直道高速超车安全转向幅度仿真研究
2018-03-06郑琦巍
田 丰, 张 振, 郑琦巍, 罗 勇, 余 飞
(1.江西江铃集团晶马汽车有限公司 技术中心, 南昌 330052; 2.江西博能上饶客车有限公司 技术中心, 江西 上饶 334000)
随着我国高速公路网络的日益完善,汽车高速行驶成为常态,高速下因超车换道不当引发的交通事故时有发生。为降低因超车换道不当引起的道路交通安全问题,常见的研究内容包括驾驶意图、超车换道阶段、车辆运动学、模糊评判及神经网络方法、有关驾驶员性格特性的超车模型等[1-5]。笔者拟采用Adams和Simulink软件仿真分析高速下的超车过程,以确定其转向盘转角幅度变化的安全范围。
1 高速直道超车特性分析
1.1 高速直道超车条件的确立
依据文献[6]中的相关规定,高速公路的设计车速为80~120 km/h,行车道宽度为3.75 m。为研究汽车在高速行驶状态下进行直道超车过程中转向盘转角的最大许可值,采用双移线试验,模拟高速公路直道上超车后迅速返回原车道的典型超车过程。依据文献[7]的标准设计路径如图1所示。
图1中:S0=50 m;S1=15 m;S2=35 m;S3=60 m;S4=35 m;S5=30 m;S6=50 m;变道距离D=3.75 m;标杆宽度B1=1.1b+0.25 m,B2=1.2b+0.25 m,B3=1.3b+0.25 m,其中b为车宽。
为便于讨论,特作如下要求:
1) 车速研究范围为80~120 km/h,研究中忽略转向间隙的影响。
2) 为防止超车时驶出超车道,汽车横向位移应不超过3.75 m。
3) 超车过程中不受其他车辆的影响,被超车辆在S1、S2、S3、S4区域行驶,超车过程中不发生碰撞。
为实现汽车在高速下超车的仿真试验,特选取某车进行研究,该车主要参数如下:整备质量为 1 308 kg,其中前轴荷774 kg,后轴荷534 kg;满载质量为1 678 kg,其中前轴荷883.3 kg,后轴荷794.7 kg;整车尺寸为长4 162 mm、宽1 813 mm、高1 634 mm、轴距2 561 mm、前轮距1 562 mm、后轮距1 562 mm;前悬架弹簧刚度为27.7 N/mm、后悬架弹簧刚度为20.5 N/mm。
1.2 整车仿真模型建立
采用虚拟样机技术,在Adams环境下将分析车辆作必要的简化,并以数学模型的形式体现。其简化要求如下:
1) 悬架的简化。分析试验车的前后悬架均为独立悬架,建立悬架子系统时各关键点的坐标均通过查看设计图纸得到,减振器、弹簧、橡胶衬套等参数通过实验得到。
2) 转向系的简化。将转向盘和转向柱管简化为可绕车身转动的物体,只考虑转向传动轴绕车身的转动,用万向节将转向轴与转向传动轴之间进行连接,左转向节绕左主销的转动角度θl(rad)以及转向传动轴绕车身转动的角度θi(rad)之间用角位移关系约束连接,约束关系为:
θi=iθl
式中:i为齿轮齿条式转向系的角传动比,i=14.9。
左右转向节绕各自主销转动的角度关系由转向梯形机构来保证,如下式所示:
式中:θr为右转向节绕右主销转动的角度,rad;L为轴矩,m;B为两侧主销轴线与地面相交点间的距离,m;a为转向系数,a=1表示左转向,a=-1表示右转向。
3) 轮胎的简化。对轮胎参数的选择决定着汽车转向过程的转向特性(不足转向、中性转向、过度转向)。鉴于轮胎既不是完全刚体也不是完全柔体的特点,特采用一组数学公式表示轮胎的特征,本研究采用PAC轮胎模型。
4) 动力总成简化。采用Adams自带的动力系统外形模型,传动轴的万向节滑动叉与发动机的动力输出轴通过万向节相连,万向节滑动叉与套管通过滑动约束相连,套管与主减速器转动轴通过万向节相连,主减速器转动轴和左右半轴绕后桥转动,主减速器转动轴角速度w0和左、右半轴转动的角速度wl、wr满足以下关系:
2w0=i0(wl+wr)
式中:i0为主减速器的传动比。
5) 整车模型装配。根据各总成之间的连接关系,在Adams环境下建立相应的数据通讯接口,实现各总成之间的安装连接关系和数据的传递功能。将建立好的各子模块,通过建立的通讯器连接到一起,其中车身简化为一个同质量的刚性圆球。整车装配模型如图2所示。
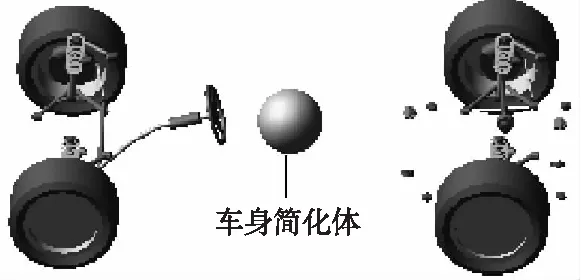
图2 试验汽车装配模型
1.3 高速直道超车过程仿真分析
