一种基于转臂式摇枕的跨坐式单轨车辆单轴走行部
2018-03-06任利惠
张 让, 任利惠, 沈 钢
(同济大学 铁道与城市轨道交通研究院, 上海 201804)
跨坐式单轨交通采用橡胶轮胎和混凝土预制轨道梁,作为一种特色鲜明的城市轨道交通制式,具有爬坡能力强、转弯半径小、占地少、噪声低、运量适中、造价低等显著优点,其独特的3大主要技术特性即噪声低、转弯半径小、爬坡能力强[1]。跨坐式单轨车辆骑在轨道梁上运行, 轨道梁一般是预应力混凝土箱型梁,车辆除底部走行轮外,在车体两侧下垂部分设有夹行于轨道梁两侧的导向轮和稳定轮,以保证车辆沿轨道安全平稳行驶[2]。
目前跨坐式单轨车辆主要有日立模式、庞巴迪模式和Scomi模式。
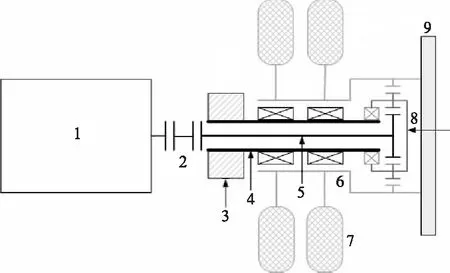
日立模式单轨车辆采用双轴走行部,具有较强的承载能力,在单轨车辆中运量最大,悬挂系统采用膜式空气弹簧,同时提供垂向和横向缓冲功能。车体与转向架之间的纵向力采用橡胶堆传递。2个牵引电机斜对称安装在构架上,通过齿轮箱和半轴驱动车轮旋转。基础制动装置采用液压制动缸和液气转换装置,如图1所示[3]。
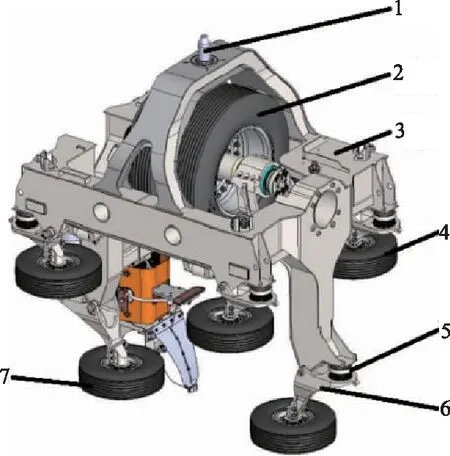
庞巴迪模式跨坐式单轨车辆采用单轴走行部,走行部有4个导轮,2个稳定轮,走行部通过沙漏型橡胶弹簧支撑车体,沙漏簧具有垂向和横向弹性,能够允许转向架相对车体产生转角,使车辆顺利通过小半径曲线[4-5],如图2所示。
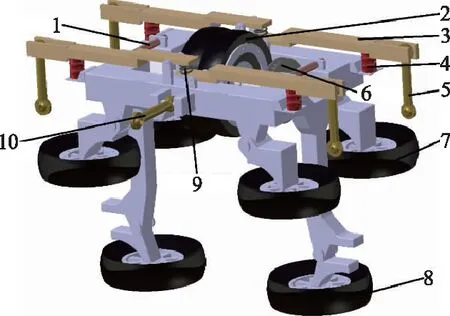
Scomi模式跨坐式单轨车辆走行部同样采用单轴结构,垂向悬挂采用转臂结构,转臂的一端与框架铰接,另一端由空气弹簧支撑,车体和转向架通过牵引销和旁承连接,结构比较简单,如图3所示。对于两轴转向架,使用单轴转向架可实现客室的低地板化,车辆也具有灵活的编组能力[6]。
