脉冲负荷柴油发电机组特性研究
2018-03-10赵凡琪
吴 骏,庞 宇,赵凡琪
脉冲负荷柴油发电机组特性研究
吴 骏,庞 宇,赵凡琪
(中国船舶及海洋研究工程设计研究院,上海 200011)
脉冲负荷船上给系统电能质量带来极大的影响,甚至会威胁到船舶电力系统安全、稳定的运行。本文对含有大功率脉冲性负荷(雷达)的测量船上的柴油发电机组工作特性进行研究和分析,找到调速器介入前后,转速跌落、恢复的规律和稳态过程转速的变化率,从而得出利用柴油发电机组固有的机械储能来平抑负荷功率波动的量化标准,形成系统、理论的工程总结。
脉冲性负荷 柴油发电机组 电能质量 船舶综合电力系统
0 引言
综合电力系统(integrated power system)是船舶电力系统未来发展的趋势,它将电能的生产、输送、变换和分配进行集成,实现船舶推进和满足通信系统、导航系统等船舶负荷的用电需求,并进行合理的能量管理和负荷自动控制[1]。电力电子设备的增多,非线性电力负荷对船舶电能质量造成严重影响[3,4],特别是高能功率武器、雷达等呈现的周期脉冲性瞬态特性明显,因其特殊的能量需求和运行特性,给系统的稳定运行带来了新的挑战,也给船舶电力系统的发展带来机遇。
国内许多大学和研究所已经对脉冲负荷柴油发电机组展开了研究,在脉冲性负荷大幅波动而又需要保证较高供电品质的应用场合下,改善机组调速率,优化供电频率和电压,并减少波动负荷对系统造成的不良影响。文献[5,6]对影响机组性能的柴油机功率确定、储能飞轮设计、调速系统的性能匹配以及增压器匹配设计等因素进行了研究。文献[7]建立了脉冲负荷柴油发电机组的仿真模型,分析了机组宏观性能参数的动态特性,还从微观上描述柴油机的动态热力过程。文献[8]通过理论分析模型和虚拟样机模型分别对机组轴系在柴油机输出扭矩和脉冲扭矩下的动态特性进行分析,为机组优化设计奠定基础。文献[9]对比分析了机组的调速器特性、飞轮惯量、压缩空气补气等多种方案,认为压缩空气补气方案对负荷响应性能的改进最有效。
