基于参数化建模的悬臂结构优化设计
2018-03-07徐鹏杰张凤生刘延杰任锦霞
徐鹏杰,张凤生,刘延杰,任锦霞
基于参数化建模的悬臂结构优化设计
徐鹏杰,张凤生*,刘延杰,任锦霞
(青岛大学 机电工程学院,山东 青岛 266071)
参数化设计方法中初始参数通常是凭借设计经验或参考以往的设计,之后对模型进行仿真分析,确定其是否满足设计要求。针对方法中存在的主观性和设计效率问题,给出一种快速获取最优建模参数的方法。首先将机械结构的参数化尺寸定义为变量,根据结构的设计要求建立目标函数。然后利用MATLAB求解目标函数的最优解,该最优解就是参数化尺寸的最优值,从而实现机械结构的优化设计。文中通过一设计实例,介绍了该方法的设计思路与设计过程,验证了其可行性和有效性。
悬臂结构;参数化建模;目标函数;MATLAB
目前,机械设计的典型方法是先进行参数化建模[1],然后对模型进行仿真分析,确定其是否满足设计要求。如果不满足设计要求,则需重新修改建模参数,并进行仿真分析,直至达到设计要求,有时甚至需要重复多次。显然,这会降低设计效率。参数化建模是将目标产品的结构尺寸参数化,并建立起参数化尺寸之间的相互关系,通过调整参数来修改和控制几何形状,自动实现产品的三维建模。其中,对参数的调整是凭经验或参考以往的设计,有一定的主观性。为此,本文提出了一种快速准确获取最优建模参数的方法。首先将机械结构的参数化尺寸定义为变量,根据机械结构的设计要求建立目标函数[2]。然后利用MATLAB求解目标函数的最优解[3],即参数化尺寸的最优值,再根据最优解对机械结构进行三维建模,实现机械结构的优化设计。
1 设计实例分析
图1和图2所示为某设备上主轴和U型臂的结构简图。主轴左端通过联轴器与电机连接,右端与U型臂固连,主轴中间部分安装轴承,并固连在立柱上。为了增加连接的强度和可靠性,U型臂和主轴之间焊有加强板。U型臂由矩形管折弯焊接制造,U型臂上安装有其它零部件,并承受外部载荷。

