移动机器人行走机构
2018-03-05肖佳涛雷泽勇覃倩倩
肖佳涛, 雷泽勇, 覃倩倩
(南华大学机械工程学院,湖南衡阳 421001)
0 引言
随着核工业的发展,核应急与巡检机器人的研究与开发愈发重要,采用机器人代替人进入核电站开展日常监测和维护工作,具有广阔的应用前景。
移动机器人行走机构搭载并保护机器人核心控制部件和功能设备,受控于控制部件,可以在规定工作路面上行走,是机器人的主要机械系统。移动机器人底盘需具有一定的承载能力和规定的运动性能。
移动机器人按行走方式来分,可分为轮式、履带式、复合式。
1 轮式移动机器人
轮式移动机器人的行走机构由车轮为主体。轮式的机械结构相对最为简单,驱动及控制的设计比较方便,承载量大,移动的速度快,运动效率很高,比较灵活,自重较轻。轮式的缺点是运动稳定性受路面的情况影响很大,对于复杂路面很难通过[1]。
一般按车轮的数量可以将轮式移动机器人分为单轮、双轮、三轮、四轮。不同的车轮数量,底盘的结构及移动配置有很大的不同。轮子数量较少的底盘稳定性较差,但灵活性更强,体型会更小。
1.1 单轮滚动机器人
单轮滚动机器人体积小,摩擦小,灵活性很大,但单轮要保证动态稳定,其稳定性不易控制。一般工作于一些较为复杂、狭小的地形[2]。
实例:美国卡内基-梅隆大学研究了“陀螺稳定”式单轮机器人,如图1所示,左侧为初代设计GyroverⅠ,右侧为改进设计GyroverⅡ。作为一个侦察机器人,Gyrover可以利用其超薄体型通过狭窄的通道进行作业。另一个潜在的应用是作为一个高速月球车,在气动干扰和低重力的情况下将可以高效、高速滚动[3]。
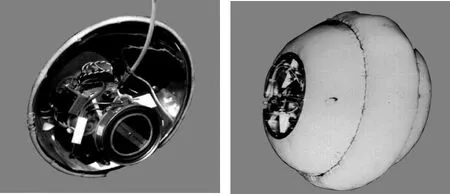
图1 “陀螺稳定”式单轮机器人(Gyrover)
1.2 双轮移动机器人
双轮移动机器人常分为自行车式和双轮左右对称分布式。
自行车式的移动机器人,车型窄长,是一个非线性自然不稳定的系统,在保证侧向稳定性控制问题上的研究比较困难。自行车式机器人主要工作于狭长、平稳的路面上,其越障能力很差[4]。
实例:日本东京工业大学M.Yamakita与Utano[5]于2006年研制了具有平衡质量调节器的自行车式机器人,特别研究了在低速下自动控制自行车的稳定。如图2所示,左侧为原理模型图,右侧为外形图。
双轮对称分布式机器人同样需要考虑自平衡,其优势在于体型矮小,运行比自行车式更为灵活,适合在狭小空间工作[6]。
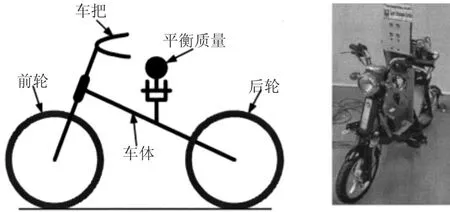
图2 M.Yamakita与Utano自行车式机器人

