徕卡三维激光扫描系统在建筑物精细建模中的应用
2018-03-07朱曙光周建郑
朱曙光,何 宽,2 ,周建郑
(1. 黄河水利职业技术学院测绘工程学院,河南 开封 475003; 2. 河南理工大学测绘与国土信息工程学院,河南 焦作 454000)
近些年,随着信息科学和计算机技术的飞速发展,测绘科学技术也发生了巨大变革,三维激光扫描技术已逐步应用于三维建模、变形监测等领域中。利用三维激光扫描技术进行高精度的三维建模还主要应用于机械模具这些小型化产品的设计和生产方面,而对于高大建筑物因采集受地形、建筑物本身结构及环境条件等的影响,会导致点云数据出现缺失或产生噪声,要想获得高精度的建模效果具有一定的难度。本文主要以河南理工大学西门为例详细论述了基于Leica Scan Station P40三维激光扫描系统在建筑物精细建模中的应用。
1 Leica Scan Station P40三维激光扫描系统
Scan Station P40是由徕卡公司生产的新一代超高速三维激光扫描系统,主要包括三维激光扫描仪、专用标靶、计算机和Cyclone配套数据处理软件等构成。主要有以下特点:
(1) 全方位视角测量、速度快、精度高。Leica P40可以实现360°×290°无死角的扫描,扫描速率可以达到1 000 000点/s,单点的测量精度可达mm级,扫描仪的精扫标靶获取精度为2 mm,保证了数据配准的精度。
(2) 自动获取高分辨率图像。Leica P40三维激光扫描仪集成了400万像素自动调焦的数码相机,它可以拍照和获取连续图像,获取的高像素照片可以用于三维点云数据的纹理贴图。
(3) 外业操作便捷、智能化程度高。P40内置功能强大的机载程序,高分辨率的彩色触摸屏操作,使外业的数据扫描工作非常直观、便捷,同时还可以结合棱镜或GNSS进行外业扫描作业,能够大大提高作业速度和内业数据的配准精度。
(4) 功能齐全的专业后处理软件。主要包括三维点云数据处理的Cyclone软件、Cloudworx及TruView功能模块,这些使得点云数据的处理更加容易和高效。其中Cyclone软件为三维激光扫描领域的主流点云数据处理软件,用户使用该软件即可以高效控制扫描仪对实体进行扫描,高速有效地提取高分辨率点云数据。
2 点云数据采集
2.1 准备工作