相对于轮轨形式的轨道车辆,跨坐式单轨车辆的产品类型较少,主要原因是走行部品种类型较少。文中所设计的基于转臂式摇枕的跨坐式单轨车辆单轴走行部,丰富了跨坐式单轨车辆的类型。
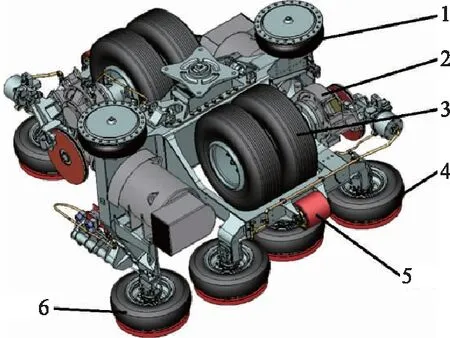
1-二系悬挂;2-驱动装置;3-走行轮;4-导向轮;5-辅助轮;6-稳定轮。图1 日立模式跨坐式单轨车辆走行部

1-走行轮;2-导向轮;3-沙漏橡胶弹簧;4-稳定轮;5-牵引拉杆;6-构架。图2 庞巴迪模式跨坐式单轨车辆走行部
1-牵引销;2-走行轮;3-构架;4-导向轮;5-橡胶弹簧;6-转臂;7-稳定轮。图3 Scomi模式跨坐式单轨车辆走行部
1 走行部结构
文中所设计的新型跨坐式单轨车辆单轴走行部主要由1 对走行轮、4 个导向轮、2 个稳定轮、“口”字型构架、转臂式摇枕空气弹簧悬挂系统、吊杆、单牵引拉杆以及牵引传动装置和基础制动装置组成,如图4所示。
走行轮采用高压充气橡胶轮胎,与轨道梁的上表面配合。走行轮的空心车轴固接在构架一侧侧梁的内侧,车轮通过轴承安装在车轴上,车轮旋转而车轴不转。4 个导向轮呈水平设置在走行部的端部,与轨道梁的上部侧面配合,2个呈水平稳定轮设置在走行部侧面下部,与轨道梁的下部侧面配合。导向轮和稳定轮在高度上有一定距离,两者配合使用来提供抗侧滚的刚度。
构架主体整体呈“口”字形,主要由2 根侧梁和2 根横梁组成。在构架一个侧梁的中央向上设置轮边电机和轮边减速箱的支撑座,用来安装轮边电机和轮边减速装置。在侧梁中央向下设置稳定轮的支撑梁,用来安装稳定轮。在构架横梁的端部向下设置导向轮的安装座,用来安装导向轮。在构架横梁的上方设置转动关节安装座,用于安装摇枕的转轴。在构架横梁的端部上部设置空气弹簧安装座,用于安装空气弹簧。在构架内侧横梁的中央设置牵引拉杆安装座。
