfm为前轮转向电机转角;Cfm为电机轴阻尼系数;Tfm为前轮转向电机转矩;Gs为齿轮齿条转向器传动比;Gfm前轮转向电机减速器传动比;d为轮胎气压拖距与轮胎机械拖距之和,视为一定值;v为侧向速度;u为车辆汽车前进速度;k1为前轮侧偏刚度;ke电动势常数。
根据上述微分方程建立Simulink模型,结合微型试验车的整车参数,建立CarSim整车模型。控制框图如图2所示。

图2 控制框图
三、理想传动比的设计
在传统的机械转向系统中,转向系统的总传动比为:
(6)
传动比i由机械系统决定。传动比是操纵性中的转向特性和转向盘力特性,以及稳定性方面的直线行驶路径保持性的影响因素[7]。对于微型试验车原转向系统而言,i为定值。试验车的稳态横摆角速度增益[7]如下所示:
(7)

图3 横摆速度增益与车速关系
通过仿真如图可以看出,汽车的稳态横摆角速度增益会随着车速的增大呈现先增大后减小的趋势,在对试验车的设计之中,因为试验车的最高车速小于60km/h,故横摆角速度增益会随着车速的增加而增大。这就要求试验车在低速时具有较小的传动比,中高速时需要较大的传动比。从而减小驾驶员的操纵负担,使车辆横摆角速度系统增益稳定为一常数,提高行驶安全性。
本文基于期望的横摆角速度增益为一定值,设计了微型试验车的传动比,如式(8)(9)。
(8)
(9)
微型试验车的最高时速为50km/h,为方便研究,以时速10km/h为界限,划定了试验车的低速区和高速区。低速状态下,试验车传动比为一定值,前轮最大转向角度为30°,令i=6,方向盘转动角度为±180°,方向盘由左极限位置到右极限位置打满一圈即可实现前轮由左极限角度转到右极限角度,保证轻便性的同时,大大提高了转向灵活性,可方便驾驶员停车移位;高速状态下为可变传动比,即式(10)。