扫描前应根据目标位置和形状合理设置测站位置和数量,测站位置应选择在地势平坦、地基稳定且视野开阔的地方,以保证能最大范围地扫描到被测目标。Lecia P40三维激光扫描仪具有测站定向功能,使用该功能可以在数据采集时使获取的点云数据自动完成配准,若布设标靶则应结合测量实际情况和具体要求,将标靶布设在各测站扫描的重叠区域内,公共标靶数量一般不少于3个,并且尽量避免位于同一条直线上。
2.2 扫 描
为了保证建筑物扫描数据的完整性和减小原始数据及配准误差,本次分别在4个控制点上进行了扫描,通过对扫描仪进行扫描视场、分辨率和照片控制的设置等扫描参数设置后自动完成对建筑物进行点云数据扫描和影像获取。
2.3 点云数据预处理
点云数据预处理主要是利用Leica三维激光扫描仪配套的数据后处理软件Cyclone完成,其处理过程包括点云配准、去噪滤波、点云分割等内容。
2.3.1 点云数据配准
数据配准就是将基于各个测站的扫描点云数据合并为一个完整统一坐标系下的点云,主要有标靶配准、控制点配准、点云配准等多种方法。若扫描时进行了设站定向操作,则系统会自动完成数据配准。
2.3.2 点云去噪
由于受仪器精度、物体表面、环境等因素的影响,扫描的点云中会出现一些噪声点,如果不把这些点去除,必然会影响后续建模的精度。对于噪声点的判别,一些明显的异常点和散乱点,可直接通过肉眼判别并予以删除,还可以根据已知信息确定的扫描仪姿态参数来判定点云数据有效范围,从而剔除有效范围之外的数据。
2.3.3 点云滤波
点云滤波即对去噪后点云数据所进行的平滑处理。通过滤波可以有效提高后续建模的质量,同时可以降低点云的密度,节约数据存储空间,提高后续数据处理的速度。点云滤波主要是利用扫描仪配套数据处理软件,采用人工交互方式进行编辑处理。去噪滤波后的点云数据如图1所示。

图1 去噪滤波后的点云数据
3 三维精细建模
在Cyclone软件对点云数据进行预处理的基础上利用Geomagic对合并后的点云数据进行了三维精细建模。利用Geomagic构建建筑物三维模型一般需要经历点、多边形和曲面3个阶段的数据处理。
3.1 点阶段
点阶段是对配准后点云质量和数量做进一步的处理,为了更加清晰、直观地观察点云数据可以进行着色处理,由于在Cyclone中进行点云配准时已对点云进行了去噪滤波处理,在这里可以直接对点云数据进行多边形网格的创建。