4个摇枕横向布置在构架的横梁上方。摇枕采用转臂式结构,摇枕可绕构架横梁上的纵向转轴在侧滚方向旋转。空气弹簧设置在摇枕和构架横梁之间。由于摇枕只有绕纵向转轴的运动,故空气弹簧只承受垂向载荷,可使用约束模式的空气弹簧。车体通过吊杆吊挂在摇枕上,通过摇枕体的转臂结构和空气弹簧,实现了垂向振动的缓冲。在构架同侧横梁上方的2 个摇枕,在转轴内侧通过抗侧滚弹簧连接,通过选择抗侧滚弹簧的刚度,可灵活改变悬挂系统的抗侧滚刚度,如图5所示。转向架每侧各2个吊杆,车体通过4根吊杆吊挂在摇枕外端。吊杆上端通过球形转动关节与摇枕外端连接,吊杆下端通过球形转动关节与车体连接。通过吊杆的横向摆动,依靠车体重力实现横向缓冲。通过吊杆的纵向摆动,适应车体与转向架通过水平曲线时的位移。
1-构架拉杆;2-走行轮;3-摇枕;4-空气弹簧;5-吊杆;6-制动盘;7-导向轮;8-稳定轮;9-抗侧滚弹簧;10-牵引拉杆。图4 走行部结构的三维示意图
1-车体;2-摇枕;3-空气弹簧;4-吊杆;5-构架;6-走行轮;7-导向轮;8-稳定轮;9-轨道梁。图5 转臂式摇枕悬挂结构的示意图
牵引电机设置在构架侧梁的外侧,减速齿轮装置与牵引电机分别设置在走行轮的两侧,牵引电机的输出轴联接半轴,半轴穿过空心车轴与减速齿轮装置的输入轴联接,减速齿轮装置的输出轴与车轮联接,驱动车轮旋转,如图6所示。
2 动力学性能分析
2.1 车辆动力学模型
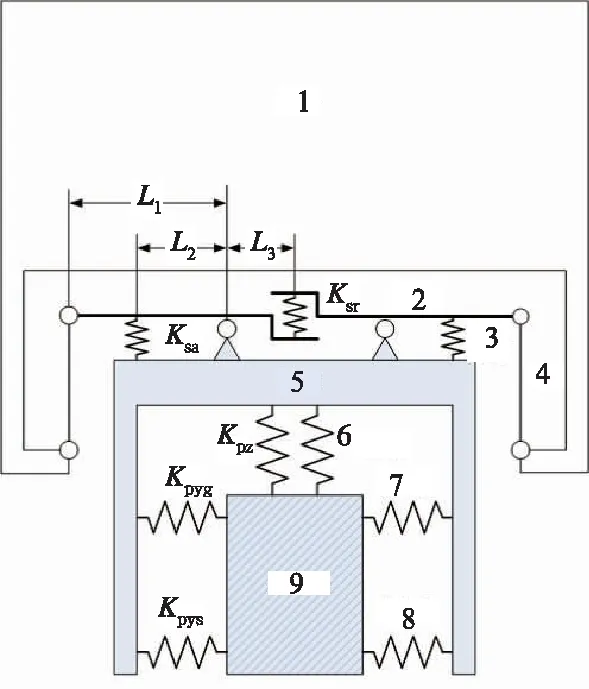
为了判断该新型跨坐式单轨车辆单轴走行部的动力学性能,利用多体动力学软件Universal Mechanism建立该新型跨坐式单轨车辆的动力学模型进行动力学分析。车辆动力学模型的主要组成有1个车体、2个构架、4个走行轮、8个导向轮和4个稳定轮,车体和走行部构架视作刚体处理,具有伸缩、沉浮、横移、侧滚、点头和摇头 6 个自由度。