本文对柴油发电机组的转轴的动态特性进行研究,分析负荷波动下机组的三个过程(调速器介入前后阶段,稳态阶段)转速的变化率,为实际工程案例中机组选择和配置提供理论依据。
1 测量船雷达供电机组的设计输入
1.1脉冲性负荷运行特性
大型电力电子设备和电动机械装置的迅猛发展促使了脉冲能量及新型储能装置的研发。脉冲能量的需求在数十kJ到几千MJ之间,而瞬时功率基本都是MW级以上的。脉冲负荷种类很多,有激光武器、电磁弹射、雷达等。本文的脉冲性负荷为雷达。
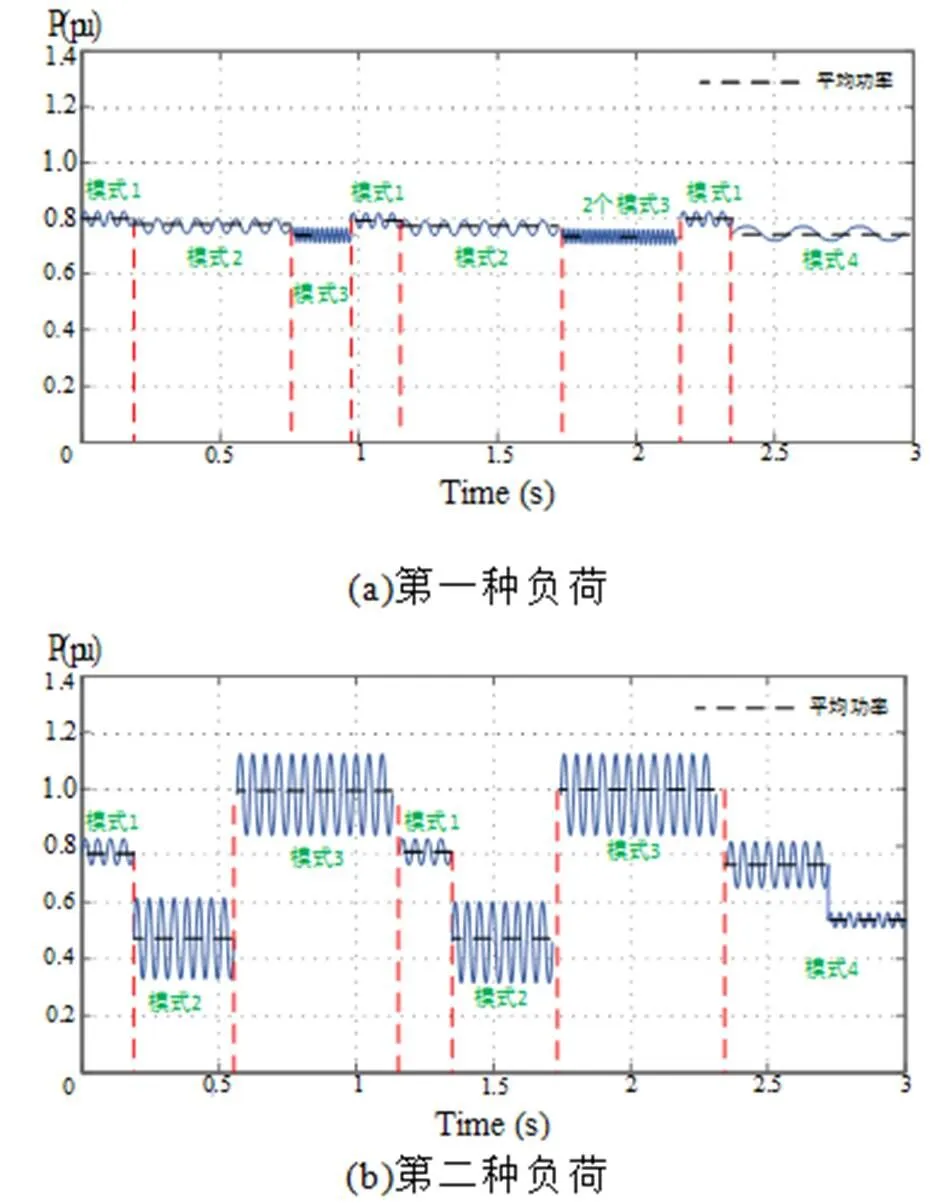
图1 不同雷达负荷的功率特性对比
由于以往雷达电源大多是采用陆上电网,容量很大,而雷达功率一般在1 MW以下,由电网直接承受脉冲功率。以往含雷达的船舶电力系统中,雷达功率与发电机功率比都较小,因此脉冲负荷的影响没有特别凸显,而船舶电力系统容量相对较小,船舶上使用MW以上的大型雷达案例不多,也出现过影响发电机频率导致发电机组无法并网的情况。
雷达是一种高频脉冲性负荷,根据其外特性(功率波动情况)可分为两种,第一种负荷不同工作模式下的平均功率变化不大,可等效为稳恒负荷,而另一种则由于工作性能特殊,负荷功率波动的周期和占空比都是不确定的,且平均功率变化很大,不能等效为稳恒负荷。不同特性的雷达负荷,系统解决方法不一样,因为柴油发电机的转轴具有转动惯量,会对电磁功率的波动起到阻尼的作用,故工程上多利用柴油发电机固有的机械储能来平抑第一种负荷的功率波动。本文针对的是第一种负荷进行研究,另一种负荷则需要电容储能来解决,具体系统设计和参数计算将后续文章中研究。
雷达的典型工作模式见表1,当雷达T/R组件工作在大脉宽小工作比情况下,将导致雷达系统输入的供电功率出现高频的功率波动,严重影响发电机组正常工作,因而雷达运行时会避免使用小脉宽大工作比模式。需要说明的是为了减小负荷对系统的影响,其供电装置中已包含了滤波单元和储能电容,图2为雷达其中一个模块的典型工作模式下的功率波动情况,单位:kW。
表1 典型雷达工作模式


图2不同工作模式下雷达功率波动情况