图1 主轴和U型臂结构图

图2 主轴装配示意图
这种设计结构类似于悬臂梁结构[4],外部载荷作用在U型臂的端部,支撑点是两个轴承。因此,对机械结构的强度和刚度要求较高[5],尤其是对主轴和U型臂的弯曲变形量要求更高,是设计的关键。
应用本文提出的设计方法,如图3所示。轴颈(段和段)与轴承配合,其径向尺寸和横向尺寸为定值,轴头(段和段)、轴环(段)的径向尺寸与轴向尺寸定义为变量,径向尺寸分别设为45-21、45-23和45+22,轴向尺寸为1~3;U型臂由矩形管弯折焊接制造,其弯折长度尺寸定义为变量,选用的矩形管规格为90 mm×50 mm×4 mm,则U型臂的宽度尺寸和厚度尺寸为定值。根据分析,主轴和U型臂的弯曲变形量是设计的关键指标。因此,将主轴挠度δ和U型臂挠度定义为目标函数。根据设计要求给出各变量的取值范围,如表1所示。
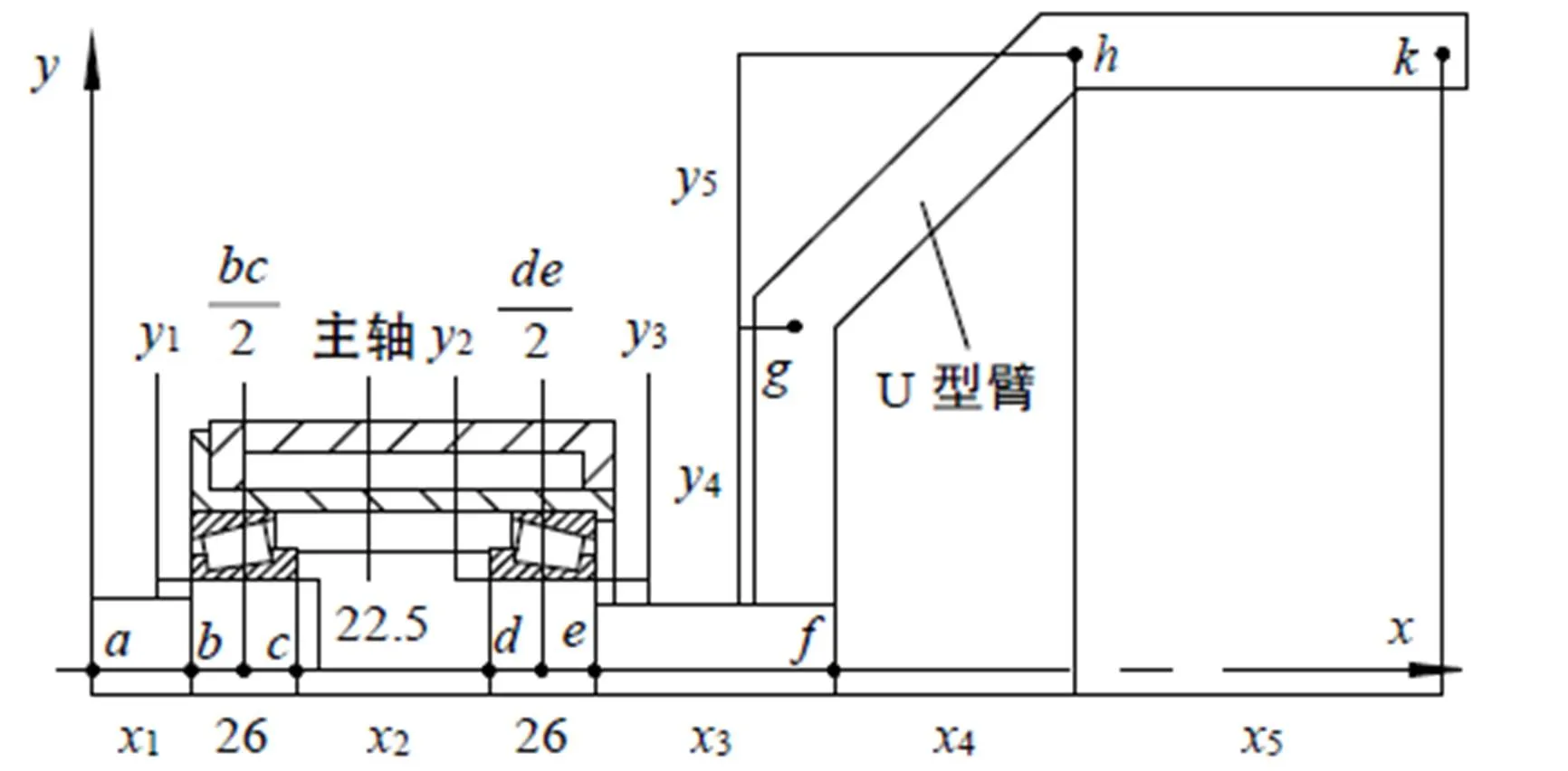
图3 主轴和U型臂数学模型
表1 主轴和U型臂的各尺寸变量取值范围

2 建立目标函数及求解
2.1 利用能量法[6]建立主轴挠度的目标函数
(1)确定外部载荷及约束力
根据设计要求,U型臂承受的最大外部载荷max=1500 N,载荷作用于U型臂两壁的端部,单臂载荷F=750 N,如图4所示。

图4 主轴和U型臂受力分析图


(2)根据轴径及约束力的位置,将轴进行分段(表2)
(3)设虚设单位载荷[8]为1 N,作用于点,求解虚设约束力

(4)根据能量法推导出各段挠度计算公式
式中:l为轴上各段的长度;为材料弹性模量;I为轴上各段的截面惯性矩;12、12为轴上各段的左右两端弯矩、虚设单位载荷弯矩。
表2 主轴分段表



利用同样的方法可求出轴上其他各段的挠度δ~δ。然后将各段挠度进行叠加,最终主轴挠度δ为:

2.2 利用叠加法[8]求解U型臂的目标函数δU
对于U型臂,需要对点挠度U进行计算。受力如图4所示,利用叠加法建立目标函数U。根据设计形状将U型臂分为、和三段。
在段,点挠度Ug由力F产生的挠度Ug1和附加弯矩M产生的挠度Ug2组成。根据材料力学[8]挠度计算公式,得:


(10)
同理,求出段的挠度Uh1和附加弯矩M产生的挠度Uh2、段挠度Uk。在整个U型臂上,点的挠度U为:

式中:为U型臂各段长度,mm;I为截面惯性矩,mm4。
2.3 利用MATLAB求解目标函数的最优解
应用MATLAB求解目标函数δ和U,以得到各尺寸的最优解。求解结果如表3。为全面了解表3中各变量变化对主轴挠度δ和U型臂挠度U的影响,任意选取两个变量,其他变量取优化结果值,应用MATLAB分析所选变量对δ和U的影响,结果如图5~图6所示。
表3 MATLAB求解值

