十字路口的交通流模型及其应用
2018-03-12戴钟保李雅芳林海欣胡伟斌
戴钟保,李雅芳,林海欣,胡伟斌
(汕头大学数学系,广东 汕头 515063)
0 引言
交通运输问题向来是国家民生及经济发展的重要组成部分,虽然道路越修越宽,越建越多,但交通拥堵和道路通行效率低的问题依旧困扰着人们.元胞自动机自20世纪80年代被提出之后,于20世纪90年代得到迅猛发展.作为一种新的交通流动力模型,元胞自动机基于离散的时空和状态变量,一方面易于计算机编程操作,能够灵活地修改交通规则条件,另一方面保留了交通系统复杂的非线性行为和其他物理特征.
1992年Nagel和Schreckenberg提出了著名的NaSch模型[1],该模型虽规则简单却可以模拟出很多的交通现象.随后很多学者在其模型的基础上扩展开了许多新模型,从而更好模拟交通路况.城市交通流模型是近来交通流模型的重要课题,而对于十字路口的瓶颈研究是城市交通流模型的重点,其中十字路口信号灯的合理配时是解决交通堵塞的重要方向之一.在对十字路口交通流模型的研究当中,基于有无信号灯的控制可分为两大研究方向.在无信号灯控制的十字路口研究当中,2002年Ruskin等人[2]将可接受车头距概念引入无信号灯控制的十字路口交通模型;2008年王俊骅等人[3]对无信号灯控制人行横道的人车冲突进行了定量的分析;2010年袁绍欣等人[4]提出了基于混杂Petri网的车流通行模型,描述了无信号十字路口车流通行的基本特征.在对有信号控制的交叉路口研究中,2001年Brockfeld等人[5]将信号灯信号控制增添进NaSch和BML耦合模型中,有效避免了系统进入完全堵塞的状态,研究了信号周期对车辆在十字路口通行能力的影响;同年我国学者杨晓光等人[6]对包含行人、非机动车和机动车在内的混合十字路口网络进行分析,提出了行人专用控制信号设置的新模型;2006年葛宏伟[7]探究了不同类型公交站点车辆停靠站点与其他交通流之间的相互作用和影响机制,建立了对应的公交站点车辆停靠延误模型及公交停靠对其他交通流延误和道路通行能力的影响模型.
本文在以上学者的工作基础上,采用基于Brockfeld等人对NaSch和BML耦合模型的优化模型,并进一步引入了Takayasu-Takayasu慢启动规则[8],建立二维元胞自动机的十字路口交通流模型,以广东省汕头市大学路西港路口为实际案例,分别设计了不同周期时长的信号灯周期模型及高架桥模型,并通过仿真实验论证了信号灯周期时长对十字路口交通环境存在显著影响,而高架桥模型能够有效地提高车辆平均通行速度,降低平均耗时,改善道路通行能力,进行了模拟仿真研究,并通过实地考察,确定了西港路口各项交通状况,用Matlab软件进行仿真计算.
1 模型和演化规则
该模型为多车道十字路口交通流模型,在不考虑非机动车和行人的情况下,假设所有车辆具有相同的长度和宽度,这样模型简单同样能够反映十字路口模型的交通流特性.运用元胞自动机模型将道路视为离散化的格点,由n(n≥3)条长为L的东西双向车道m(m≥3)条长为L的南北双向车道组成,交叉路口为东西双向车道与南北双向车道的交叉处,交叉路口处车辆可以直行和左转,在各个方向十字路口前设置右转匝道,并在十字路口各个方向的十字路口处设置信号灯,各路口交通信号灯实行同步转换,右转匝道车辆不受交通信号灯控制,模型如图1所示.