雷达系统中包括高频舱、水冷等稳定用电负荷和造成功率波动的阵面负荷,从上图可以看出该类雷达外特性(功率波动情况)为一个周期内的功率在稳定值附近波动,因而可视为稳恒负荷。
文献[2]认为脉冲负载柴油发电机组的工作特性是:负载在空载和带载间周期性波动,机组大部分时间运行在动态过程中,载荷幅度有时甚至超过机组额定负荷。实际上,脉冲负荷机组的负载范围不只是在“空载”和“带载”间波动,也可能是在低负荷和高负荷状态下波动。低负荷可能是空载、较低负载,甚至出现机组负载倒拖;高负荷可能是机组额定负载内的较高负载,也可能远远高出额定负荷,比如短时持续高负荷。
为研究雷达供电柴油发电机组调速性能、发电机调压性能是否解决负荷的功率变化问题,重点考虑两种工况:
1)突加最恶工况(在1.2 MW稳定负荷下,突加4.25 MW负荷,同时有±0.2 MW的负荷波动,波动周期15 ms。负荷总用电5.45 MW,波动范围5.25~5.65 MW),如图3所示;
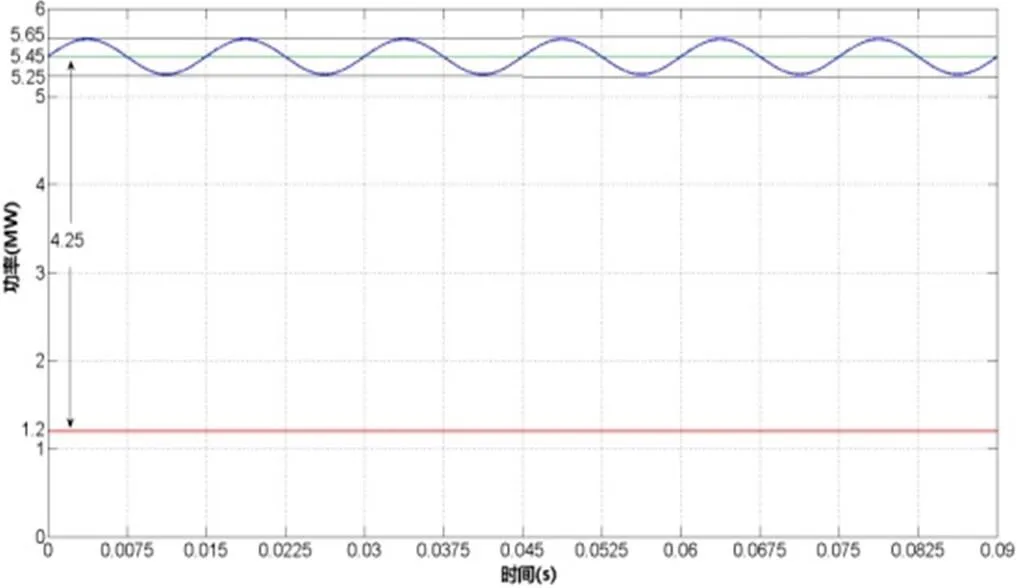
图3 突加最恶工况的阵面负荷情况
2)波动最恶工况(在1.17 MW稳定负荷下,突加2.43 MW负荷,同时有±1.875 MW的负荷波动,波动周期33 ms。负荷总用电3.6 MW,波动范围1.72~5.47 MW),如图4所示。
1.2系统组成
电站配置6台5.8 MVA发电机组,雷达电源连接于交流6.6 kV电网。雷达工况下,3台机组为雷达提供电能(即脉冲负荷柴油发电机),1台机组供给日用负荷,1台机组供给推进负荷,系统如图5所示。雷达阵面最大耗能5 MW,由五个电源模块供电,阵面由直流供电,电压额定值520 V,直流电压波动范围为+6%~-10%。

图4 波动最恶工况的阵面负荷情况
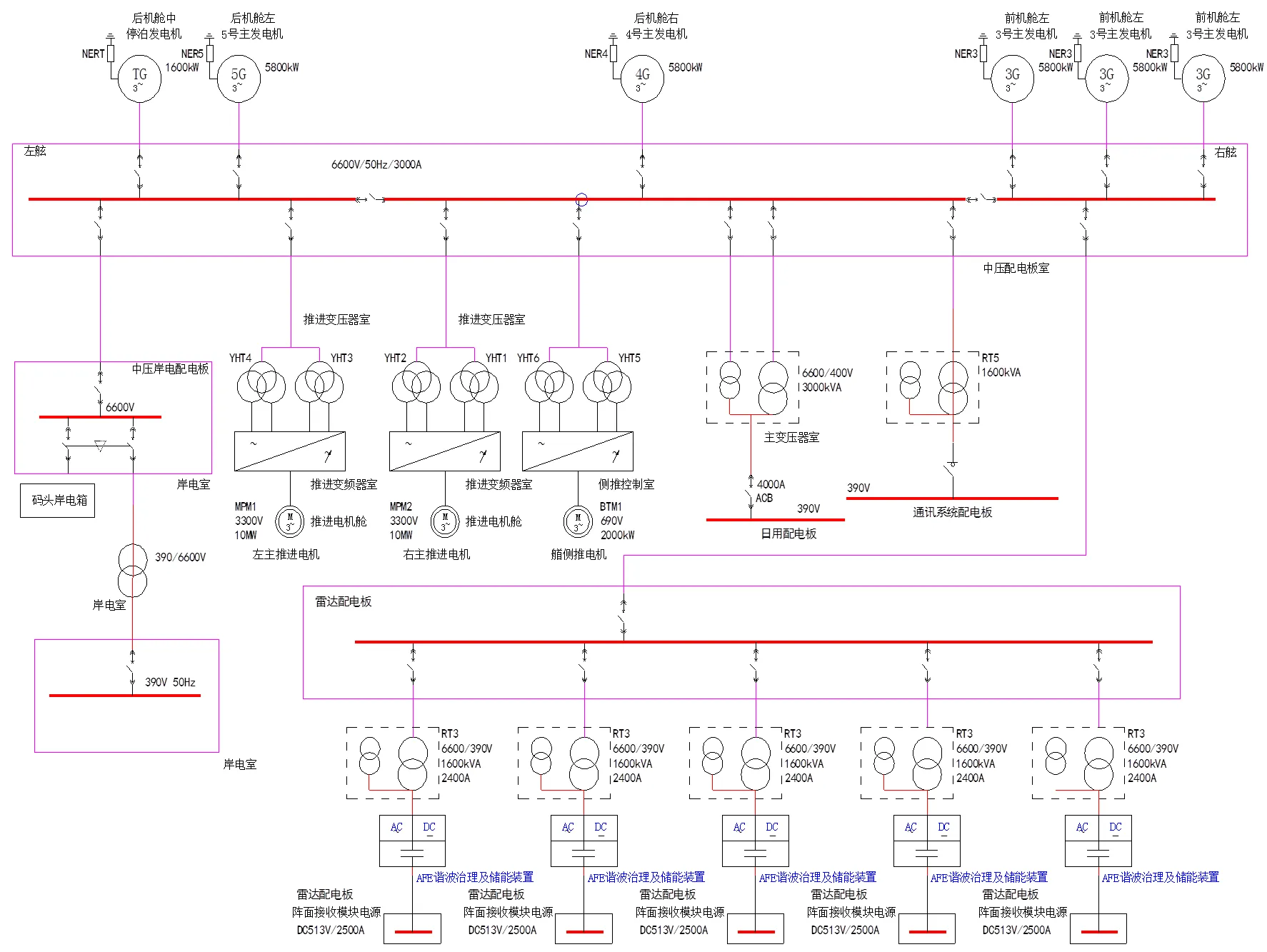
图5 测量船电力系统单线图
2 柴油发电机组动态特性理论分析
以转轴为分析对象,理论推导在不同负荷情况下的转轴角速度波动情况。
