基于深度和彩色双信息特征源的Kinect植物图像拼接
2018-03-10朱嘉慧
沈 跃,朱嘉慧,刘 慧※,孙 力
0 引 言
近年来,随着计算机视觉技术的发展,图像拼接已逐渐成为计算视觉模拟[1]、图像处理[2-3]以及虚拟现实[4]等研究的热点和关键技术,并广泛应用于军事、航空、地质、医学、通信等多个领域[5-6]。随着农业智能化的进一步发展,图像拼接在农业果实植株的检测、田间管理、农用机器人导航等方面起到了重要的作用[7-8]。马晓丹等[9]提出了一种重建苹果树冠层器官三维形态的图像拼接方法,初步实现对苹果树年生长期的冠层器官相邻区域强度图像与彩色图像的拼接,但是没有精确识别单株冠层区域,且未能消除复杂背景。周志艳等[10]提出基于图像像素灰度值标准差标准化的方法,改进 Harris角点检测算法,对水稻低空遥感图像进行配准与拼接方法,有效提高了角点检测算法的稳定性和图像拼接的精度,实现了同尺度条件下的图像配准和拼接,但是对于不同尺度的图像拼接还未验证。姚立健等[11]提出基于尺度不变特征转换算子的水果表面图像拼接方法,其具有一定的尺度、旋转以及仿射变换不变性,适用于随机呈现的不同姿态球状水果图像拼接,但是其对于水果表面纹理特征不是特别明显的水果不能适用,有一定的局限性。
为了改善图像拼接的效果,本文采用可采集彩色信息和深度信息的Kinect传感器获取图像。Kinect V2获取数据的稳定性相对较好、细节更多;被其他环境光源(红外线)影响的概率也更低,可以承受一定程度的日光。文献[12]对 Kinect获取的玉米及茄子的三维点云数据进行去噪试验,去除不同尺度的噪声,保留边缘数据的完整性,获得良好的植物三维点云数据。文献[13]对Kinect深度传感器的采集到的点云数据进行图像拼接,完成了点云数据的拼接,但其无法达到自然过渡的效果。已有研究表明,Kinect深度相机在被测对象深度数据采集和处理方面具有明显优势,但是仅考虑了单帧图像或图像序列,在图像拼接的数据处理中并未过多涉及。
因此,本文在前人研究的基础上,应用Kinect二代传感器获取彩色图像和植株三维数据,在进行特征点匹配对筛选的过程中,提出采用左右位置深度距离不变的方法去除误匹配,通过RANSAC算法寻找左右2幅图最佳投影变换矩阵 H,再利用最佳缝合线算法对待拼接图像进行融合,从而获取空间整体目标图像。该研究对采用农业车载Kinect深度传感器进行基于深度和彩色双信息特征源的图像拼接以及农业中相关控制决策提供重要的指导意义。
1 试验材料和方法
1.1 Kinect植株图像数据采集平台
为了验证图像拼接方法的准确性,搭建了一个图像采集平台,如图1所示,包括Kinect深度传感器、PC机、相机支架、滑台以及待测植株。待测植株距Kinect传感器大约1.5 m。Kinect传感器固定于相机支架或滑台上,通过USB延长线接口连至PC机。用MATLAB获取植株的彩色图像和深度距离信息,继而进行图像拼接。

图1 Kinect传感器图像采集平台Fig.1 Image acquisition using Kinect platform
微软开发的Kinect二代三维深度体感设备作为传感器,其垂直方向可视角度为 60°,水平方向可视角度为70°,有效视野范围为0.8~4.0 m,其获取的彩色图像分辨率为1 920×1 080。Kinect采用TOF获取空间的深度数据信息[13-14]和彩色图像信息。红外发射器和红外线接收器采用TOF技术可获得物体的空间位置信息。RGB摄像头可以获得场景的彩色图像。为保证数据的精度与完整性,先经过预备试验,设备与植株相距1.5 m左右,通过MATLAB获取Kinect得到的植株三维数据,采集10帧三维坐标数据,并存储为.txt文档,用于后续处理。
1.2 植株彩色图像初匹配
1.2.1 SIFT特征点提取
关键点的检测不仅可以最大程度地表达彩色图像中的特征,还可以大幅度地减少后期特征点匹配的数量,提高特征点匹配的快速性和准确性[15-17]。SIFT关键点检测算法能够从图像中提取出对图像缩放、平移、旋转不变的特征点,并且对于光照、仿射和投影变换也有一定的不变性,是一种非常优秀的局部特征描述算法[18-21]。尺度空间极值点检测采用层叠式滤波的方法,应用带有不同σ的高斯函数对图像进行处理,图像尺度空间[21-24]定义为