设计结果分析:
(1)转轴许可挠度δ=(0.0001~0.005),为转轴支撑点间的距离[6]。可得主轴挠度为δ=0.0496 mm,在0.012~0.060 mm之间,符合设计要求。
(2)除变量1外,其余各变量对主轴挠度δ和U型臂挠度U均有影响,但各变量对δ和U的影响各不相同,且不是简单的线性关系。例如,在图6中,5增大时,主轴挠度δ快速增大。这表明在设计U型臂时,段的长度要精确设计,尽量减小对主轴的挠度δ影响。

图5 δZ与x1、x2关系图
3 3D建模与有限元分析验证
为校验本文提出的设计方法的可行性与有效性,根据表3中求解的1~5值建立主轴和U型臂的三维模型,导入ANSYS WorkBench进行有限元分析。分析时,处理掉部分小倒角和圆角,忽略焊接工艺边[10]。有限元分析的关键在于网格划分,本设计实例采用Meshing进行网格划分,关键部位进行网格细化,如图7所示。将总变形作为分析输出结果,如图8所示,外部载荷处变形量为13.782 mm,与本文设计方法求得的值接近,证明了其正确性。
4 总结
本文的设计方法是对基于参数化建模的优化设计方法的改进,它将机械结构的优化设计作为数学最优化问题来处理。针对具体的机械结构设计,除个别与标准件配合的尺寸取定值外,其余结构尺寸设定为变量,并选定结构中的关键设计要求作为优化目标,建立目标函数。再利用计算机求出目标函数的最优解。与已有的参数化建模设计相比,该方法不仅有效提高设计效率,而且揭示出各尺寸变量对结构性能的影响程度。

图7网格划分图
图8挠度图
[1]张新红,司志凡. 基于SolidWorks的蜗杆传动参数化建模[J].机械工程与自动化,2009(1):61-63.
[2]孙晓辉,丁晓红. 结构多目标拓扑优化设计[J]. 机械设计与研究,2012,28(4):1-4.
[3]孙伟,赵恒华,杨洪波,等. 基于MATLAB+轴承无心磨削工艺参数的优化[J]. 现代制造程,2015(4):65-69.
[4]商跃进. 悬臂式掘进机回转机构虚拟样机优化设计[J]. 中国工程机械学报,2015,13(2):135-138.
[5]陈小安,刘俊峰,陈宏,等. 计及套圈变形的电主轴角接触球轴承动刚度分析[J]. 震动与冲击,2013,32(2):81-85.
[6]邱宣怀,郭可谦,吴宗泽,等. 机械设计[M]. 北京:高等教育出版社,2011:320-324.
[7]王铎,程靳. 理论力学[M]. 北京:高等教育出版社,2002:22-109.
[8]张功学,侯东生. 材料力学[M]. 西安:西安电子科技大学出版社,2008:209-213.
[9]赵小川,梁冠豪,王建洲,等. MATLAB 8.X实战指南[M]. 北京:清华大学出版社,2015:91-181.
[10]杨飞翔,洪鹰,王刚. 基于ANSYS顶升平移装置的优化设计[J]. 机械科学与技术,2015,34(5):1-7.
Optimization Design of a Cantilever Structure Based on Parametric Modeling
XU Pengjie,ZHANG Fengsheng,LIU Yanjie,REN Jinxia
( College of Mechanical & Electrical Engineering, Qingdao University, Qingdao 266071, China )
The initial parameters of parametric modeling method are usually determined by means of experience or by reference to previous designs, and then the model is simulated and analyzed to determine whether it meets the design requirements. Due to the problems of subjectivity and efficiency in the method, this paper presents a method to quickly obtain optimal modeling parameters. The parameterized dimensions of the mechanical structure are firstly defined as variables, an objective function is established according to design requirements. And then the optimal solution of the objective function is solved by MATLAB, which is the optimal value of the parameterized dimensions, and thus to realize the optimal design of mechanical structure. Combined with an design example, the paper introduces the design idea and design process of the method, and verifies its feasibility and effectiveness.
cantilever structure;parametric modeling;objective function;MATLAB
TH122
A
10.3969/j.issn.1006-0316.2018.02.013
1006-0316 (2018) 02-0049-05
2017-06-30
徐鹏杰(1992-),男,山东滨州人,硕士研究生,主要研究方向为机械电子工程。
通讯作者:张凤生(1962-),男,山东青岛人,博士,教授、硕士研究生导师,主要研究方向为机电一体化设计。