2.1转矩方程与转轴角速度变化的关系
根据转矩方程,机组转轴上的转矩之和构成了角速度的变化,如下式(1)所示[10]。
旋转运动中的功率定义为转矩及角速度之积,如(2)所示。

联立式(1)及式(2)可得转轴上的功率之和及角速度变化的关系式,如式(3)所示。

转轴上功率之和为原动机提供的机械功率及发电机转换的电磁功率,如式(4)所示。
在稳定状态时机械功率及电磁功率相抵,转速保持稳定,如式(5)所示。
暂态时两者的此消彼长则构成角速度变化,如式(6)所示。

联立式(5)及式(6)可知,自稳定状态变化,机械功率及电磁功率的增量共同构成角速度变化,如式(7)所示。
考虑到电磁功率的变化可认为是瞬时的,而原动机输出的机械功率变化存在响应时间,在机组调速器来不及响应使得暂时处于供油量不变的情况下,ΔP=0。阵面负载的所需的电磁功率变化如下图6所示,其中A为波动幅值,B为突加功率缺口,为波动周期。
根据图6,阵面负载所消耗电磁功率可用式(8)表示,其中ω为波动频率。

将机械功率变化量ΔP=0及电磁功率变化量带入转矩方程式(7)可得原动机调速执行机构更变油量前角速度波动表达式。


图6 阵面负载突加示意图
整理后得到关于角速度的微分方程。
对上式积分一次可得:

2.1机组三个过程中转速变化情况
2.2.1调速执行机构介入前的转速跌落
初始状态时,调速机构尚未介入工作,故此时消耗转轴动能转化为电磁功率,转轴作纯减速状态,继续按式(12)计算,该式持续时间取决于油门的响应速度及调速器的控制时间。经延时后,调速机构介入工作更变油门供油,转入下一阶段。
式(12)中的有关机组的参数均是有典型值的,而关于阵面负载的参数又是已知,因此可作初步理论计算。通过调整机组转动惯量及额定转速可以改变调速执行机构介入前转速跌落的特性,如图7所示。即单台机组转动惯量越大,或并联机组数量越多,或增加机组的额定转速可使转速下降减缓,使暂态特性变好。
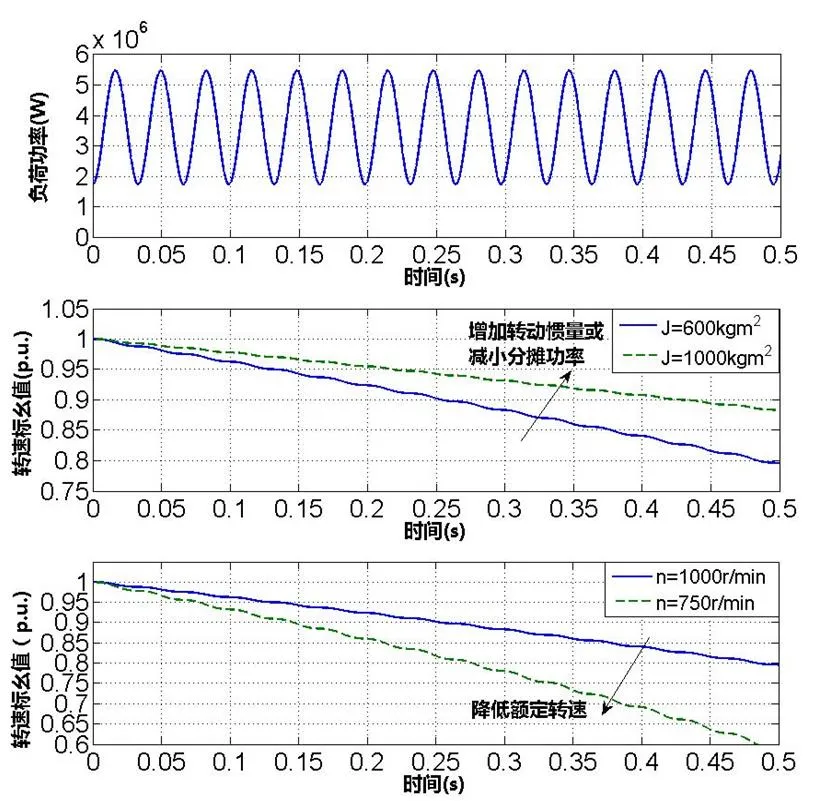
