基于巡检机器人的电气物联网系统集成设计
2018-03-06李久胜赵丽丽代绍庆孔德彭
李久胜 ,赵丽丽 ,邵 青,代绍庆 ,孔德彭
(1.浙江工业大学 机器人教育研究中心,浙江 杭州310023;2.嘉兴职业技术学院 信息技术分院,浙江 嘉兴314036)
一、引言
工业系统集成与控制始于继电器控制,智能化综合提升得力于可编程逻辑控制,在“互联网+”模式下,工业自动化面临着新的机遇与挑战[1-2]。尤其是物联网、通信技术、大数据及云计算的发展,新业态的产业快速发展,对应的产业人才需求量随之增加,然后,需求与供给存在一定的差距[3-4]。为破解该难题,应对的措施一方面是适当扩大人才数量的供给,另一方面需加强人才培养模式创新,为产业提供更多的掌握新技术新方法的专业人才。所以,在完善对应的人才培养方案、培养措施、培养计划等在理论与知识方面强化之外,还需要从技能与技术手段全方位地进行增强,而这种手段最有效的措施就是实训教学、实验环节。目前,高校实验室电气设备的管理普遍处于松散的状态,电气设备繁多,由于人手问题,管理人员需要同时管理多个实验室,想获得设备的运行状态往往需要管理员实地检查,尤其需要逐台检查,费时耗力。同时,只有不断与时俱进的先进设备及系统才能培养出新型优秀的人才。故必需对传统的电气设备进行系统更新及创新集成,即基于物联网技术,对传统的电气设备系统进行改造升级,在工业4.0建设背景下,引入人工智能技术,打造先进的一体化物联网电气实训室,为智慧工业设备集成提供了新思路新模式。
二、Web服务机器人技术
机器人技术是一个国家科技实力及高端制造水平的体现,随着制造业转型升级,生产力在提高,工业机器人的市场需求在增加,公共安全、康复医疗、抗震救灾、特种服务机器人、教育机器人等如雨后春笋一般快速发展[5-6]。而基于Web服务的机器人,比较适用于物联网集成系统。一般情况下,机器人的操作是通过有线模型进行远程或近距离控制的。随着通信距离与传输速率也在不断增加,用户与机器人进行相互通信通过无线电波实现变成了可能,还可以不断满足众多场合的应用需求[7-8]。
1994年,著名艺术家机器人学及自动化领域的科研工作者肯·戈德堡首次提出了基于Web浏览器的远程操作机器人,而其最初的构想仅仅是给公众提供一个可通过互联网访问的远程控制机器人,并支持用户对其实施远程操作[9]。该领域经过十多年的研究,已取得不少成就。其发展大致可分为两个阶段:第一阶段主要集中在机械手的网络控制,例如Ken Goldberg的水星计划[9](Mercury Project)。第二阶段以自主式移动机器人作为主要对象,使得与远程环境的交互没有空间的限制,从而实现远距离环境下的真实无界交互作用。例如由德国波恩大学和卡内基梅隆大学开发的博物馆导游机器人Rhino和Minervaf,它们能够在高度动态的环境中实现安全自主导航,能与现场的观众 “友好相处”。特别是Minerva,它能够进行地图的学习以及上下文地图(texture map)的定位,其路径规划器考虑了移动机器人运动的不确定性,以避免移动机器人迷失方向[10]。目前可通过Web浏览器访问的复杂的自主式移动机器人是Simmons开发的Xavier机器人Il。它具有一定的智能规划能力,可以在楼内各层的各个房间进行一些简单的传送文件、敲门、说话等动作。
本文以电气综合实验室为例,利用物联网及巡检机器人技术,打造一套现代化综合的电气物联网实训系统,将所有电气设备进行集中化管理,实现远程控制,提升实验室电气设备的管理效率,达到集成化、智能化管理的目的。
三、电气物联网系统集成
在“互联网+”思维下,课题组借助于人工智能即机器人技术(巡检机器人),以所属的教学场地畅远楼A实验室、B实验室的十多台PLC控制设备为核心,将这十几台电气设备集成到一个系统,实现对电气物联网设备进行智能一体化化综合管理,形成一个完整系统机器人电气物联网系统,如图1所示。