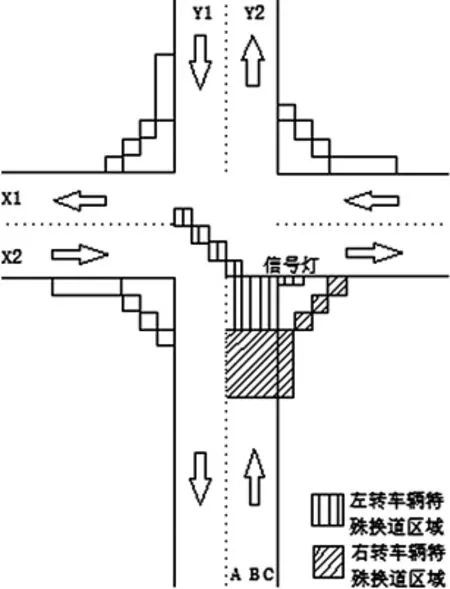
图1 十字路口交通流模型
横向车道用X表示,纵向车道用Y表示,X1车道上车辆由东向西行走,X2车道上车辆由西向东行走,Y1车道上的车辆由北向南行走,Y2车道上车辆由南向北行走.图1为以Y2车道上车辆的运行示意图,A,B,C分别表示三个车道,在交叉路口前分别设置左转车辆与右转车辆的特殊换道区域I和II,采取特殊换道规则,两个特殊换道区域分别对应的元胞长度为L1和L2,除去交叉路口与特殊换道区域外,其他区域采取对称的双车道换道规则.斜线部分表示右转匝道,竖线部分表示左转匝道,交叉路口前为停止线.每一时刻,车道上的每个元胞可以被一辆车辆占据或为空,存在三种车辆,分别为左转,直行和右转车辆,最大速度根据不同区域取不同的值,在特殊区域与及交叉路口,所有车辆的最大速度为,其他区域车辆的最大速度为,其中,整个模型采取开口边界条件.下面介绍车辆的运行规则和换道规则.
1.1 车辆换道规则
在整个模型中车辆分别采取两种换道规则,分别为对称的双车道换道规则和特殊换道规则.首先介绍对称的双车道换道规则:

其中dn表示当前车辆与前车之间的空元胞数,dn,other,dn,back分别表示当前车辆与目标车道上的前车和后车之间的空元胞数.换道规则中为换道动机,表示车辆在当前车道不能按照期望的最大速度行驶,而目标车道的行驶条件比当前车道好.dn,back>dsafe为安全条件,保证换道后不与目标车道上的后车发生碰撞,这里dsafe取值为.当车辆满足换道动机和安全条件时,会以一定的概率Pchange进行换道,以rand<Pchange表示.
当车辆处于特殊换道区域时,当车辆运行至区域I时,对于车道A上的直行车辆与及车道B和车道C上的左转车辆,车辆采用主动换道规则为:dn,back≥dsafe.主动换道表示只要目标车道存在空间并且满足安全条件,车辆就会换道.在停车线前车道B和车道C的左转车辆必须换到车道A,车道A上直行车辆必须在停止线前一个元胞换到车道B,否则停车等待.当车辆运行至区域II时,对于车道A和车道B上的右转车辆,车辆同样采用主动换道规则,对于车道C上的右转车辆采用主动换道规则进入右转匝道.在区域II与区域I的分割线前,车道上右转还没进入右转匝道的右转车辆必须停车等待.
1.2 车辆运行规则
下面以一个路口的相位来说明车辆运行规则:
(1)绿灯时步T1,进入该十字交叉路口的左转车辆按照图中所示的左转匝道运行,对于右转匝道的右转车辆均按图1所示的右转匝道运行,其余车辆按NaSch模型演化;
(2)红灯时步T2,该路口内欲进入十字路口的左转车辆和直行车辆在十字路口前停止演化,其余车辆按NaSch模型演化.对于右转匝道的右转车辆均按图1所示的右转匝道运行,不受信号灯控制.
(3)黄灯时步T3,对于已经进入交叉路口的车辆继续按照原来的运行规则运行,未进入交叉路口的车辆则在停止线前停车等待,其余车辆按NaSch模型演化,其他路口均为红灯时步.
2 仿真实验
实验以汕头市大学路西港路口为实例.大学路西港路口是进出中心城区的交通要道,东北-西南双向为四车道,西北-东南双向为三车道,单车道道路宽4 m,各个方向道路建有右转匝道,中间绿化带道宽2 m,人行道宽约12 m,中心路口限速40 km/h,道路最高速度为60 km/h,最低限速为20 km/h.为能够较好地模拟交通堵塞现象,同时考虑到程序界面可视化限制,将该十字路口做网格化处理,规格为81×81,每个网格代表4 m×4 m的正方形空间.暂不考虑不同汽车的尺寸,视每辆汽车能且仅能容纳于一个网格;将最低限速20 km/h转化为程序参数,即为1格/0.72 s,每一步长为0.72 s.
以40 km/h速度为车辆在十字路口和特殊换道区域的最高限速,将该速度转化为模型标准速度即为2单位元胞/单位时间(,其余位置车辆的最大速度为3单位元胞/单位时间(V2max=3),两个特殊换道区域L1和L2长度均为5单位元胞.整个路口红绿灯周期为229单位时长,左转绿灯时长和直行绿灯时长相一致,黄灯时长均为3单位时间,其中西南方向绿灯时长为75单位时长,东南方向为94单位时长,东北方向为41单位时长,西北方向为19单位时长,各方向绿灯时长占比为3.8∶4.7∶2.2∶1.0,模型演化时间为30 min.
