手持式水果辅助采摘器的设计
2018-03-06张纬哲黄稼元
张纬哲,张 斌,黄稼元
(1江西理工大学,江西 赣州 341000;2.江西铜业集团公司德兴铜矿;3.杭州电子科技大学)
0 引言
随着人们生活水平的不断提高,柑子、橘子、梨、苹果、桃子及石榴等水果需求量增大,种稙面积越来越大。这些长在较高果树上的水果,国内果农仍较多地采用传统的人手采摘,但由于身高限制,往往需要借助梯子,或爬上果树进行采摘作业,从而劳作效率低,对人和果树存在着一定的安全作业风险。
目前,为了提高水果的采摘效率,国外已研制出了一些大型的果树机械采摘装备[1-2]。这些大型机械采摘装备对果园的地面平整度有一定的要求,较适用于大型平原地带的果园采摘,而对于小型或地形高低不平等环境复杂的果园不适宜。
为提高小型或地形复杂果园的果树采摘效率,市场上也已出现了一批手动或电动的水果辅助采摘器,如爪式采摘手[3]和剪式采摘手[4]等,这些辅助采摘手在一定程度上解决了果树采摘的安全性与便利性问题。但仍存在着水果采摘捕获定位操作较困难,或果柄拉拽式折切易造成水果损伤,或采摘后水果收纳的效率较低等问题,难以在生产中得到较好的推广。此外,针对不同类型的水果采摘,很多科研院校正在研制各类智能水果采摘器[5-6],但目前基本上仍处于实验研制阶段。
为此通过调研,本项目组设计了一款手持式果树辅助采摘器,以克服现有水果辅助采摘器性能的不足,满足实用化的需求。
1 功能要求与结构分解
1.1 功能要求分析
本文所涉及的水果辅助采摘器,相当于人手的延伸。因此,对照人手采摘水果步骤,其具有的功能主要有:(1)采摘器能够调整长度与角度,以便够着果树上较高的水果;(2)水果捕获抓取功能,以便后续的水果剪切定位;(3)果柄定位功能,使果柄定位于剪刀工作范围内;(4)果柄剪切功能,剪切刀锋利,剪切用力小;(5)果实收纳功能。既要保证收纳效率,也不能造成果实损害。
此外,考虑到野外的作业场所和生产成本,辅助采摘器所有功能结构的驱动均采用人工手动操作。因此,其结构需具有轻巧和易操作的人机工程要求。
1.2 功能结构分解
根据上述采摘流程步骤,为实现辅助采摘器的功能要求,采摘器总体按调节杆模块、采摘模块及收纳模块进行功能结构的模块分解。其中,调节杆模块用于采摘器长度和角度的调节,采摘模块用于水果的捕获、果柄定位与剪切,收纳模块用于果实收纳。其功能结构分解及对应的采摘流程功能见图1。
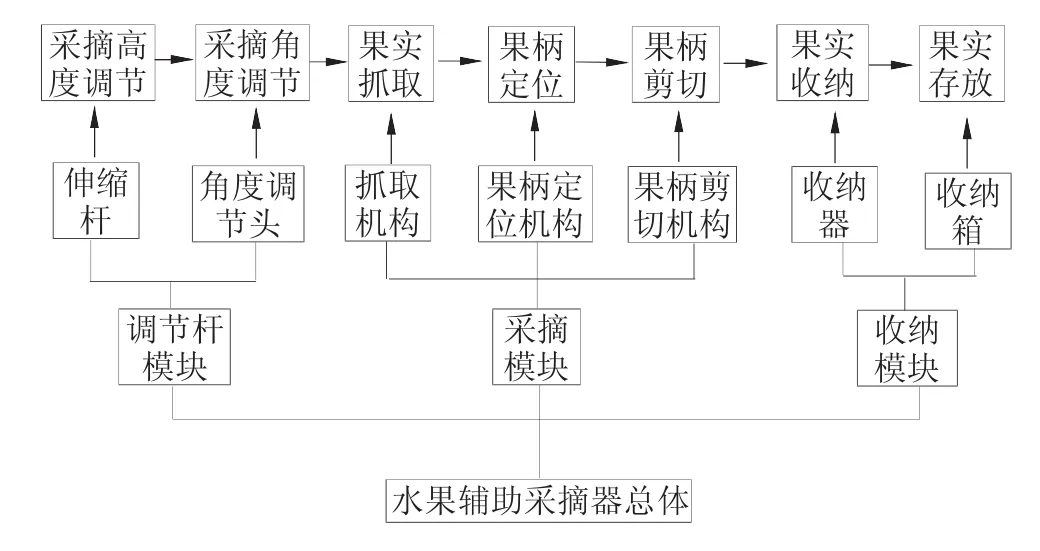
图1 采摘器功能结构与采摘流程分解示意
2 结构设计
根据采摘器功能与结构分解,设计的采摘器总体结构见图2。其主要由调节杆、采摘及收纳3个功能模块组成。其中,调节杆模块主要由伸缩杆和角度调节头组成,角度调节头与采摘模块连接;采摘模块主要由果实捕获机构、果柄定位机构及剪切机构组成;收纳模块主要由收纳器与收纳箱组成,收纳器与采摘模块连接,果实通过收纳器进入地面的收纳箱。3个功能模块结构中,采摘模块是采摘器的主体,因而是采摘器设计的重点与关键模块。

图2 辅助采摘器总体结构设计
2.1 调节杆模块