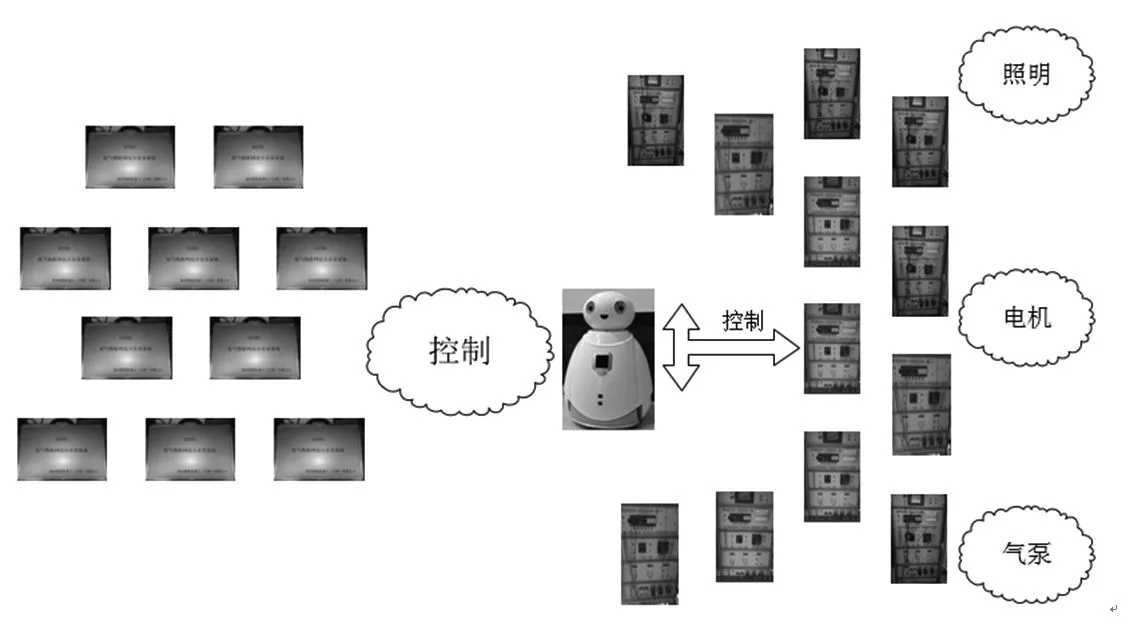
图1 基于巡检机器人的电气物联网系统设计
1.典型电气设备的选取与集成
实验室A选取了三个欧姆龙PLC实验设备,PLC型号为欧CPM1A-40CDR-A-V1;同时还选取六个PLC系统电气柜,其上PLC型号分别有欧姆龙CPM1AMAD02-CH两台、西门子SIMATIC S7-300两台、西门子SIMATIC S7-200 smart一台、台达DELTA DVP32ES2一台;而实验室B选取了三台光机电一体化装置,其上PLC型号分别有汇川H2u-0016ERN一台、欧姆龙SYSMAC CPM2AH一台、三菱MELSEC FX3u-48M一台。

图2 基于物联网技术电气设备集成系统拓扑图
针对每一台PLC装置,都对应地配置并设计了一个独立的项目,也就是每一台装置都视作独立运作完成一个具有一定功能性质的系统,如“某液体混合装置”、“某生产线物料分拣设备”、“某远程恒压供水系统”、“某电力综合变电装置”、“某中水回用系统”等,改造前,设备之间并没有任何关联,均为相互独立运行、独立控制与操作。故而,如果需要对其运行状态进行检测,甚至是控制与管理,都必须实地查看,效率低。为此,将每台PLC输入输出端口与“无线传输模块”相连,将PLC运行状态输至所相连的无线传输模块中,借由无线传感技术ZigBee技术,将运行状态信号通过电磁波以无线信号的形式进行短距离传输,无线信号经由多个无线节点,即无线信号中继站——路由器,逐步传输至电气设备集成系统的监控中心,例如可以设置在畅远B实验室,这些无线信号经过控制中心协调器信号处理,即可将A实验室、B实验室这十几台PLC的运行状态即时刷新,呈现在控制中心的显示屏幕上。当然,控制中心所需要的ZigBee技术中的协调器所需的程序,需要根据通讯形式、设备数量等实时编写;显示运行状态的触摸屏组态程序,需要根据所监测的PLC型号及其通讯方式进行同步编写。
2.集成系统优势
改进中,采用了ZigBee无线传输技术,大大免去了有线传输的麻烦与巨大成本。我们知道,若不是利用无线技术,而是有线方式传输,通常需要设计铺设管道、拉设线路。如,从现有的A实验室和B实验室开凿出一条线路,将每台PLC输入、输出信号通过线桥或通道传输至控制中心。这样一是过多的信号线通过有线铺设成本会增加很多;二是长距离敷设线路,占用实验室宝贵的空间,让本来稀缺的空间资源显得更加捉襟见肘;三是线路的可用性评估测试变得有困难,每增加一种线路时间,都需要预估可能存在的干扰情况,即结合现有电线的铺设,进行可行性评估,以免影响先前其他线路;四是维护不方便。首期工作完成,线路完成铺设后调试完毕进行封盖,随着时间推移,信号不畅或通信错误,进行故障排除时,则都撬开线路槽进行检修,而后再封合,如此反复,不但耽误教学工作开展,也无形中增加了成本。
为此,采用无线传输技术,即可免去铺设信号传输线路的以上苦恼。借由ZigBee技术,无线传输模块采集到PLC设备的输入、输出等信号后,以电磁波为载体的无线信号形式发出,经由若干个路由器进行信号的中继传递,直至传送至控制中心的协调器,接收信号,经信号处理后,显示在触摸屏上。其中,无线节点作为信号中继站的路由器,其成本低,功耗低,安装方便,甚至比安装一盏普通照明灯都方便,即只要将其固定在走廊、过道的天花板上的某一个适合之处,都不必外连其他线路,只需半年左右更换一次电池即可。这样,管理者只需要切换触摸屏上的界面,即可选择对任一个PLC运行状态进行监测,甚至有需要时,可以如此直接在触摸屏上进行点击控制,即可实现远程对PLC运行状态的改变与操控,从而免去了管理者实地查看的辛劳,只需要在控制中心的显示屏幕上画面切换进行监测,实现了对电气设备集成管理,显著提升了实验管理员对实验室电气设备管理的有效性,增强了对电气设备的控制性,提高了对安全隐患排查的时效性。