空气弹簧简化为弹簧阻尼力元,吊杆、减振器可简化为双极力元,即力的方向沿两点之间连线的方向。橡胶轮胎具有复杂的力学特性, 实用的轮胎模型可以分为纯理论、半经验、纯经验模型3 类, 其应用场合各有不同,文中采用Fiala理论模型,包括轮胎的侧偏特性。表1给出了车辆的主要动力学参数,图7给出了该新型跨坐式单轨车辆运动学关系和部件之间的连接关系拓扑结构图,图8为使用UM软件建立的动力学仿真模型。
1-电机;2-联轴节;3-构架;4-车轴;5-半轴;6-轮毂;7-车轮;8-行星轮系;9-制动盘。图6 传动系统结构示意图
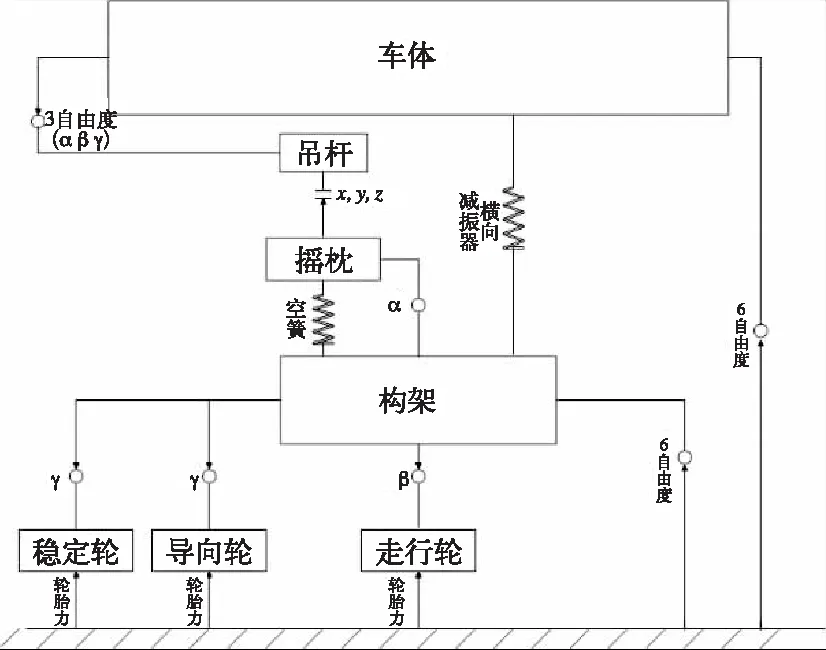
图7 拓扑结构图
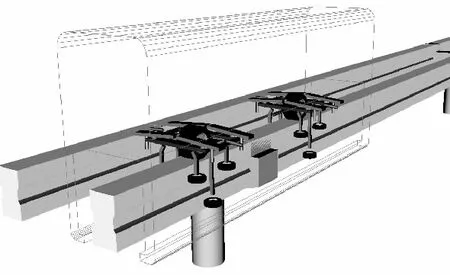
图8 UM动力学仿真模型
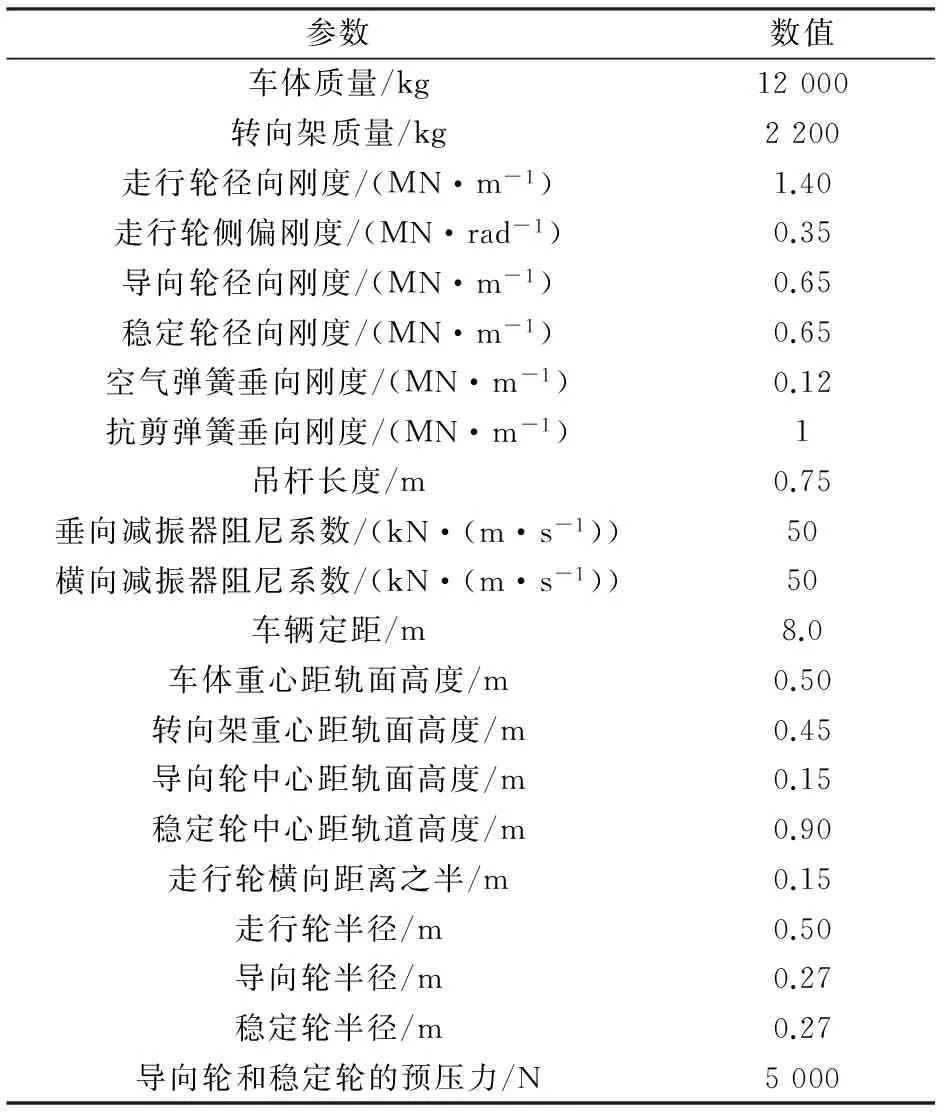
参数数值车体质量/kg12000转向架质量/kg2200走行轮径向刚度/(MN·m-1)1.40走行轮侧偏刚度/(MN·rad-1)0.35导向轮径向刚度/(MN·m-1)0.65稳定轮径向刚度/(MN·m-1)0.65空气弹簧垂向刚度/(MN·m-1)0.12抗剪弹簧垂向刚度/(MN·m-1)1吊杆长度/m0.75垂向减振器阻尼系数/(kN·(m·s-1))50横向减振器阻尼系数/(kN·(m·s-1))50车辆定距/m8.0车体重心距轨面高度/m0.50转向架重心距轨面高度/m0.45导向轮中心距轨面高度/m0.15稳定轮中心距轨道高度/m0.90走行轮横向距离之半/m0.15走行轮半径/m0.50导向轮半径/m0.27稳定轮半径/m0.27导向轮和稳定轮的预压力/N5000
2.2 曲线通过性能