调节杆模块结构见图3。其伸缩杆用于辅助采摘器的长度调节,主要根据人机工程学原理,对市场上现有众多的长度调节杆进行选型设计;角度调节头见图4,用于采摘模块采摘时的角度调节,由上、下调节块组成,分别与采摘模块、调节杆固定连接。上、下调节块通过螺栓螺母连接,旋松螺母,即可调整上、下调节块的相对角度,即调整采摘模块与调节杆之间的相对角度。
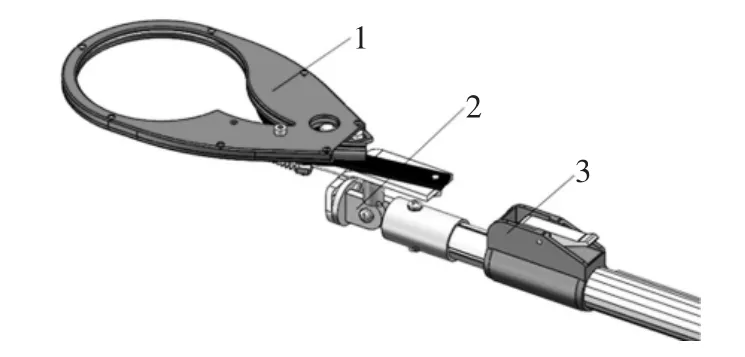
图3 调节杆模块结构
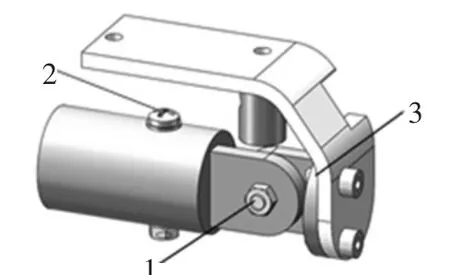
图4 角度调节头结构
2.2 采摘模块
采摘模块结构见图5,由水果套取捕获机构、果柄索定位机构及果剪式剪切机构组成。
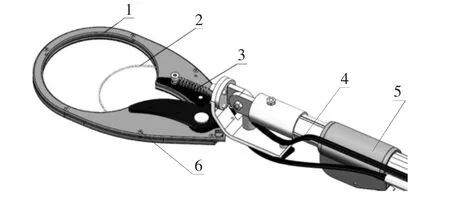
图5 采摘模块设计
现有的爪式采摘手和剪式采摘手均存在着果实捕获较为困难,果实易损伤、且结构较为复杂等不足。为此,本设计中,果实捕获采用圆环套取方案。由于套取环内径较大,相对来讲,果实捕获较易;捕获中,由于套取环无需与果实接触,也就不易对果实造成损伤;同时,套取环结构非常简单,易制作,成本低。实际应用中,套取环还可以做出内径不同的系列,以适应不同的水果。
水果被捕获后,将果柄剪切,水果才能采摘下来。套取环捕获水果后,水果的果柄不一定正好定位在果剪的工作范围内,因此,需要有定位机构将果柄定位到果剪的工作范围中。本设计中,采用索定位的机构方案(图5),其主要由定位索、末端滑动套等组成。定位索设计为弹性索,初始状态时,前端定位索位于捕获套取环的索槽中,后端与末端滑动套连接,末端滑动套安装在调节杆上。当水果套取捕获后,操作人员一只手拉动末端滑动套,定位索收缩,将果柄拉入定位到果剪工作范围内,果柄剪切后,松开末端滑动套,定位索在自身的弹性作用下,恢复到初始状态。
果柄剪切采用果剪式剪切机构方案(图5)。其主要由果剪刀头、动力弹性传递索及末端握把等构成。果剪刀头设有复位弹簧;动力弹性传递索一端与果剪柄连接,另一端与末端握把连接;末端握把安装在调节杆上。初始状态时,果剪两刀片张开;果柄剪切作业时,握捏末端握把,通过传递索,果剪两刀片啮合,剪切果柄;果柄剪切后,松开末端握把,动力传递索复原,果剪两刀片在复位弹簧作用下,回复到初始的张开状态。
2.3 收纳模块
收纳模块结构设计见图2,收纳模块主要由波纹式果实收纳网与收纳箱组成,收纳网上端与采摘模块的果实套取环连接,果实通过收纳网下滑至地面的收纳箱。
收纳网为中空弹性节状网兜,果柄剪切后的果实在重力作用下,因网兜弹性波纹节的作用,能有效阻缓自由落体运动,从而防止果实滑落过程中引起的较大碰撞,造成果实损伤。
3 小结
经调研、功能需求分析与设计后,对设计的辅助采摘器进行了制作与采摘试验(图6)。试验表明,所设计的辅助采摘器,能轻易地捕获果树高处的水果,果柄定位与剪切操作简便、效果佳,水果收纳简单且不易损伤水果,克服了现有水果辅助采摘器性能的不足,实现了设计的功能目标要求。此外,所设计的辅助采摘器成本极为低廉,非常有利于今后在果园的推广应用。

图6 样机采摘试验