设计好初始十字路口仿真模型后,仅通过相关道路规则的调整,即可完成对应的初始信号灯周期模型、人工调节信号灯周期模型、智能信号灯周期模型和高架桥模型.初始信号灯周期模型即为实地考察的大学路西港路口交通路况;人工调节信号灯周期模型是在初始信号灯周期模型的基础上,通过多次实验观察各个路口的交通拥堵情况,依据经验调整最优的信号灯周期,即在各个路口黄灯时间步不变的情况下,在相对拥堵的路口相对应地增加绿灯时间步,其他车流量相对较少的路口相应地减少绿灯时间步;智能信号灯周期模型是通过检测各个路口在十字路口前的单车道平均车辆数目,并经由慢启动概率的调整后作为各个路口的绿灯时间步;高架桥模型则是以目前西港路口规划蓝图为基础,以工程建设时间划分共有两期工程:一期工程仅在西南方向与东北方向建有直行高架桥,其他路口依旧存有信号灯控制系统,二期工程会在各路口均建有高架桥,不存在信号灯控制系统,各道路相当于独立的单车道模型;本文高架桥模型特指一期工程下的高架桥模型.下文进一步通过仿真实验,分析实验结果,以此探究不同模型对道路交通的影响.
3 模拟结果与分析
为进行计算模拟,定义如下有关交通流性质的量[9]:
下面首先通过比较上述四个交通流性质的量,确定更加接近现实的随机慢化概率与慢启动概率.随后分别对上述四个交通流模型进行交通低谷期、平时期和高峰期仿真实验,实验以十次仿真取平均值的方式,记录下不同模型各个时期下的车辆密度、平均通行速度、交通流流量和平均耗时,为了进一步分析关于交通信号灯对交通流性质的量的影响,对比前三个模型随着各个路口出车概率的增长平均耗时的变化趋势,从而更加直观地观察本文对于探讨交通信号灯配时问题的重要性.最后论证了高架桥的合理性.
3.1 确定随机慢化概率与慢启动概率
为了更加真实地模拟现实的路况,进一步通过实地考察,确定了西港路口各项交通状况.同一周期内各个路口在低谷期、平时和高峰期出现车辆的概率见表1,各个方向的车直行、左拐和右拐的概率见表2.

表1 出现车辆的概率

表2 各方向车辆运动方向的概率
随机慢化概率和慢启动概率依赖于十字路口的交通实际情况,可通过实地考察道路通行状况,而后通过调整参数来确定相关概率.随机慢化概率体现于驾驶员面对行驶过程中的各种不确定因素(例如道路条件、驾驶员心理变化等),为保障行车安全而降低行驶速度.慢启动概率则反映了静止车辆的启动延缓效应.
以对随机慢化概率的确定为例,通过仿真实验发现:随机慢化概率和平均通行速度、交通流流量、平均耗时存在显著的相关关系;平均通行速度和交通流流量随着随机慢化概率的提高而降低,而平均耗时随着随机慢化概率的提高而提高,而这与我们直观观念相契合:随机慢化概率的提高会加重道路拥堵程度,降低道路通行效率.当前,由于汕头市大学路西港路口的交通状况比较混乱,不遵守交通规则的行人和车辆较多,尤其是摩托车的随意通行,每天早晚高峰期经常出现进堵塞现象,道路通行效率较低.基于实地考察发现,通过仿真模型对参数的调整发现,以随机慢化的概率0.25,慢启动的概率0.5能够较好模拟出西港路口实情况更为合理.
3.2 信号灯周期配时问题对交通流的影响
在未调节信号灯时长和建立高架桥之前,西港路口一天中的低谷期、平时和高峰期的车辆密度、平均通行速度、交通流流量和平均耗时见表3.