转弯半径小是单轨交通的优点之一,其正线的最小曲线半径通常只有100 m。图9给出了车辆以均衡速度通过曲线半径为100 m曲线路段时,前后转向架各轮载荷变化情况。从图中可以看出:车辆在进入曲线路段时,前走行部的右侧前导向轮和左侧后导向轮以及后走行部的左侧前导向轮和右侧后导向轮径向力逐渐增大然后趋于稳态;前走行部的左侧前导向轮和右侧后导向轮以及后走行部的右侧前导向轮和左侧后导向轮径向力逐渐减小然后趋于稳态。前走行部右侧前导向轮和左侧后导向轮的径向力较大,左侧前导向轮和右侧后导向轮径向力较小;后走行部左侧前导向轮和右侧后导向轮径向力较大,右侧前导向轮和左侧后导向轮径向力较小,这样前后走行部4个导向轮所受径向力就会形成一个使车辆沿轨道行驶方向转动的摇头力矩,前后走行部的摇头力矩方向相反,这两个摇头力矩是车辆更好地通过曲线路段的主要转动力。前走行部右侧稳定轮径向力在曲线路段增大,左侧稳定轮径向力减小,后走行部左右稳定轮径向力变化不大。前后走行部走行轮侧偏力方向相反,由于车体和走行部用吊杆连接,车体和走行部之间有一定的转角,故走行轮侧偏力一直存在侧偏力。前后走行部左侧走行轮径向力均增大,右侧走行轮径向力均减小,左右轮增减载量较小。
图10给出车辆以均衡速度分别通过各个曲线半径的车体侧滚角、导向轮径向力、稳定轮径向力和走行轮侧偏力的稳态最大值,其中曲线超高率设置为6%。可以看出:随着曲线半径的减小,车辆的侧滚角、导向轮径向力、稳定轮径向力和走行轮侧偏力均逐渐增大。
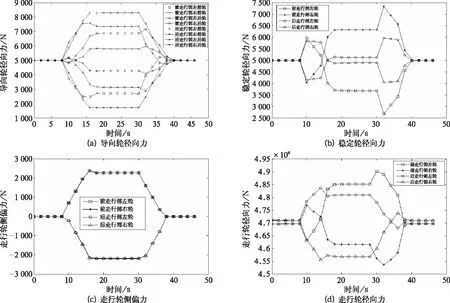
图9 R100 m曲线走行部各轮载荷变化曲线
2.3 运行平稳性
这里采用Sperling指标来评价该新型跨坐式单轨车辆的平稳性。由于缺少跨坐式单轨车辆的轨道不平顺谱相关资料,这里采用ISO 8608标准A级公路谱谱来模拟轨道不平顺,得到车辆在直线上运行的加速度,然后按GB 5599-85方法处理后得到Sperling指标。