图7 调速执行机构介入前转速跌落示意图
通过图7另外可知,在突加上增加的波动分量对突加行为不产生重大影响,仅在原始突加波形上增加了抖动,但总体趋势不变,故不会影响调速器作用,突加阵面负载的特性可以近似为突加。
2.2.2调速执行机构介入后的过渡过程
过渡态时,调速机构介入工作,油门供油量改变,增加项G(t)表示速器执行机构更变油门起所产生的机械能累计量。则式(12)可修正为在整个调速过程中的普适表达式(13)。但由于G()不能用解析式表示,故式(13)仅可用作定性分析。

开始加油门后,G(t)>0,转速跌落开始缓解,当()>·后,新增的机械能超过了突加电磁功率,转速开始止降回升。此过程中,转速变化量会对转速检测产生影响,但总体趋势不变。
2.2.3进入稳态后的转速波动
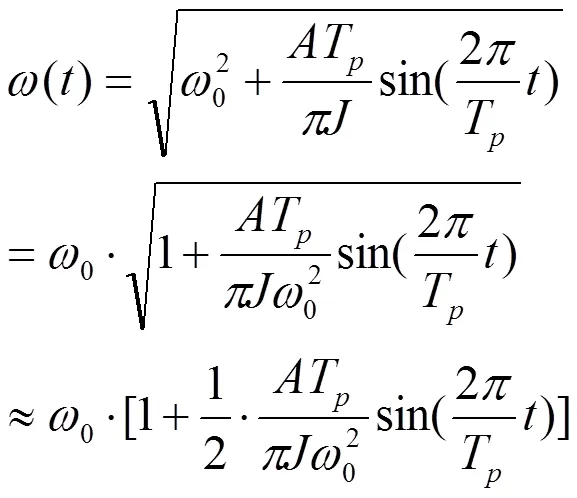
稳态时,油门恒定,新增的油量产生的功率与稳态增加量相抵,式(12)中第三项、第四项消失,第二项功率波动项使角速度发生周期变化,式(12)变为:
对式(14)稍作化简,将角速度按泰勒级数在=0处一阶展开可得:


由式(19)可知角速度变化率的上界max与波动幅度、波动周期T成正比,与转动惯量、机组额定转速平方成反比。即:
1)轴系转动惯量越大,变化率越小。
2)波动幅值越大,变化率越大。
3)波动周期T越快,变化率越小。此因为可计算每个波动周期内的加速面积与减速面积。在加速面积内做正功,所做正功因恰为能量守恒。
4)额定转速越大,角速度变化率越小。但一般高速机的转动惯量较小,故两者相互矛盾,应综合计算具体机型的2以对比性能。
3 工况分析及其仿真
在柴油发电机组动态特性理论分析基础上,对1.1节中提到的两种工况进行具体计算分析。
3.1工况1—突加最恶工况
参数输入汇总如表2所示:
表2 工况1参数输入
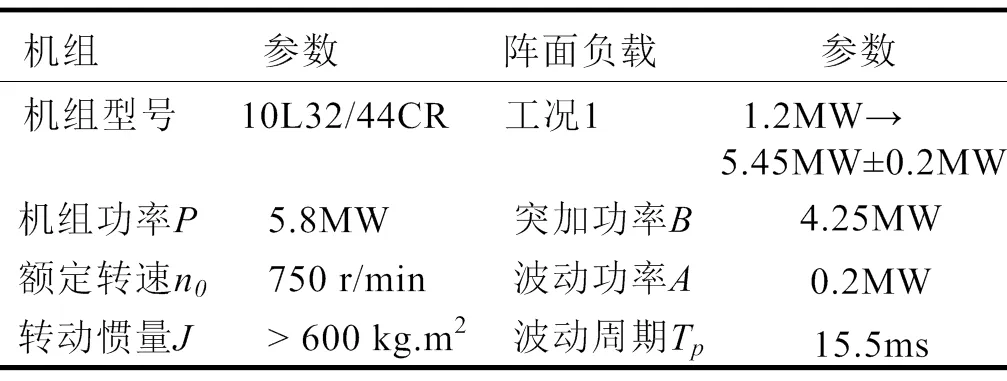
由第2节分析可知投入阵面可近似为突加负荷,波动对此基本无显著影响。