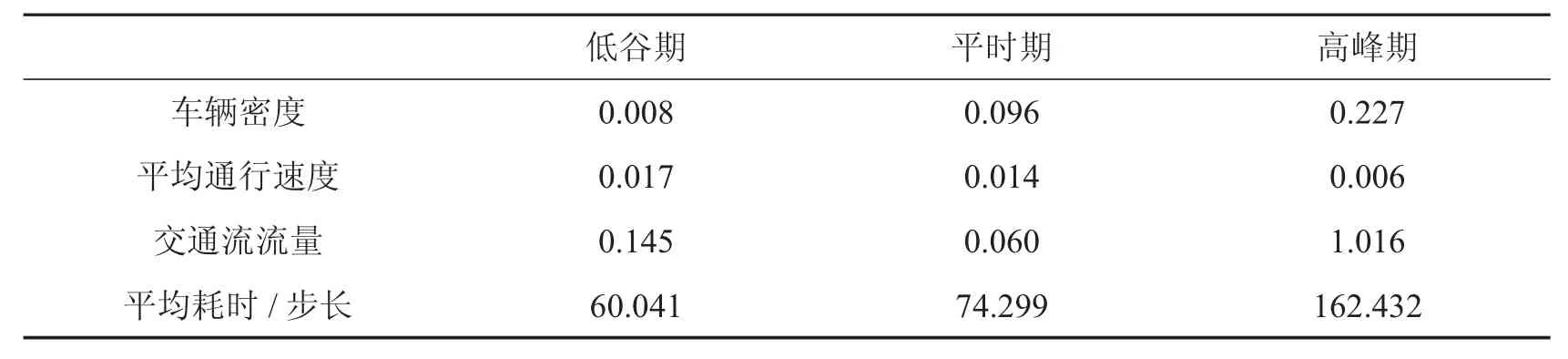
表3 初始信号灯周期模型道路通行状况
从表3可知,车辆从低谷期到平时期再到高峰期显著增多,车辆密度、交通流流量和平均耗时增大,而车辆平均通行速度下降,展现了路口交通状况的急剧变化.其中平均耗时这个指标是体现交通效率最为显著的指标,下面对平均耗时进行着重分析.
图2的模拟结果是不同模型各个路口出车概率与平均耗时的关系.由于模型的各个路口的出车概率不同,图中的出车概率等级分别表示一组出车概率,即各个方向的出车概率.图2中以出车概率等级为3表示低谷期的出车概率,出车概率等级越高,相对应的各个方向的出车概率越大,各个路口出车概率大小的增长趋势由表1的数据决定.从图中可以看到,三个模型平均耗时的变化趋势基本相同,符合现实情况,这是由于随着出车概率的增大,道路内的车辆数量不断增大,导致车辆在信号灯路口前等待时间增多和交通环境趋于复杂所带来的随机慢化现象的增多,致使车辆在道路内的通行时间增多.根据平均耗时与出车概率等级的演化规律可以将出车概率大致分为三个区域.下面为方便表述,出车概率等级用P来表示.
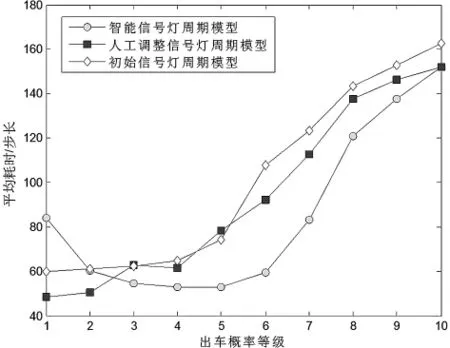
图2 三种模型在不同出车概率等级下平均耗时的关系
当P<3时,在较低的出车概率下,人工调整信号灯周期模型为最优模型,智能信号灯周期模型并不适用,由于出车概率比较小时,道路上车辆数目较少,本文设置的智能信号灯由于各个路口的信号灯转换速度快,因此反而会导致车辆的通行效率降低.
当3≤P≤5时,三个模型的车辆平均耗时相对比较平稳,这表明在此区间,随着车辆数目的增多,道路上车辆的通行效率保持稳定.同时由P=5时相对应的平均耗时可以看出智能信号灯周期模型相对于其他两个模型的优越性.
当P>5时,三个模型的车辆平均耗时与出车概率等级大致成正比.随着出车概率的增长,即道路上车辆密度的增加,道路上的车辆开始拥堵,智能信号灯周期模型与初始信号灯周期模型的平均耗时之间的差距开始减少,但相对于人工调整信号灯周期模型与初始信号灯周期模型之间平均耗时的关系,智能信号灯周期模型对于改善道路上车辆通行的效率还是比较明显.
3.3 论证高架桥模型的合理性
在城市发展后呈现的交通拥挤,同时又因建筑物密集导致难以拓宽的街道,造成了很多交通状况问题;以建造高架桥来疏散交通密度,提高运输速率成为大部分决策者的选择.目前在大学路口修建金凤路的直行高架桥,其他路口包括金凤路左转车道依旧存有信号灯控制系统.在此,我们模拟正在修建的金凤路直行高架桥,通过分析该模型与初始信号灯周期模型、人工调节信号灯周期模型、智能信号灯周期模型的关系,探究修建高架桥的可行性.