图11给出了在ISO 8608标准A级公路谱激励下(激励谱系数分别取0.5和1),车辆在各速度级的横向和垂向Sperling指标值。从图11中看出:随着速度的增加,车辆的运行平稳性逐渐变差;轨道谱系数为0.5,在90 km/h的速度范围内车辆横向和垂向平稳性指标均小于2.5,平稳性等级为优秀;轨道谱系数为1,在90 km/h 的速度范围内车辆横向和垂向平稳性指标均小于2.5,平稳性等级为优秀。
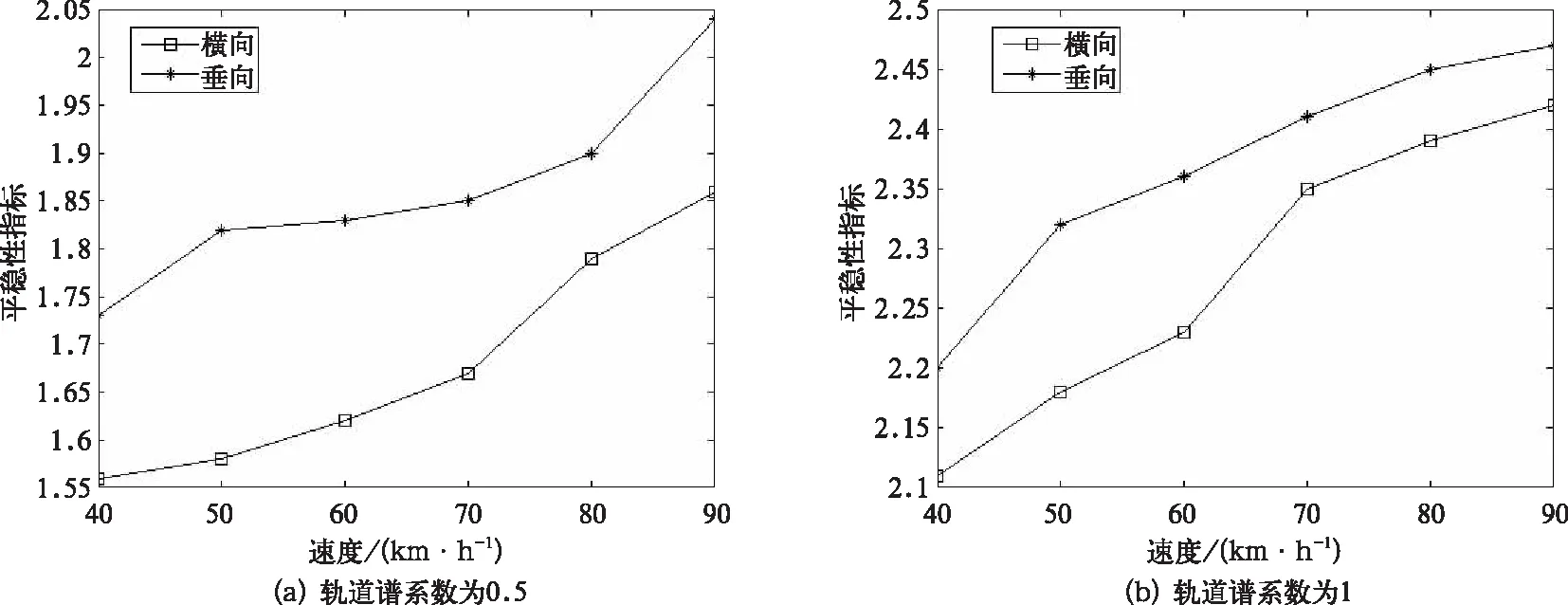
图11 车辆的Sperling指标
3 结 论
文中设计了一种基于转臂式摇枕的跨坐式单轨车辆单轴走行部,其悬挂方式采用转臂式摇枕空气弹簧结构,实现垂向减振;横向悬挂采用吊杆,依靠吊杆的横向摆动提供横向弹性,依靠吊杆的纵向摆动适应曲线通过时车体与转向架的变位;牵引电机设置在构架侧梁的外侧,减速齿轮装置与牵引电机分别设置在走行轮的两侧。
利用多体动力学软件UM建立跨坐式单轨车辆动力学模型,通过仿真分析其动力学性能。动力学分析表明:文中设计的跨坐式单轨车辆具有良好的曲线通过性能;轨道谱系数分别为0.5和1时,90 km/h的速度范围内单轨车辆的垂向和横向平稳性指标均为优秀。
[1] 仲建华.跨坐式单轨交通在我国的应用和创新[J].都市快轨交通,2014(2):1-5.
[2] 肖俊.单轨交通应用性分析[J].电力机车与城轨车辆,2013(4):20-23.
[3] 刘绍勇.重庆跨坐式单轨转向架的研制[J].铁道车辆,2003(9):18-21.
[4] 任利惠,周劲松,沈钢.跨坐式独轨车辆动力学模型和仿真[J].中国铁道科学,2004(4):26-31.
[5] 彭立群,林达文,吴兴磊,等.跨坐式单轨车转向架牵引机构试验设计与研究[J].铁道机车车辆,2014,34(2):70-73
[6] 夏赞鸥.庞巴迪单轨关键技术的改进与革新[J].现代城市轨道交通,2016(2):97-100.
