一种轮胎转动惯量试验机电控系统设计
2018-03-05蒋东霖郑家龙
蒋东霖,郑家龙
(长春师范大学工程学院,吉林长春 130032)
1 设计背景
随着科技的发展和人们对轮胎的相关领域的认知度增加,轮胎在车辆机械工程、农业机械工程和航空工程中的生产要求也逐渐提升,人们对轮胎本身特性的研究需求也日益增高。
轮胎运动时的转动惯量是在轮胎生产制造中相当重要的数据之一。轮胎的转动惯量在车辆的牵引性能、制动性能、仿真性能等研究中有重要意义。轮胎的转动惯量拥有两种形式:一种是绕轮胎的旋转轴的转动惯量值,另一种是轮胎在做侧偏运动时的转动惯量值。据调查,测量轮胎的侧偏运动的转动惯量数值的仪器有一定的技术欠缺,设计轮胎转动惯量试验机可以弥补这一空白。为了使这种试验机能够更准确、自动化地完成数据采集与分析,本文做出如下设计。
试验机的工作原理是依靠控制电机和电磁离合器来启动试验机,而电机如果是人为手工操作,只能做到粗略的数据采集,使最后算出的值拥有很大的容差值。为了使试验机的数据更加精确,本电控系统设计运用单片机控制系统,加上装配其他相关元件在试验机的每一个数据装置接口,使电机易于控制,并且控制更加精准,精确度达到1度,以达到精确的测量轮胎侧偏运动时的转动惯量,更好地服务于机械领域。
2 总体设计方案
在电控系统设计中,集成电路芯片选择单片机控制。单片机选择AT89S51,因为单片机AT89S51的性能相当优越,是一种低功耗的具有4KB在线课编程Flash存储器的单片机。它与通用80C51系列单片机的指令系统和引脚兼容。片内的Flash可允许在线重新编程,也可使用非易失性存储器编程。它将通用CPU和在线可编程Flash集成在一个芯片上,形成了功能强大、使用灵活和具有较高性能性价比的微控制器。选择此芯片可以灵活地与蓝牙接收器、LED等元件串联在一起,使系统更加便捷。
在编译程序之前,构思程序设计流程图,决定好先后逻辑顺序,再根据流程画出电路原理图。编译仿真软件选择使用Keil进行编译,Keil2的优点是可以直接编译C语言程序,虽然C语言的代码效率比汇编要低,占用空间大,但C语言可以开发很复杂的程序,可以轻松实现浮点运算。在程序编译之后进行仿真调试、录入调试等,仿真软件选择Protel 99se进行仿真,方便检查系统是否出现错误。