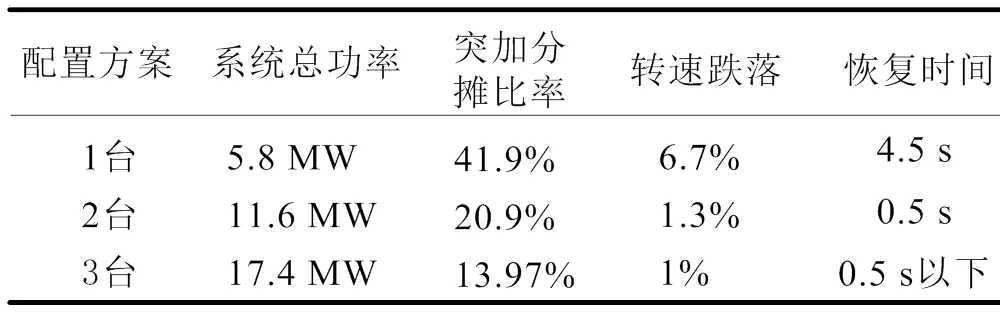
原动机厂提供的输入如图8所示,根据图8可计算突加负载的转速跌落,如下表3所示。
再根据第2节的分析,求取稳态时单台机的转速变化率计算。根据式(14)和式(18)可计算单机时的转速变化率计算,10L32/CR的额定转速为750 r/min合78.5 rad/s。

图8 10L32/44CR本体调速特性
表3 不同机组配置方案突加4.25 MW的转速变化情况

合 750.1 r/min
对于多台机的情况,2台机则波动功率A减小一半,3台机A减小为三分之一。根据理论计算结果,2台机以上带阵面负载工况1可满足突加时的转速特性,变化率可忽略不计。
3.2工况2—波动最恶工况
参数输入汇总如表4所示:
表4 工况2参数输入
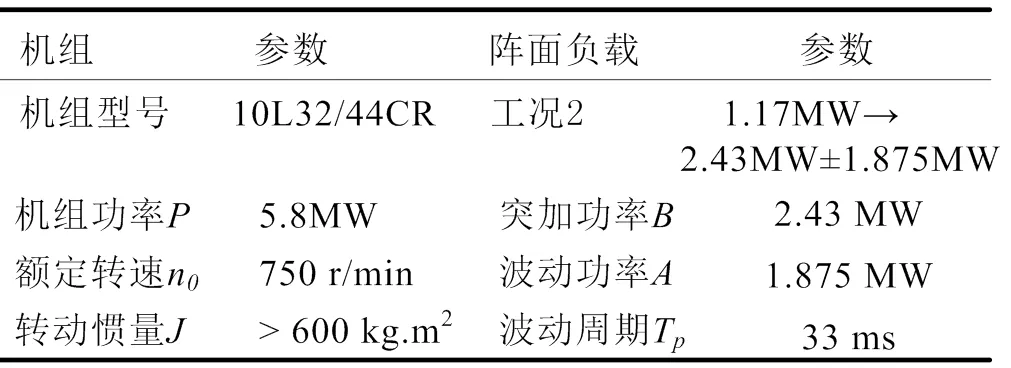
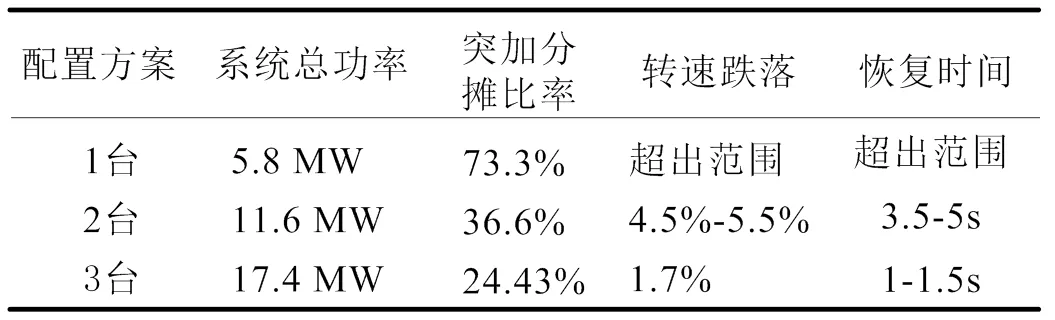
根据图8可计算突加负载时的转速跌落,如下表5所示。
表5 不同机组配置方案突加2.43 MW的转速变化情况
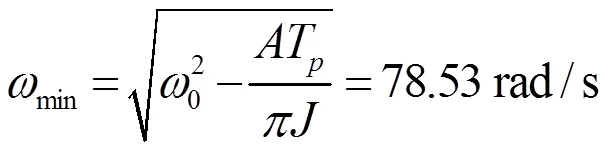
再根据第2节的分析,求取稳态时单台机的转速变化率计算。根据式(14)和(18)可计算单机时的转速变化率计算,10L32/CR的额定转速为750 r/min合78.5 rad/s。
合 752 r/min

对于多台机的情况,2台机则波动功率A减小一半,3台机A减小为三分之一。此种工况由于功率波动较大,在理论计算基础上进行了基于Simulink的建模仿真复核,如图9所示。仿真计算结果的角速度变化率为0.29%,与理论计算值基本相近。
值得关注的是图9中的第5副子图的瞬时电流,注意到电流幅值波动的包络线即图9第4幅的波动功率。在此种情况下,系统电流会产生较大的分数次谐波,谐波源波动负荷,流通路径为自波动负荷流向供电机组,为需要注意分数次谐波对其它设备(尤其是继保装置)的影响。