(10)
四、线控转向系统控制策略的设计
线控转向系统虽然实现了传动比的自由设置,但是要使前转向轮按照转向盘转角和可变传动比决定的期望前轮转角进行准确的转向,需要对前轮电机进行适当的位置控制,进而保证前轮转动角度的精确性。安装在方向盘下方的转角传感器,输出的信息为方向盘目标转角,把目标转角和角度传感器输出的实际转角的差值作为线控转向系统控制器的输入,控制器结合车辆当前的车速和其他参数调整电机的电流和占空比,来控制转向执行电机,从而达到驾驶员希望转动的角度。
在过程控制中,按偏差的比例、积分和微分进行控制的PID控制器是应用最为广泛的一种自动控制器[7]。针对本线控转向系统,采用了应用普遍的PID算法。经过在线调整,系统响应效果较好,本设计确定KP、KI、KD参数分别为12、0.005、0.06。
五、实验结果分析
将设计好的传动比和PID控制算法用C语言编写成控制程序,通过Keil软件将程序写入STM32F103单片机中,用12V铅酸蓄电池转角传感器、控制器、转向电机和实验设备供电供电,控制器对应引脚连接电机驱动器,电机驱动器连接转向执行电机和路感电机。用Racelogic公司的V-BOX3来检测车辆的速度和横摆角速度等信息。用RMS公司的测力方向盘、DEWE数据采集仪采集方向盘转角和转矩信息。在混凝土路面,车速保持20km/h,在1s时间内,通过DEWE实时显示系统,方向盘转过20°,进行试验[8][9]。实验结果如图4所示。
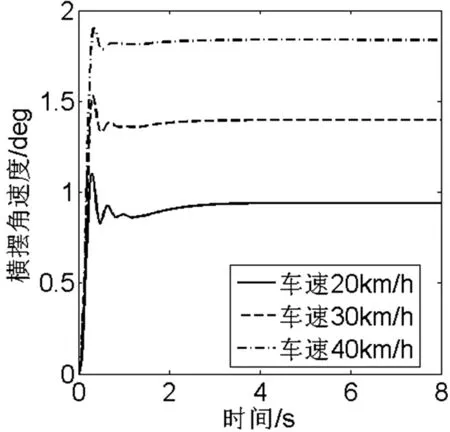
图4 横摆角速度随时间变化曲线
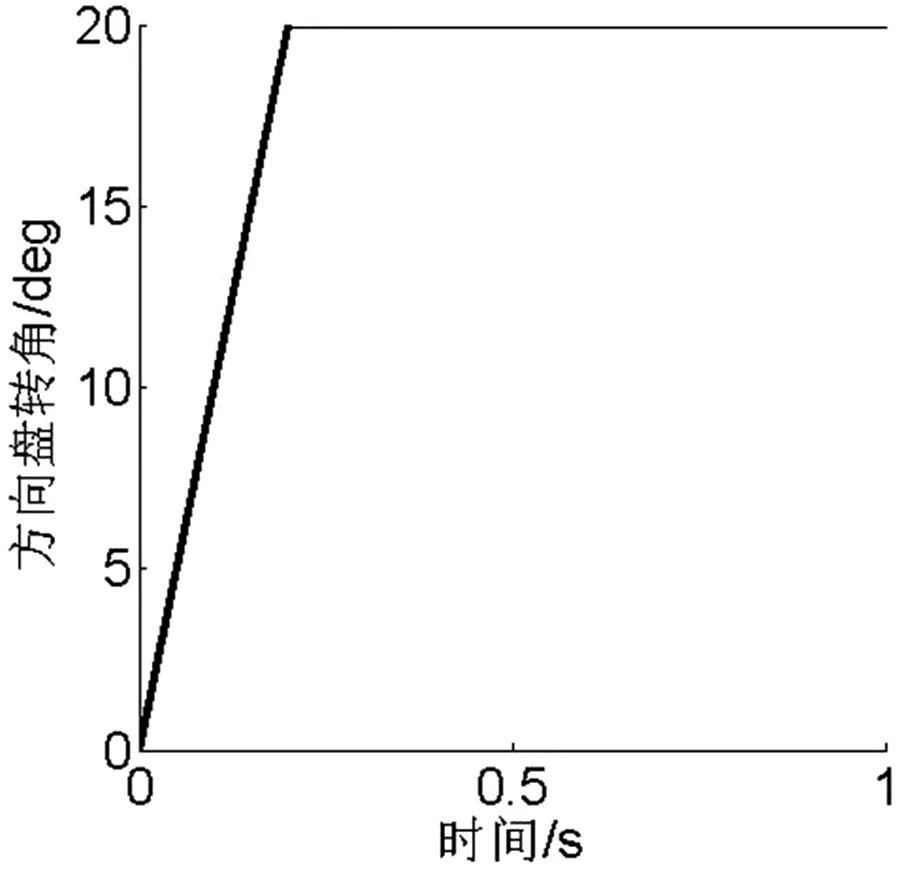
图5 方向盘角阶跃输入
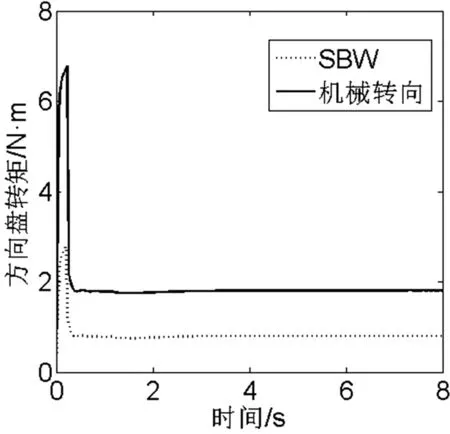
图6 方向盘转矩与时间关系
经过时速20/km,30km/h,40km/h情况下的方向盘角阶跃输入试验,可以看出试验车的横摆角速度稳定在合理范围之内,能够快速响应转向需求,在中高速时,系统稳定时间较低速时更快。经过计算,横摆角速度增益稳定在0.4左右。同时,转向盘输入转矩大小明显降低,提高了转向轻便性,减小了驾驶员操作负担。
六、结论
本文运用Matlab/Simulink与CarSim软件对线控转向系统进行了联合仿真,针对微型车原有机械转向系统进行了改造,设计了转向控制策略,并进行了试验。试验结果表明,改造后的微型车转向系统,响应快速,操纵稳定性提高,转向轻便性更好,同时为整车线控化平台的搭建提供了较好的工程意义。
[1]周聪,肖建.汽车线控转向系统的研究现状与发展[J].控制工程,2012,(5):827-831.
[2]王祥.汽车线控转向系统双向控制及变传动比特性研究[D].吉林大学,2013.
[3]倪常斌.汽车线控转向系统建模与控制策略研究[D].东北大学.2011.
[4]余志生.汽车理论[M].北京:机械工业出版社 2000
[5]Christopher D.Gadda,Shad M.Laws and J.Chritian Gerdes.Generating Diagnostic Residuals for Steer-by-Wire Vehicles[J].IEEE Transactions on Control Systems Technology,2007,15(3):529-540.
[6]Andrew Heathershaw.Optimizing Variable Ratio Steering for Improved On-Centre Sensitivityand Cornering Control.SAE Paper 2000-01-0821,2000.
[7]张静.MATLAB 在控制系统中的应用[M].合肥:中国科学技术大学出版社,2001
[8]王长青.乘用车中心区操纵稳定性客观评价指标体系研究[D].吉林大学,2012.
[9]GB 6323.2—94.汽车操纵稳定性试验方法——转向瞬态响应试验(转向盘转角阶跃输入).[S].天津:全国汽车技术标准化委员会,1994.