式中(x,y)为像素位置,G为高斯函数,I为原图像,L为卷积函数,σ为尺度空间因子,k为常数。
检测到的极值点作为候选点,对位置、尺度、弯曲度等做拟合,剔除那些低对比度和定位差的边缘点,同时对尺度空间函数 F ( x ,y,σ)运用 Taylor展开得到彩色图像匹配关键点[25-26]。
SIFT算法提取到的特征点描述子如图2所示。图中的白色箭头表示提取到的特征点描述子,具有位置、尺度和方向 3个信息,白色箭头尾部所在位置代表特征点位置,箭头的长度代表其尺度,特征点方向为箭头指向的方向。

图2 SIFT算法提取到的特征点Fig.2 Feature points extracted by SIFT algorithm
1.2.2 相似性度量特征点匹配
本文采用算法简单实现效率高的欧氏距离作为 2幅图中的相似度量[27]。
取1幅图像中的某个关键点,并找出其与另1幅图像中距离最近的前2个关键点,在这2个关键点中,如果最近的距离与次近距离的比值ratio小于某个阈值T,则接受这 1对匹配点[28]。由于特征空间的高维性,相似的距离可能有大量其他的错误匹配,从而它的ratio值比较高。显然降低这个比例阈值 T,SIFT匹配点数目会减少,但更加稳定,反之,若比例阈值T较高,SIFT匹配点数目增多,但是会存在很多的误匹配。经多次试验,在本文的实现算法中,取阈值T为0.6时,试验效果较好,存在的误匹配较少。
1.3 Kinect深度信息误匹配消除
通过相似性度量得到潜在匹配对,其中不可避免会产生一些错误匹配,大量的误匹配对图像拼接的效果会产生很大的影响,如缺失、错位等。因此需要根据集合限制和其他附加约束消除错误匹配,提高鲁棒性。
将 1.1节中读取到的每个像素点的三维数据赋值给彩色图像中对应的像素点,此时,每个像素点均具有彩色信息和深度距离信息,再根据深度距离不变来筛选误匹配。在1.1节的图1中,2幅待拼接植株图像是Kinect V2传感器沿水平(X轴)纯平移移动相继拍摄得到。点 P表示植株上的某一点,Kinect传感器仅进行水平平移,b表示水平平移的距离,平移前后左右位置的坐标系分别为Ol和Or,P点在坐标系Ol和Or中坐标分别为
即在Kinect传感器仅进行水平平移的情况下,P点的深度距离没有发生变化。
所以在这2个不同位置下,Kinect拍摄到的植株的深度距离相同。因此可以根据Kinect获得的2个不同位置待测植株的深度距离信息消除误匹配。