总之,在此种工况下,1台机带阵面负载工况2可满足突加时的转速特性,转速变化率的理论计算值及仿真值也在允许范围内。从仿真结果同时可知,系统电压特性也满足指标要求。
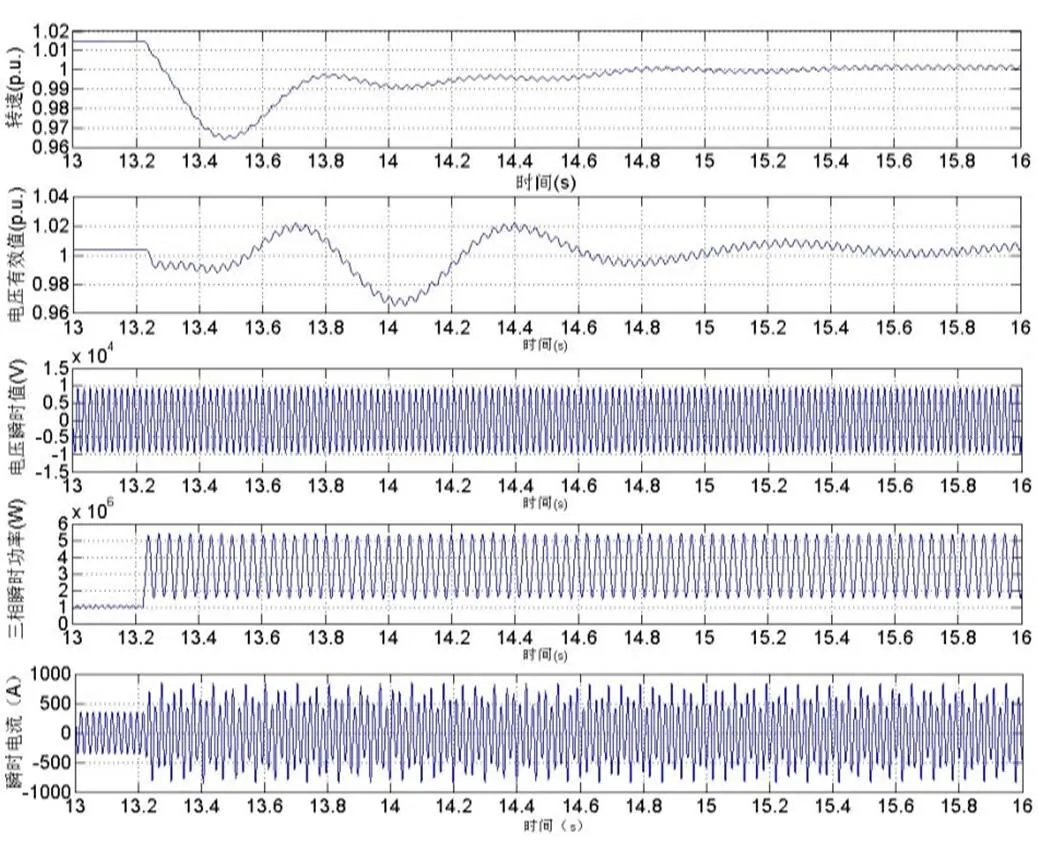
图9 工况2下单机组投入波动负荷的电力系统状态
4 结论
本文根据功率特性将脉冲性负荷雷达分成了两类,指出了不同种类负荷的解决方法。其中,第一种平均功率变化不大可等效为恒稳负荷,采用柴油发电机组固有的机械储能来平抑其功率波动。对测量船上为大功率雷达供电的柴油发电机组的转轴动态特性进行了分析研究,理论推导调速器介入前后,转速跌落、恢复的规律和稳态过程转速的变化率,得到下述结论:
1)暂态、调速器介入前,角速度跌落按式(12)定量计算,额定转速越高、转动惯量越大,对转速特性越有利。跌落过程等效于突加负载B。
2)暂态、调速器介入工作后,角速度恢复的过程按式(13)定性分析。
3)稳态时,角速度变化率的定量计算以式(14)求解,按式(19)进行定性分析。角速度变化率的上界max与电磁功率波动幅度、波动周期T成正比,与转动惯量、机组额定转速平方成反比。
在理论分析基础上本文针对测量船雷达实际工况下负荷的特点,计算出所配置柴油发电机组的容量及其性能指标,并通过仿真验证了理论推导的正确性。为用柴油发电机组固有的机械储能来平抑此类型脉冲性负荷功率波动的提供量化标准,形成系统、理论的工程总结。
[1] 马伟明.舰船动力发展的方向-综合电力系统[J].海军工程大学学报, 2002, 14(6): 5-8.
[2] 寿海明, 冀路明, 回志澎. 船舶电力系统的电能质量问题[J]. 船电技术, 2006, 26(6): 19-21.
[3] 许晓彦. 船舶多模式电站与船舶电网电能质量研究[D]. 上海海事大学, 2007.
[4] Cogliolo A. Sustainable shipping green innovation for the marine industry[J]. Rendiconti Lincei, 2015, 26(1): 65-72.