根据图1设计的路径,编写驱动文件(仿真试验条件)。进入Adams/Car仿真环境,进入Standard Interface模式,单击菜单中“File”,“Import”,在“File to read”中右击查找整车模型并导入,单击菜单栏中“Simulate”,“Full-Vehicle Analysis”,“Course Events”,“ISO lane change”命令,将创建的仿真试验条件导入Adams环境,并设置分析车辆的行驶速度 110 km/h 进行高速超车仿真分析试验,其他设置如下:在“Output Set Size”中设置仿真步长为0.01 s,并单击“OK”按钮,此时Adams/Car开始求解,然后单击“Close”按钮,单击“F8”进入后处理模块,查看仿真结果。试验车辆分别以80 km/h、90 km/h、100 km/h、110 km/h、120 km/h的车速完成直道超车过程,其转向盘转角随时间变化关系如图3所示。
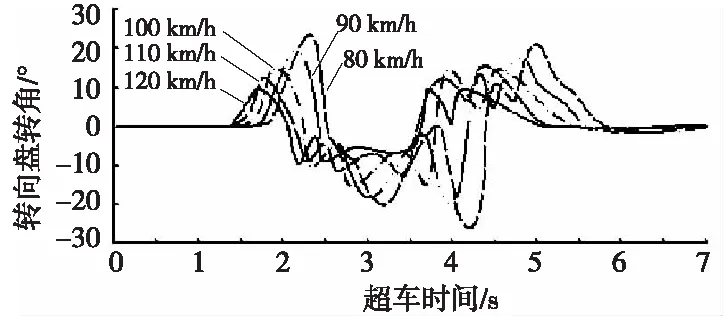
图3 5种车速下超车时转向盘转角随时间的变化关系曲线
图3表明:高速直道超车过程中,随着车速的增加,转向盘的最大转角值将降低;通过在Adams/Postprocessor界面中单击“plot track”功能按钮查看图3中在80 km/h、90 km/h、100 km/h、110 km/h、120 km/h 5种车速下对应的转向盘转角幅度最大值分别为24.8°、21.2°、13.7°、11.9°、9.6°。
2 高速直道超车轨迹验证分析
为检验上述仿真分析结果的可行性,并鉴于汽车高速直道超车试验过程的安全风险,特结合本团队前期研究的基于Simulink的汽车直道超车运动轨迹模型对高速超车过程转向盘转角最大值的仿真结果进行验证[8]。
汽车直道超车运动轨迹模型采用将轮胎魔术公式和三自由度车辆动力学模型相结合的方法,推导出汽车进行直道超车过程中的运动轨迹数学方程,在Matlab/Simulink环境下进行模型构建与仿真,并在40~80 km/h车速下进行直道超车试验,试验结果与仿真结果较为吻合,证明了前期仿真模型的正确性。为此,本研究以前期模型为基础,探讨高速仿真结果。
将图3所示的5种车速下的转向盘转角随时间而变化的数据分别导入前期模型中的W模块(转向盘转角输入模块),并在M文件中对车速进行相应的设定,仿真得到基于Simulink的汽车高速直道超车轨迹曲线,如图4所示。

图4 5种车速下的直道超车轨迹
通过将基于Adams的直道高速超车转向盘转角随时间而变化的仿真数据导入前期建立的汽车超车运动轨迹模型,仿真得到对应的直道高速超车运动轨迹,不难看出:分析车辆在5种车速及相应的转向角驱动下,其最大横向位移均约为3.75 m,且符合高速直道超车建模条件。该仿真结果验证了基于Adams的高速直道超车仿真模型的准确性。
3 结 论
1) 汽车在高速下进行直道超车,其转向盘转向角幅度大小是影响超车安全性的一个主要因素。
2) 80 km/h、90 km/h、100 km/h、110 km/h、120 km/h 5种车速下进行直道超车时的转向盘转角最大值可初步标定为24.8°、21.2°、13.7°、11.9°、9.6°,实际标定中需要考虑相应车辆的转向间隙。
3) 直道高速超车安全转向幅度仿真研究为高速下超车安全性的改善提供数据支撑,也能为衡量高速超车过程中是否驾驶得当提供定量参考。
[1] 张良力,吴超仲,黄珍,等.面向安全预警的机动车驾驶意图研究现状与展望[J].交通信息与安全,2012,30(3):87-92.
[2] 柏伟,李存军.基于不同限速条件下的超车模型研究[J].交通运输系统工程与信息,2013,13(2):63-68.
[3] 游峰,张荣辉,王海玮,等.基于纵向安全距离的超车安全预警模型[J].华南理工大学学报(自然科学版),2013,41(8):87-92.
[4] 方勇,郭忠印.双车道公路机动车交通行为安全评估模型[J].同济大学学报(自然科学版),2013,40(10):1490-1496.
[5] 黄慧琼,覃运梅.考虑驾驶员性格特性的超车模型研究[J].广西师范大学学报(自然科学版),2015,33(1):20-26.
[6] 中华人民共和国交通运输部.公路工程技术标准:JTG B01-2014[S].北京:人民交通出版社,2015:1.
[7] Passenger cars. Test track for a severe lane-change manoeuvre:ISO 3888-2:2011 [S/OL].[2017-05-20].https:∥www.iso.org/standard/57253.html.
[8] 张振,郑安文,张良力,等.直道超车过程大角度快速转向安全性分析[J].中国安全科学学报,2015,25(6):46-50.