式(2)中,若匹配到的2个特征点深度距离相同,则保留此匹配;若匹配到的 2个特征点深度距离不同,则去除该匹配。由此得到的匹配对正确率较高。
1.4 RANSAC算法寻找最佳单应性矩阵
单应性矩阵描述的是针对同一事物,在不同的视角下拍摄的2幅图像之间的关系。为了得到Kinect传感器在不同位置的2幅图像之间的变换关系,采用RANSAC算法来寻找一个最佳单应性矩阵H[29]。
随机抽样一致性RANSAC(random sample consensus)算法[30-31]能简单、有效的去除噪声影响,其采用迭代的方式从 1组包含离群的被观测数据中估算出数学模型的参数。与普通的去噪算法不同,RANSAC算法是使用尽可能少的点来估计模型参数,然后尽可能的扩大得到的模型参数的影响范围[32]。RANSAC算法的基本假设是样本中包含正确数据(inliers,可以被模型描述的数据),也包含异常数据(outliers,偏离正常范围很远、无法适应数学模型的数据),即数据集中含有噪声[33]。在经过上述基于深度信息筛选后的特征点匹配对中存在正确匹配,也存在少量的异常匹配,这些异常匹配可能是由于错误的测量、环境因素、错误的计算等产生的。此算法最终确定的模型中局内点(即正确匹配)与所有点(即总匹配对数)的百分比即为匹配准确率。若未进行基于深度信息的特征点筛选这一步骤,得到的异常匹配较多,经过RANSAC算法后得到的数学模型准确率低,单应性矩阵H存在误差。
1.5 最佳缝合线算法图像融合
图像融合以图像配准为基础,对拼接后的图像消除图像间差异,使得拼接后的图像能自然平滑过渡。图像融合的传统方法有梯度金字塔、渐入渐出算法[34]等,但它们会使图像存在很明显的带状感觉或存在重影现象,而最佳缝合线算法[35]能很好解决此问题。因此本文使用最佳缝合线算法进行图像拼接。
在 2幅图像重叠区域的差值图像上,颜色、结构强度差值最小的一条线被称为理想的缝合线。2幅原始图像上重叠像素点的结构差值是通过修改梯度计算 Sobel算子[36]实现。利用 Sobel算子进行梯度计算时,计算在 x方向和y方向的梯度分别采用模板Sx和Sy。

由投影变换矩阵H可以得到2幅图像上Kinect传感器水平平移的像素量,2个位置的坐标系归一化到同一个坐标系中,将 2幅图像重叠的部分作差运算生成一幅差值图像;然后对此差值图像运用动态规划的思想从重叠区域的第一行出发,建立以该行上每一个像素为起点的缝合线,然后从这些缝合线中寻找一个最佳的缝合线。
1.6 改进的基于深度和彩色双信息特征源的 Kinect图像拼接
本研究基于深度和彩色双信息特征源的图像无缝拼接流程图如图3所示。

图3 深度和彩色双信息特征源的图像无缝拼接流程图Fig.3 Image seamless mosaics flow chat of depth and color double source feature information
首先,基于植株的特征信息对彩色图像利用尺度不变特征变换(scale-invariant feature transforms,SIFT)进行关键点搜索,得到均匀且具有标志性的关键点。然后采用相似性度量的方法对 2幅图像得到的关键点进行特征点匹配。针对匹配对中存在大量的误匹配,利用 2幅图像的深度距离不变性消除误匹配,根据得到的正确匹配对采用RANSAC算法寻求2幅图之间的最佳投影变换矩阵H。最后根据投影变换矩阵H使用最佳缝合线算法对2幅图像进行图像融合,最终实现了图像的精确拼接。而传统基于SIFT算法的图像拼接方法没有利用图像的深度距离消除误匹配这一步骤,因此特征点匹配准确率较低,拼接后图像不够理想。
2 结果与分析
为了验证本文方法的有效性和实用性,设计了室内与室外2个试验,每个试验重复50次,每次拍摄不同角度的3张图像。
2.1 室内试验及分析
室内拼接试验采用仿真绿色植株作为待拼接对象,室内试验场地如图4所示:

图4 室内试验场景图Fig.4 Indoor experimental scene
在一个6 m长的匀速运动同步带滑台检测平台上进行试验,Kinect传感器固定在同步带滑台的运动滑块上,距离地面高度1.5 m。多株绿色植株目标与试验滑台的水平距离为1.5 m。当运动滑块以0.5 m/s速度匀速前进时,携带 Kinect传感器以同样速度移动,通过 Matlab调用Kinect每隔0.6 s获取1次植株彩色图像和深度距离信息并保存。顺序抽取3个连续时间点获取的3张彩色图像作为待拼接图像,如图5所示。