[5] 袁利国, 曾凡明, 沈兵, 等. 脉冲负载柴油发电机组的设计及试验研究[J]. 武汉理工大学学报(交通科学与工程版), 2010, 34(1): 158-161.
[6] 邢广笑, 曾凡明, 袁利国. 涡轮增压柴油机在脉冲负载下的瞬态特性仿真与试验研究[J]. 船海工程, 2010, 39(2): 89-92.
[7] 赵同宾, 陈金涛, 王丽杰,等. 脉冲负荷柴油发电机组仿真与试验[J]. 舰船科学技术, 2010, 32(8): 37-43.
[8] 李天水, 曾凡明, 蔡耀全. 脉冲柴油发电机组轴系动态特性分析[J]. 舰船科学技术, 2012, 34(12): 55-58.
[9] 王世明, 王德山, 崔毅, 等. 改进柴油机脉冲负荷响应性能的多方案分析[C]. 全国大功率柴油机学术年会. 2007.
[10] Li T, Zeng F, Qin J. Research on virtual prototyping technology for pulse diesel generator[C]. Second International Conference on Electric Information and Control Engineering. IEEE Computer Society, 2012: 1431-1434.
Characteristics Analysis of Diesel Generating Set under Pulsed Load
Wu Jun, Pang Yu, Zhao Fanqi
(1. Marine Design & Research Institute of China, Shanghai 200011, China)
U664.121
A
1003-4862(2018)02-0050-07
2017-11-20
吴骏(1981-),男,高级工程师。研究方向:船舶电力系统。15114670286@163.com