3.2 多边形阶段
利用三维激光扫描仪扫描建筑物时,由于受植被、行人等障碍物的遮挡及建筑物表面反射等因素影响使扫描的点云数据缺失,造成在多边形模型上出现一些孔洞或缺口,为了提高建模精度,必须对其进行填充和修补。经过修复处理后多边形数据量大,同时可能还存在一些明显凸起和比较粗糙的区域,在保证建模精度的情况下还可以对三角形格网进行简化和光滑处理,以达到进一步减少内存占用、提高数据建模质量和速度的目的。
3.3 曲面阶段
曲面阶段是在曲面编辑状态下通过提取轮廓线对其编辑、移动、细分延伸和升级约束等处理到准确位置以保持轮廓线的平顺,然后依次进行构造曲面和栅格并进行一系列的编辑处理,最后拟合一个连续的Nurbs曲面。拟合曲面整体效果如图2所示。
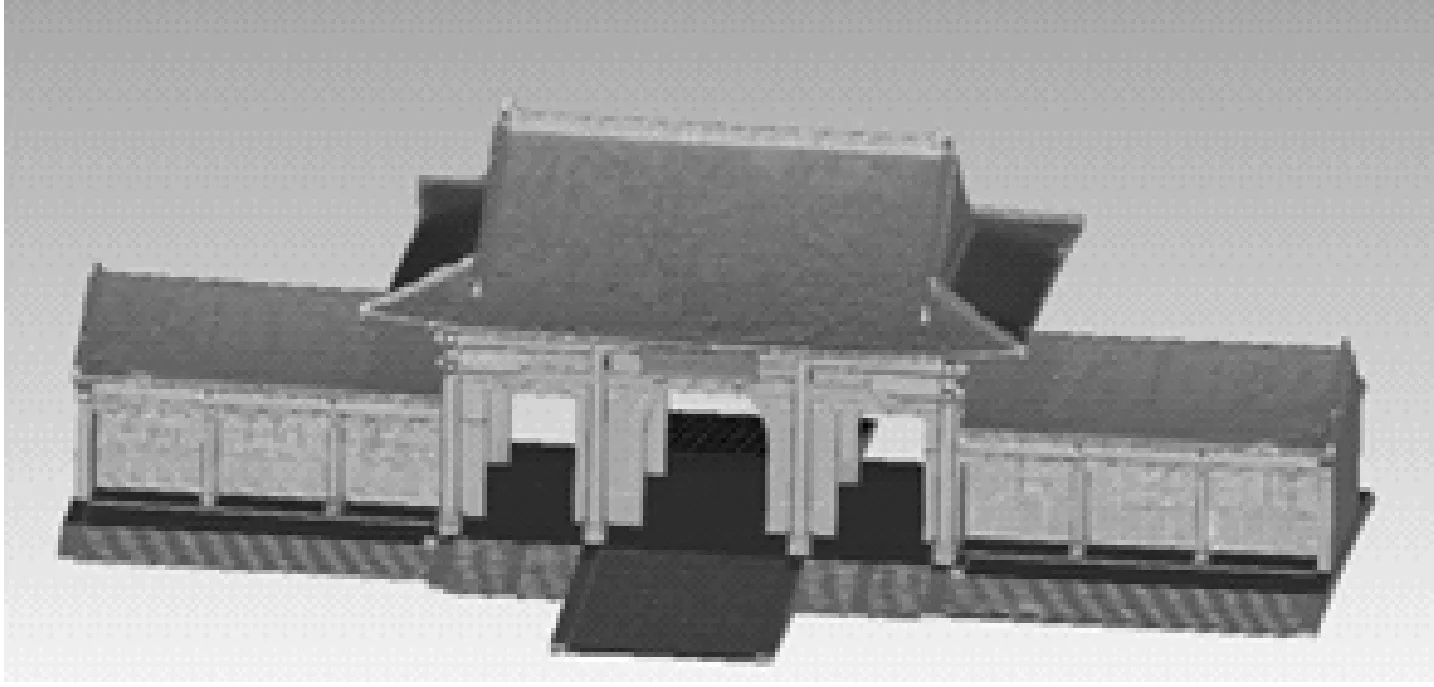
图2 拟合曲面整体效果图
4 三维建模精度分析
4.1 点位精度分析
4.1.1 仪器测量误差
三维激光扫描仪获取的点云数据误差主要包括测角和测距误差,这两方面的误差对三维模型点位精度的影响为[1]
(1)
式中,md为仪器的测距误差;mβ为仪器的测角中误差;S为测站点与目标之间的水平距离。徕卡P40三维激光扫描仪的测距精度为3 mm/50 m,测角精度为8″,扫描目标距离在20 m以内,这些数据代入式(1)可得仪器测量误差为m1=3 mm。
4.1.2 标靶精度误差
根据徕卡P40的标称精度,其标靶获取精度的为m2=±2 mm。
4.1.3 点云数据配准误差
由前面点云数据配准部分可知本次配准点云的最大误差为m3=±2 mm。
根据误差传播定律可知,点位误差的理论值为
(2)
将以上数据代入式(2),可得点位总误差为m=±4.1 mm。
4.2 三维模型与实测结果对比分析
本次通过分别在点云数据和模型数据上选取并量测对应的10条边长,然后和全站仪观测的数据进行了比对分析。测得的距离数值见表1。
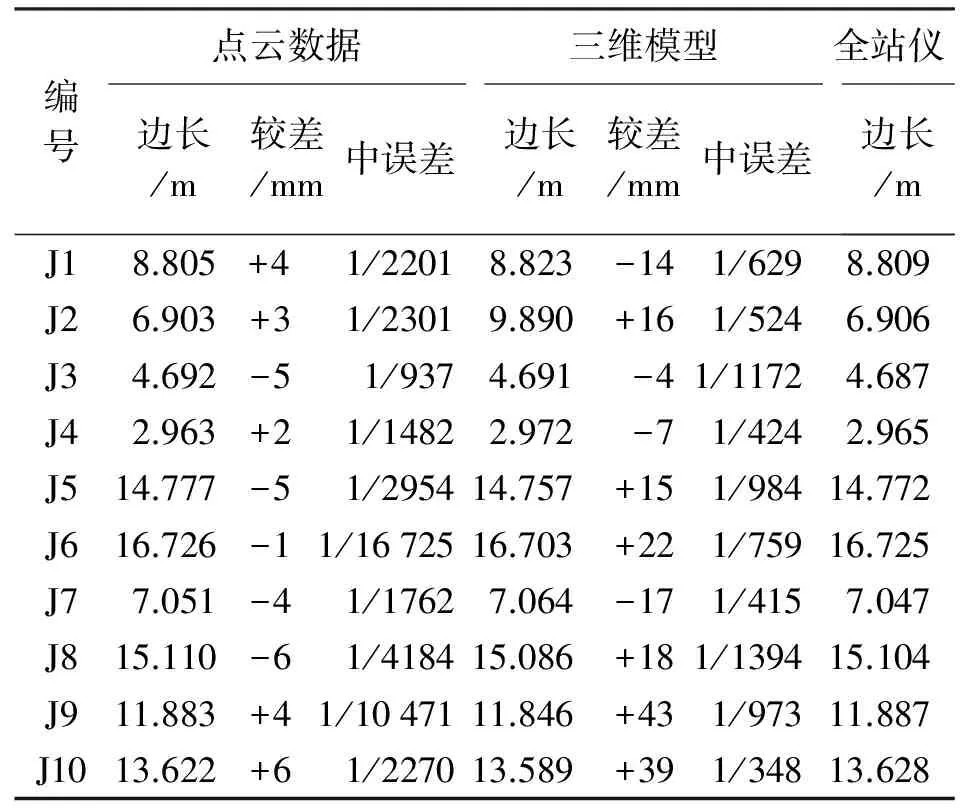
表1 三维模型、点云与全站仪对比