图5 植株彩色原始图像Fig.5 Original color image of plant
图5 中角度1、角度2、角度3表示传感器和植株的连线与滑台滑块运动方向的夹角(≤90°),角度1和角度3均为81.5°,角度2为90°。
对采集到的彩色图像和三维数据分别用传统的基于SIFT算法的图像拼接方法和本文改进后加入深度信息的拼接方法进行处理,根据相似性度量的方法得到特征点匹配对193对,将Kinect相机获得的深度距离信息加入到彩色图像中,基于深度信息共消除误匹配对165对,2种方法的投影变换矩阵分别为:

H1和H2是采用传统基于SIFT方法得到的角度1到角度2,角度2到角度3的投影变换矩阵;
图6是分别使用2种方法的试验效果对比图。
图6a是采用传统的基于SIFT算法得到的拼接效果,通过 Matlab的计时函数 tic和 toc即可统计出拼接耗时13.04 s,匹配准确率为88.1%(见表1),图中方框标示处即为与本文方法拼接效果图的区别所在,从标示处可以看出采用传统基于SIFT算法的图像拼接方法植株叶片有明显的重影。图6b是根据深度距离不变性去除误匹配后拼接得到的效果图,耗时9.70 s,匹配准确率为92.9%,比传统方法准确率提高了4.8%,图像过渡平滑,重影得到明显的改善。因此,本文提出的基于深度和彩色双信息特征源的 Kinect图像无缝拼接方法耗时较短,拼接效果好,在进行室内图像拼接时具有明显的优势。

图6 室内试验图像拼接对比Fig.6 Image mosaic comparison of indoor test
2.2 室外试验及分析
室外拼接试验在江苏大学植株培育基地进行,采用绿色植株,试验时间为下午 4点,有微风,室外试验用电瓶以及电压转换器对Kinect传感器进行供电,室外试验场地和原始图像如图7所示。

图7 室外试验和采集的原始图像Fig.7 Outdoor experiment and original images collected
通过Matlab将Kinect相机获取的彩色图像和深度距离信息保存,获取的深度信息以.txt形式保存。
对采集到的彩色图像和三维数据分别用传统的基于SIFT算法的图像拼接方法和本文改进后加入深度信息的拼接方法进行处理,由于室外试验背景较为复杂,存在很多干扰,所以相似性度量的方法得到特征点匹配对较多,共2 289对,将Kinect相机获得的深度距离信息加入到彩色图像中,基于深度信息共消除误匹配对1 098对,2种方法的投影变换矩阵分别为:

H1和H2是采用传统基于SIFT方法得到的角度1到角度2,角度2到角度3的投影变换矩阵;
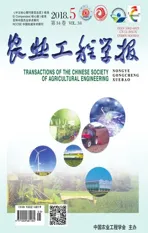
图8是分别采用2种方法的试验效果对比图。
图8 传统SIFT算法与本文方法图像拼接效果对比Fig.8 Image mosaic effect comparison of traditional method based on SIFT algorithm and method in paper
图8 a是采用传统基于SIFT算法的图像拼接效果图,耗时77.67 s,匹配准确率为92.1%(见表1),图中圆圈标注处即为与本文方法拼接效果图的区别所在,从标示处可以看出采用传统基于SIFT算法的图像拼接方法重影较为明显。图8b是根据深度距离不变性去除误匹配后拼接得到的效果图,耗时71.15 s,匹配准确率为99.1%,比传统方法准确率提高了7.0%,图像过渡平滑,没有重影等情况。
传统基于SIFT的拼接方法和本文拼接方法对比分析如表1所示,室内外试验中本文方法拼接时间相对较短,实用性更强。室内外试验中本文算法图像拼接匹配准确率平均提高了5.9%,说明本文方法得到的投影变换矩阵H更为准确,即所取的特征点匹配对准确率较高,所以本文的方法图像拼接没有重影、亮暗差异、缺失等拼接错误。