图3为高架桥模型与其他模型在平均耗时的关系图,高架桥模型在不同出车概率等级下的平均耗时均优于或等于其他模型的平均耗时.
当P<5时,即车流量在低谷期与平时之前的时候,相比较于其他三个模型,说明在该区间下的高架桥模型能够保证道路的畅通,不存在道路拥堵现象;当 5≤P<8时,高架桥模型同智能信号灯周期模型为最优模型,同时也表明智能红绿灯可以很大程度上缓解平时期的道路堵塞现象;当P≥8时,高架桥模型下的平均耗时显著低于智能信号灯周期模型及其他模型,相比较于智能信号灯周期模型,在道路上车流量大的时候,能够更大程度上改善高峰期道路上的拥堵现象.
高架桥模型相比初始信号灯周期模型、人工调节信号灯周期模型和智能信号灯周期模型具有更优良性能,能够极大地提高道路通行能力,降低平均耗时,故在大学路口修建高架桥,以期改善交通拥堵现状的方案具备一定的可行性和优越性.但在出车概率非高峰期下,仅通过调整信号灯周期,初始道路便能改善道路通行状况至高架桥模型的水平,说明信号灯周期时长对十字路口交通环境存在显著性影响.
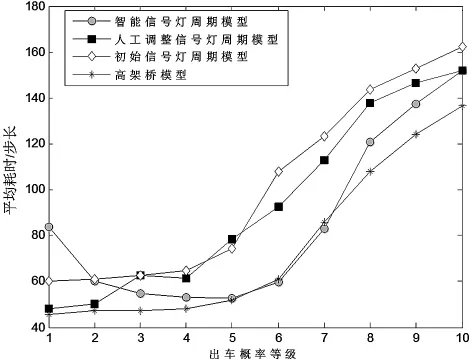
图3 四种模型在不同出车概率等级下平均耗时的关系
4 结论
本文探究了基于元胞自动机的十字路口交通流模型,采用Brockfeld等人对NaSch和BML耦合模型的优化规则和慢启动规则,分别建立了初始信号灯周期模型、人工调节信号灯周期模型、智能信号灯周期模型和高架桥模型,并运用于广东省汕头市大学路西港路口,对信号灯周期的配时及高架桥交通效益等问题进行了仿真实验,得出以下结论:1.高架桥模型能够极大地提升道路通行能力,改善交通效率,在西港路口修建高架桥具备理论上的可行性;2.信号灯周期时长对道路交通存在显著性影响,合适的信号灯周期时长能够在一定程度上改善交通环境;3.道路不同时期适用于不同的信号灯周期时长,信号灯周期需要一定的灵活性变化,以满足高低峰期不同的交通需求.
致谢:感谢汕头大学数学系李健老师的悉心指导.
[1]NAGELK,SCHRECKENBERGM.A cellular automaton model for freeway traffic[J].J Phys I France,1992,2:2221-2233.
[2]WANGR,RUSKINHJ.ModelingtrafficflowataSingle-laneurbanroundabout[J].ComputPhysCommun,2002,147(1/2):570-576.
[3]王俊骅,方守恩.路段行人-机动车冲突观测方法及冲突特性[J].同济大学学报(自然科学版),2008,36(4):503-507.
[4]袁绍欣,赵祥模,安毅生.无信号交叉口车流通行状况的混杂Petri网模型[J].中国公路学报,2010,23(1):93-97.
[5]TAKAYASUM,TAKAYASUH.1/f noise in a traffic model[J].Fractals,1993,1(4):860-866.
[6]杨晓光,陈白磊,彭国雄.行人交通控制信号设置方法研究[J].中国公路学报,2001,14(1):75-78+82.
[7]葛宏伟,王炜,陈学武,等.公交站点车辆停靠对信号交叉口进口道交通延误模型[J].东南大学学报(自然科学版),2006,36(6):1018-1023.
[8]BROCKFELD E,BARLOVIC R,SCHADSCHNEIDER A,et al.Optimizing traffic lights in a cellular automaton model for city traffic[J].Phys Rev E Stat Nonlin Soft Matter Phys,2001,64(2):056132.
[9]贾斌,高自友,李克平,等.基于元胞自动机的交通系统建模与模拟[M].北京:科学出版社,2007:58-60.