从表1中可以看出,点云数据上量测的边长与全站仪观测所得的数据之间偏差较小,边长的变形最大为6 mm,最小为1 mm,边长中误差最大为1/937,最小为1/16 725,由于受到点位的偏移,点云拟合算法及模型的修补等因素的影响,三维激光扫描所建立的模型与全站仪观测所得的数据之间存在着一定的偏差,边长的变形最大为43 mm,最小为4 mm,边长中误差最大为1/348,最小为1/1394。屋顶在建模过程中使用镜像功能,导致数据不是绝对分割,因此屋顶模型与全站仪数据偏差稍大。
5 结 论
利用三维激光扫描技术不仅能够自动、快速、非接触地获取建筑物表面海量三维空间坐标数据,并且通过对点云数据进行处理分析能够快速实现高精度、高仿真模型的构建,可以满足各种工程的需要。与此同时三维激光扫描技术仍处在一个不断发展、完善的阶段,相信未来三维激光扫描硬件及软件功能的提升必将使其在建筑物精细建模及其他领域得到更深入的应用,这也是三维激光扫描技术未来发展的一个必然趋势。
[1] 李宝瑞.地面三维激光扫描技术在古建筑测绘中的应用研究[D].西安:长安大学,2013.
[2] 徐辛超,徐爱功,于丹.地面三维激光扫描点云拼接影响因素分析[J],测绘通报,2017(2):14-18.
[3] 于海霞.基于地面三维激光扫描测量技术的复杂建筑物建模研究[D].徐州:中国矿业大学,2014.
[4] 徐凯,郝洪美,郭亚兴.基于三维激光扫描仪的三维文物模型的建立[J].北京测绘,2014(4):120-122.
[5] 姜如波.基于三维激光扫描技术的建筑物模型重建[J].测绘通报,2013(1):80-83.
[6] 王田磊,袁进军,王建锋.三维激光扫描技术在建筑物三维建模可视化中的应用[J].测绘通报,2012(9):44-47.
[7] 陈俊铭,李伟.基于地面三维激光扫描数据的快速建模[J].测绘与空间地理信息,2017(8):17-20.
[8] 熊友谊,冯志新.利用点云数据进行三维可视化建模技术研究[J].测绘通报,2012(5):20-23.
[9] 张维强.地面三维激光扫描技术及其在古建筑测绘中的应用研究[D].西安:长安大学,2014.
[10] 王晏民,石宏斌.应用三维线特征自动配准建筑物点云数据[J].测绘通报,2014(9): 23-25.
[11] 徐守乾,朱延娟.稀疏点云的曲面重构[J].现代设计与先进制造技术,2011(3):35-38.
[12] 杜志强,石强,董兆江.基于地面激光扫描的矿山三维建模关键技术[J].地理空间信息,2013(6):23-26.