表1 传统SIFT算法和本文拼接方法对比Table 1 Comparison of traditional method based on SIFT algorithm and method in paper
3 结 论
本文针对Kinect传感器采集农业种植图像,提出一种基于Kinect多信息特征的图像拼接方法。根据Kinect拍摄到的植株彩色图像和读取到的三维数据,采用SIFT算法提取植株特征点,进行特征点匹配后根据深度距离信息,保证了匹配对的准确性,再引入RANSAC算法得到投影变换矩阵 H,最后采用最小缝合线算法进行图像融合。试验结果表明:
1)基于Kinect采集到的彩色图像和三维数据对植株进行图像拼接,在进行提取植株特征点后得到的特征点匹配对的准确率比传统算法高,室内试验中,传统方法图像匹配准确率为 88.1%,本文方法图像匹配准确率为92.9%;室外试验中,传统方法图像匹配准确率为92.1%,本文方法图像匹配准确率为99.1%。因此本文方法得到的投影变换矩阵H更为准确,图像拼接准确率更高。
2)室外场地试验中,存在一些不可控因素如光照差异,风吹引起的待拼接图像发生差异,但本文采用的方法可以将 2张图片很好的融合,说明此方法有很好的实际应用性,而传统的方法有明显的拼接缝。
3)基于Kinect采集到的彩色图像和三维数据对植株进行图像拼接耗时较短,室内试验中,传统方法进行拼接耗时13.04 s,本文方法耗时9.70 s;室外试验中,传统方法进行拼接耗时77.67 s,本文方法耗时71.15 s。因此本文方法实用性更强。
通过检测试验和室内外场地试验的验证,本文基于Kinect多信息特征的图像拼接方法耗时较短,对植株图像拼接效果较好,特征点匹配准确率较传统SIFT图像拼接算法提高了5.9%,能够应用于室内外植株图像的拼接。该方法也可进一步推广应用于其他场合的图像拼接中,实现基于Kinect传感器的农业植株生长状态的监测、药物肥料的精确喷洒以及病虫害的及时防治等过程中植株信息的采集和处理。
[1] Guo S, Sun S, Guo J. The application of image mosaic in information collecting for an amphibious spherical robot system[C]. IEEE International Conference on Mechatronics and Automation. IEEE, 2016: 1547-1552.
[2] Li Z, Isler V. Large scale image mosaic construction for agricultural applications[J]. IEEE Robotics & Automation Letters, 2016, 1(1): 295-302.
[3] Huo C, Men G, Zhao L H. Research on the auxiliary panoramic parking technology based on fast image mosaic[C].International Conference on Informative and Cybernetics for Computational Social Systems. IEEE, 2016: 216-219.
[4] Burdea G, Coiffet P. Virtual Reality Technology[M]. 北京:电子工业出版社, 2003.
[5] Zhang J, Tao B, Liu H, et al. A mosaic method based on feature matching for side scan sonar images[C]. Ocean Acoustics. IEEE, 2016:1-6.
[6] 张宝龙,李洪蕊,李丹,等. 一种针对车载全景系统的图像拼接算法的仿真[J]. 电子与信息学报,2015,37(5):1149-1153.Zhang Baolong, Li Hongrui, Li Dan, et al. A simulation of image mosaic algorithm based on vehicle panorama system[J].Journal of Electronics and Information Technology, 2015,37(5): 1149-1153. (in Chinese with English abstract)
[7] Guo S, Sun S, Guo J. The application of image mosaic in information collecting for an amphibious spherical robot system[C]. IEEE International Conference on Mechatronics and Automation. IEEE, 2016: 1547-1552.
[8] Liu S. The research and improvement of image mosaicing algorithm and its application in frescoes[C]. International Conference on Intelligent Computation Technology and Automation. IEEE, 2015: 817-820.
[9] 马晓丹,孟庆宽,张丽娇,等. 图像拼接重建苹果树冠层器官三维形态[J]. 农业工程学报,2014,30(12):154-162.Ma Xiaodan, Meng Qingkuan, Zhang Lijiao, et al. Image mosaics reconstruction of canopy organ morphology of apple trees[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(12): 154-162. (in Chinese with English abstract)
[10] 周志艳,闫梦璐,陈盛德,等. Harris角点自适应检测的水稻低空遥感图像配准与拼接算法[J]. 农业工程学报,2015,31(14):186-193.Zhou Zhiyan, Yan Menglu, Chen Shengde, et al. Image registration and stitching algorithm of rice low-altitude remote sensing based on harris corner self-adaptive detection[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2015, 31(14): 186-193. (in Chinese with English abstract)