所需设备还装配有LED灯、舵机和蓝牙接收器等。其中,LED灯的作用是用来客观地表现出整体试验机内部装置是否已经达到预想位置,当舵机到达预定位置1时灯灭,当舵机到达预定位置2时灯亮,从而客观表现出虚拟的电控系统的进程。蓝牙的作用是收发数据,将设定好的时间等数据传到单片机中,启动程序的运行。舵机在本试验机中连接电磁离合器,舵机带动单片式电磁离合器,使得弹性杆发生扭转。精确地控制舵机的转速在整个装置中有很重要的意义,所以需要通过单片机电控系统准确控制舵机的运转。整个电控系统的工作流程为:首先单片机通过接受蓝牙传递来的命令,输入命令之后,通过编译的程序,把输出的数据传递到舵机,控制舵机达到要求的转速,完成后将数据输出到相关元件,并由LED灯的亮灭来客观显示程序进行到哪一流程。由于单片机控制数据的输入和输出,减少了人员的手动操作,也减少了转动惯量的误差,达到准确、自动地控制仪器,并获取相对精确的最终测量结果的目的。
编译程序如下:
/*******************************************
UNO与蓝牙接口 VCC--+5V GND--GND TX--RX RX--TX
UNO与舵机接口 VCC--红色线 GND--黑色线 9--黄色线
UNO与LED接口 7--LED正 6--LED负
*******************************************/
#include
第一方面:营造幽静舒适物理环境,如可提供多种休闲空间(双人的、小组型、大型的),在休闲空间配置便捷的电脑、投影仪等网络设备;并在休闲空间配有桌椅、沙发、台灯,摆放都是可以移动的。为大学生网络休闲活动开展提供活动场所,提供便利的客观条件,以弥补大学生休闲设备的缺失。如武汉大学图书馆开辟双人“卡座”、“研修室”、“音乐厅”,崭新的沙发配上网络设备,以备大学生学习休闲之用。
unsigned char Rcv_data=0; //存放蓝牙接收命令
Servo myservo;
unsigned char Position1=80; //位置1定义在80度,可根据实际情况改动
unsigned char Position2=110; //位置2定义在110度,可根据实际情况改动
void LED_ON() //LED亮
{ digitalWrite(9, LOW);digitalWrite(10, HIGH);
}
void LED_Off() //LED灭
}
void setup()
{
pinMode(9, OUTPUT); //pin9为输出模式
pinMode(10, OUTPUT); //pin10为输出模式
Serial.begin(9600); //串口波特率9600
myservo.attach(9); //pin9驱动伺服电机
myservo.write(Position2);//先使伺服电机处于位置2
delay(500); //延时0.5秒
}