四、机器人技术融入系统的总体设计
机器人技术的进步也促进了电气综合控制技术的发展。目前,机器人学已经包括了复杂机械、电子电力、通信、现代控制、生物仿真等多个学科,但其核心技术却是智能技术,因为它涵盖了多个研究领域,具有高度的渗透性、创新性和实践性[11]。因此,它未来的发展也不再局限于机械手臂的发展或是机器人机构的优化设计,更重要的是与外围设备的交互以及功能扩展正推进机器人技术往前发展[12]。物联网的出现和快速发展为机器人技术发展提供了新的思路。基于物联网技术的机器人系统是由机器人单元、各电气设备、物联网的实验箱、上机位等组成,其总体结构如图2所示。
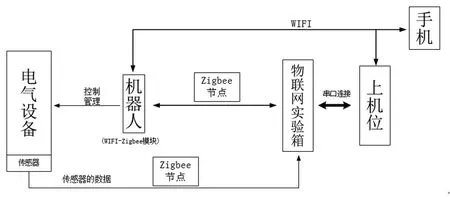
图3
基于物联网技术的机器人系统无线网络的技术框架:一是感知层,用于检测如PLC、机器人、触摸屏、变频器等比较常用的电气智能设备的数据情况的传感器单元(温湿度传感器,振动传感器,霍尔传感器);二是网络层,作用是在两个节点之间进行数据上的传送(串口数据传输、无线数据接收发送、USB等)单元等;三是应用层[13],将感知层所收集到的最终数据进行相应的计算、处理与进一步的运用于中心单元融合。
由于Zigbee通信技术的网络拓扑结构为串 (树/簇)型网络,结构较简单,可以覆盖到较大的范围。在串(树/簇)型网络中必包含至少一个全功能设备(FFD)作为Zigbee网络中的主协调器节点,负责建立起系统中的网络,为系统的通信做准备,这在三种网络拓扑结构中必不可少。此外,全功能设备(FFD)也可以当做主协调器的从属设备路由器和终端节点,既可以和其他设备进行通讯,传递由终端节点传送到主协调器的数据,也可以单纯地向上一级传送数据。而简化功能设备(RFD)只能作为终端节点,由路由器或是主协调器进行管理。
五、系统工作流程
将各设备打开,用RS232串口线将上机位与物联网实验箱联接起来,并将编写好的Zigbee无线网络的相关程序烧录进实验箱中的核心模块,为整个系统的开启工作做好准备。系统工作的流程如下:用户通过上机位下达命令,管理实验室空间内的电气设备;由于上机位与物联网实验箱已经通过RS232串口线联接完毕,相关命令由上机位的串口传递给物联网实验箱中的主协调器。而Zigbee无线网络在整个系统中起着信号传递的作用,主协调器通过已建立的网络将命令传递给路由器,路由器接收从协调器发送而来的命令并将命令转发送给终端节点。该终端节点设计安装有W-003 WiFi模块,可以实现ZigBee与WiFi模块之间的相互通信。终端节点接收到用户的命令后,通过W-003 WiFi模块,将命令信号发送给机器人嵌入式处理器中进行相应的处理,控制机器人对电气设备进行智能管理与控制。同时,装有相应传感器(温湿度传感器、振动传感器、霍尔传感器)的ZigBee终端节点时时刻刻监控着PLC、机器人、触摸屏、变频器等电气智能设备,采集传输信号,提炼出有价值及意义的采集及控制的数据,并由路由器接收发送传递给物联网实验箱中的主协调器,主协调器将这些数据通过RS232串口线发送给上机位,方便用户进行随时查看与监控[14]。此外,本课题使用的是WiFi型机器人,用户可以通过手机或是上机位与目标机器人通过WiFi连接进行直接控制。
六、系统优势