[11] 姚立健,周高峰,倪忠进,等. 基于尺度不变特征转换算子的水果表面图像拼接方法[J]. 农业工程学报,2015,31(9):161-166.Yao Lijian, Zhou Gaofeng, Ni Zhongjin, et al. Matching method for fruit surface image based on scale invariant feature transform algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE),2015, 31(9): 161-166. (in Chinese with English abstract)
[12] 何东健,邵小宁,王丹,等. Kinect获取植物三维点云数据的去噪方法[J]. 农业机械学报,2016,47(1):331-336.He Dongjian, Shao Xiaoning, Wang Dan, et al. Denoising method of 3D point cloud data of plants obtained by kinect[J].Transactions of The Chinese Society of Agricultural Machinery,2016, 47(1): 331-336. (in Chinese with English abstract)
[13] 袁晓菲. 一种基于kinect深度传感器的点云拼接算法研究[D]. 沈阳:辽宁大学,2016.Yuan Xiaofei. An Research on Point Cloud Registration Algorithm Based on Kinect Device[D]. Shenyang: Liaoning University, 2016. (in Chinese with English abstract)
[14] Khoshelham K, Elberink S O. Accuracy and resolution of Kinect depth data for indoor mapping application[J]. Sensors,2012, 12(2): 1437-1454.
[15] Bonny M Z, Uddin M S. Feature-based image stitching algorithms[C]. International Workshop on Computational Intelligence. IEEE, 2017: 198-203.
[16] Wang T, Lu G, Xia Y. An efficient preprocessing method for feature based image stitching[C]. International Conference on Wireless Communications & Signal Processing. IEEE, 2016:1-5.
[17] Zhen Y, Sun Z, Li J, et al. An airborne remote sensing image mosaic algorithm based on feature points[C]. Sixth International Conference on Instrumentation & Measurement, Computer,Communication and Control. IEEE, 2016: 202-205.
[18] 陈月,赵岩,王世刚. 图像局部特征自适应的快速 SIFT图像拼接方法[J]. 中国光学,2016,9(4):415-421.Chen Yue, Zhao Yan, Wang Shigang. Fast image stitching method based on SIFT with adaptive local image feature[J]. Chinese Optics, 2016, 9(4): 415-422. (in Chinese with English abstract)
[19] 陈彦彤. 基于局部不变特征的遥感图像星上目标识别技术研究[D]. 长春:中国科学院长春光学精密机械与物理研究所,2017.Chen Yantong. Research on Satellite Image On-board Target Recognition Based on Local Invariant Feature[D]. Changchun:Changchun Institute of Optics, Fine Mechanics and Physics,Chinese Academy of Sciences, 2017. (in Chinese with English abstract)
[20] Barba Ana Victoria, Rosales Silva A Jorge, Perez Hernandez L Manuel. SIFT-SURF commutation using fuzzy logic to image mosaicking[C]. Electrical Engineering, Computing Science and Automatic Control, 2017, 28(3): 1-8.
[21] 赵岩,陈月,王世刚. 结合投影误差校正的快速 SIFT图像拼接[J]. 光学精密工程,2017,25(6):1645-1651.Zhao Yan, Chen Yue, Wang Shigang. Corrected fast SIFT image stitching method by combining projection error[J].Optics and Precision Engineering, 2017, 25(6): 1645-1651.(in Chinese with English abstract)
[22] 文伟东,张明. 基于SIFT算法的全景图像拼接技术研究[J].计算机系统应用,2017,26(7):227-231.Wen Weidong, Zhang Ming. Research on panoramic image mosaic technology based on SIFT algorithm[J]. Computer Systems & Applications, 2017, 26(7): 227-231. (in Chinese with English abstract)
[23] Tong G, Liu H. Deep sea image mosaic based on SIFT algorithm[C]. International Conference on Information Science and Control Engineering. 2017: 254-257.
[24] 杨安园,朱悦云. 多尺度 SIFT特征匹配的足迹图像拼接方法[J]. 时代农机,2017(1):52-53.Yang Anyuan, Zhu Yueyun. Method of footprint image stitching based on multiple dimensioned SIFT feature matching[J]. Times Agricultural Machinery, 2017(1): 52-53.(in Chinese with English abstract)