void loop()
{
while(Serial.available() )
{
Rcv_data = Serial.read();//读取接收到的命令
Serial.println(Rcv_data);//串口数据回传
if (Rcv_data==‘U’) LED_ON();
if (Rcv_data==‘V’) LED_Off();
if (Rcv_data==‘X’) myservo.write(Position1);
if (Rcv_data==‘Y’) myservo.write(Position2);
}
}
3 结构原理分析
3.1 工作原理
设备通过单片机控制舵机达到规定的转速,带动单片式电磁离合器,使弹性杆发生扭转,当达到规定转速、规定位置之后,通过电控系统的控制,停止对电机供电,使单片式电磁离合器中间松脱,弹性杆恢复形变,从而带动弹性杆中部螺纹杆两侧的轮胎做类似侧偏运动。并且当试验机未到达预先规定好的位置1时,整个系统会控制时LED灯断电,当试验机的舵机到达规定位置2时,控制系统使LED灯通电发光。整个装置将会通过安放在螺纹杆一端的霍尔开关记录次数。通过记录的这些数据,运用相应公式就可以把轮胎做侧偏运动时的转动惯量准确地计算出来。
3.2 电路原理图
通过电控系统的工作原理,构思出电路原理图,如图1所示。
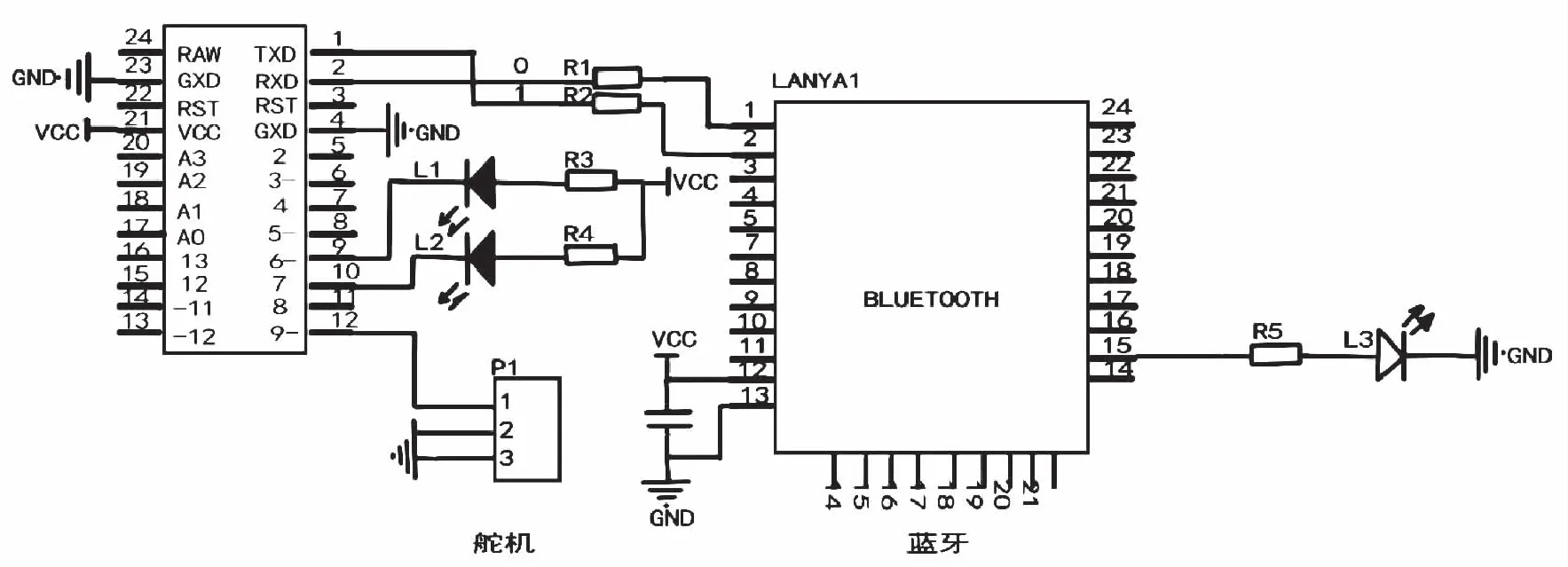
图1 电路原理图
3.3 程序设计流程图
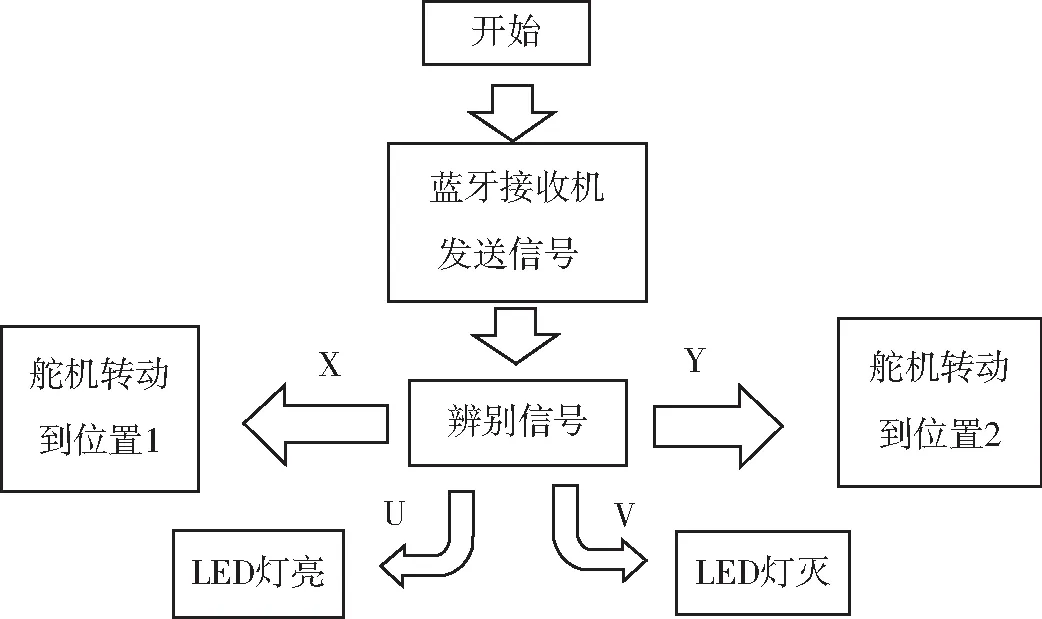
图2 程序流程图
4 结语
本试验机电控系统可以让轮胎转动惯量试验机更加准确、自动化地完成测量工作,并可以将装置的进程反映到LED灯的亮、灭两种状态上,能更方便地从LED灯中的信息反映出轮胎转动惯量试验机的工作状态。并且,本系统能更有效、更精确地控制舵机达到规定的转速,从而达到舵机带动单片式电磁离合器的精准度要求。综上所述,该轮胎转动惯量试验机应用此控制系统一定会达到更好、更精准的效果。
[1]刘淑荣.单片机原理及应用[M].北京:中国电力出版社,2011.
[2]张毅刚.MCS-51单片机应用设计[M].哈尔滨:哈尔滨工业大学出版社,2007.
[3]黄宁.单片机接口技术实用子程序[M].北京:北京人民邮电出版社,2005.
[4]彭伟.单片机C语言程序设计实训100例[M].北京:电子工业出版社,2009.
[5]冯博琴.微型计算机原理与接口技术[M].北京:清华大学出版社,2011.
[6]马忠梅.单片机的C语言应用程序设计[M].北京:北京航空航天大学出版社,2007.