该系统从侧面验证了物联网技术在未来科技发展中起着不可缺少的作用,归纳为系统具有如下六方面优势:一是在充分利用物联网通信的多用性、灵活性和鲁棒性情况下,搭建好智能电气设备信号的采集、传输、处理及应用的全通道,保证整个信号流程的实时通畅[15];二是该系统通过将物联网体系构造的核心技术的深度解刨,对感知层所采集到的数据进行相关分类处置和进一步的挖掘,从而完成对物理世界的及时控制、明确经管和科学决策;三是使用的Zigbee技术,虽然其硬件资源电源的容量有限,通信能量能力低下,计算能力也较为有限,数据传输速度低,但它节点数量众多,可以进行较为密集的分布,可以保证系统打破区域限制,将相互隔离实验室中的电气设备特别是智能设备如PLC、机器人、触摸屏、变频器及工业领域比较常用的设备及信息进行全面采集与综合管理,从而使各个实验室之间实现互通有无,全方面整体的管理;四是实现了电气设备弱电信号的无线采集,智能设备强电信号无线监控,从而将典型的电气试验设备电控信号实现无线上网及相关实验教学的深度融合;五是通过将机器人技术与物联网系统集成进而控制电气设备,从而形成一个基于物联网的实验室教学与管理系统,实现典型案例的演示与教学模板的塑造;六是系统发挥了移动机器人的优势,普及了相关传感器的应用,可以有效避免在某些非人为可以干预的情景下需要进行的一些操作,传感器件可以24小时实现自检,提高了工作效率,节省了检测的人力、物力。
七、结束语
物联网技术的加速发展为探测监察等提供了新的思路与方案设计,也为机器人远程遥感技术提供了无线技术支持。本文对基于物联网技术的机器人系统集成进行了深入研究,充分利用目前发展前景良好的物联网技术,并对高校实验室内的智能电气设备的控制检测等进行有效的集成。设计中,将Zigbee无线传感技术与用户基础广泛的WiFi技术相结合,能够对目标机器人快速下达指令,保证相关检测数据的实时传输与全天候的检测,更重要的是这二者的无线技术与目前的有线技术相比能够打破区域限制,将几个甚至几十个实验室的电气检测及控制信息全面采集与综合管理。其次,系统中大数量的节点布置可以保证基于CC2431芯片定位方案的可行性,也可忽略发射信号因不可控因素的影响而造成的误差。
[1]SimmonsR.XAVIER:Anautonomousmobile robots on the Web[C].Proceedings ofIROS’98 Workshop on Robots.Victoria,Canada,12.17 October 1998:43-48.
[2]Yoerger D,Weiman R,Somers T.Remote control of a telerobotic underwater vehicle viasatellite[C].Telesystems Conference,1991:333-336.
[3]于涛.具有力觉反馈的遥操作机器人研究[D].长春:吉林大学,2005.
[4]宋华.基于Web的远程机器人控制技术的研究[D].哈尔滨:哈尔滨工程大学,2003.
[5]陆妹.遥操作水下机械手主从控制系统研究[D].哈尔滨:哈尔滨工程大学,2002.
[6]王军杰.基于P2P技术的家用智能机器人远程控制系统方案的研究与设计[D].上海:复旦大学,2012.
[7]王可之.基于Pioneer 3-AT的变电站巡检控制系统设计与实现[D].重庆:重庆大学,2011.
[8]董江磊.基于物联网的移动机器人遥操控系统研究[D].天津:天津职业技术师范大学,2014.
[9]周军,谢成祥.网络遥操作机器人系统模糊变结构控制研究[J].信息技术,2011(6):30-33.
[10]马官营.人体肠道诊查微型机器人系统及其无线供能技术研究[D].上海:上海交通大学,2008.
[11]葛艳红.基于物联网的教育机器人关键技术研究[D].武汉:武汉理工大学,2013.
[12]黄守麟,梁艳,欧启标.机器人实践教学的探讨和优势[J].广西物理,2011(2):56-57.
[13]刘军.基于ZigBee的智能停车场管理系统的设计与实现[D].哈尔滨:哈尔滨工程大学,2012.
[14]王博.基于用户意图识别的遥操作网络机器人[D].上海:上海交通大学,2010.
[15]刘波.物联网模式下的移动机器人气味源定位系统研究[D].武汉:武汉科技大学,2014.