[25] 贾银江,徐哲男,苏中滨,等. 基于优化 SIFT算法的无人机遥感作物影像拼接[J]. 农业工程学报,2017,33(10):123-129.Jia Yinjiang, Xu Zhenan, Su Zhongbin, et al. Mosaic of crop remote sensing images from UAV based on improved SIFT algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017,33(10): 123-129. (in Chinese with English abstract)
[26] 张勇,王志锋,马文. 基于改进SIFT特征点匹配的图像拼接算法研究[J]. 微电子学与计算机,2016,33(3):60-64.Zhang Yong, Wang Zhifeng, Ma Wen. Research image mosaic algorithm based on improved SIFT feature matching[J].Microelectronics & Computer, 2016, 33(3): 60-64. (in Chinese with English abstract)
[27] 马强,项昭保,黄良学,等. 基于改进SIFT和RANSAC图像拼接算法研究[J]. 计算机技术与发展,2016,26(4):61-65.Ma Qiang, Xiang Zhaobao, Huang Liangxue, et al. Research on panorama image mosaic algorithm based on improved SIFT and ransac[J]. Computer Technology And Development,2016, 26(4): 61-65. (in Chinese with English abstract)
[28] Zhen Y, Sun Z, Li J, et al. An airborne remote sensing image mosaic algorithm based on feature points[C]. Sixth International Conference on Instrumentation & Measurement, Computer,Communication and Control. IEEE, 2016: 202-205.
[29] 朱镕杰,朱颖汇,王 玲,等. 基于尺度不变特征转换算法的棉花双目视觉定位技术[J]. 农业工程学报,2016,32(6):182-188.Zhu Rongjie, Zhu Yinghui, Wang Ling, et al. Cotton positioning technique based on binocular vision with implementation of scale-invariant feature transform algorithm[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(6): 182-188. (in Chinese with English abstract)
[30] Hossein-Nejad Z, Nasri M. Image registration based on SIFT features and adaptive ransac transform[C]. International Conference on Communication and Signal Processing. IEEE,2016.
[31] Shuang D, Cai H, Yang Y, et al. Analysis of image stitching error based on scale invariant feature transform and random sample consensus[C]. International Conference on Fuzzy Systems and Knowledge Discovery. IEEE, 2016: 1883-1887.
[32] Redzuwan R, Radzi N A M, Din N M, et al. Affine versus projective transformation for SIFT and RANSAC image matching methods.[J]. Operations Research Letters, 2011,39(6): 406-410.
[33] 夏克付,李鹏飞,陈小平. 基于改进 RANSAC算法的单应矩阵鲁棒估计方法[J]. 计算机工程与应用,2017,53(23):147-152.Xia Kefu, Li Pengfei, Chen Xiaoping. Robust method for homography matrix estimation based on improved ransac algorithm. Computer Engineering and Applications[J]. Computer Engineering and Applications, 2017, 53(23): 147-152. (in Chinese with English abstract)
[34] Li Aiguo, Zhou Shuai, Wang Rui. An improved method for eliminating ghosting in image stitching[C]. Intelligent Human-Machine Systems and Cybernetic, 2017: 415-418
[35] 方贤勇,潘志庚,徐丹. 图像拼接的改进算法[J]. 计算机辅助设计与图形学学报,2003,15(11):1362-1365.Fang Xianyong, Pan Zhigeng, Xu Dan. An improved algorithm for image mosaics[J]. Journal of Computer-aided Design&Computer Graphics, 2003, 15(11): 1362-1365. (in Chinese with English abstract)
[36] 谷雨,周阳,任刚,等. 结合最佳缝合线和多分辨率融合的图像拼接[J]. 中国图象图形学报,2017,22(6):842-851.Gu Yu, Zhou Yang, Ren Gang, et al. Image stitching by combining optimal seam and multi-resolution fusion[J].Journal of Image and Graphics, 2017, 22(6): 842-851. (in Chinese with English abstract)