图3 瑞士联邦工学院双轮机器人(JOE)
实例:2002年瑞士联邦工学院Felix Grasser等[7]研究了无线控制的双轮机器人(JOE),每个轮子分别由一个电动机驱动,能实现自平衡,在平地上自由移动,可以爬30°斜坡。如图3所示,左侧是实物外形图,右侧为机器人状态矢量空间的变量定义和干扰分析图。
1.3 三轮及四轮移动机器人
由于三点决定一个面,三轮移动机器人的平稳性比单、双轮式的好。三轮式机器人常采用1个中心前轮,2个对称分布的后轮,呈简单的等腰三角状,这种布局最为稳定。而四轮式的机器人最为常见,结构设计、驱动系统和控制系统都最为容易实现。三轮及四轮的机器人结构稳定,其承载能力较单、双轮式有了很大的提高。但是三轮及四轮式的机器人在坑洼的路面上移动会很颠簸。三轮及四轮式的机器人适合在负载要求大、移速要求高,但路面较平整的情况下工作,其应用范围最为广泛。
2 履带式移动机器人
履带式机器人相对于普通的轮式机器人,其结构比较稳定,在不平整的路面上,仍然能够相对稳定地前进。
履带式机器人的突出优势在于:1)有较大支撑面积,接地比压小,能够在松软甚至泥泞的场地作业,下陷度小,越野机动性能很好;2)转向半径非常小,可原地转向;3)履带支撑面上有履齿,有效避免打滑,附着性能好,能够提供较大的牵引力;4)承载能力很大。
但由于履带式机器人没有转向机构,转弯时只能依靠左右2个履带差速转向,摩擦阻力大,外侧履带易磨损,且回转半径不易准确地确定。履带式机器人由移动机构限制,体型比较大,功耗比较大,传动效率不高,通常只能保持低速状态运行。故履带式机器人适合在路面条件较差、负载要求高,但速度要求较低的情况下工作。
履带式机器人底盘一般分为单节双履带式、双节四履带式、多节多履带式[9]。
2.1 单节双履带式机器人
单节双履带式由2条可变形的履带组成,分别由2个电动机驱动。机器人通过2条履带差速实现转向。当2条履带同步运动时,机器人前进或后退[10]。
实例:中国航天科工集团第四研究院探测与控制技术研究所研制出的“雪豹20”排爆机器人,如图5所示,采用了单节双履带式底盘,在野外崎岖的复杂道路上仍可以正常运行,这取代了人工在野外进行危险物的搜索和排除,能够抓取15 kg以内的危险品,大大降低了人员的伤亡[11]。
2.2 双节双履带式机器人

图4 “雪豹20”排爆机器人
双节双履带式机器人是由转向铰接机构将前、后两节车体连接起来。其越障能力比单节式更优,双节的车体结构,可以让其能够实现爬梯等特殊越障工作,但控制上的设计变得更为复杂。
实例:日本千叶工业大学和日本东北大学研制的Quince机器人就是采用双节双履带式底盘,如图5所示。福岛核事故发生后,Quince机器人曾6次深入原子能反应堆内部调查情况,克服反应堆地下复杂地形[12]。

图5 Quince机器人
2.3 多节多履带式机器人
多节多履带式机器人常用于爬越较高障碍物或跨域较宽的沟壑,其能够多姿态调整,灵活性很强,但在结构和控制上的设计会很复杂,并需保证越障过程中静止状态下无回滑现象[13-14]。

图6 三节六履带式移动机器人越障实验图
实例:上海交通大学针对核工业管道内壁检测需求,研制了三节六履带式移动机器人平台[15]。其能够完成管道中沟道、台阶的跨越。如图6所示,为该三节六履带式移动机器人越障实验图。
3 复合式移动机器人
复合式底盘是将两种或者更多种基本底盘形式进行融合,结合基本底盘各自的优点,使机器人拥有更高的综合性能,能攀爬一些特殊地形,复合式底盘机器人也是现在很多学者研究的重点。但复合式机器人,结构复杂,研究困难,制造成本比较大。
较常见的复合式机器人有:1)轮腿复合式移动机器人,具有轮式机器人的稳定性以及腿式机器人的强越障能力。RHex、Whegs等机器人是典型的代表。2)轮履复合式移动机器人,轮实现高速远距离运动,履带实现适应各种复杂的地形,进一步增强环境适应能力[17]。3)轮履腿复合式移动机器人结合更多的因素,结构更复杂。
应用实例:以色列艾尔比特系统公司研制的地面侦测机器人VIPER如图7所示,VIPER采用的是轮履复合式行走系统,可以根据不同的路况,依靠内置的变形机构实现轮、履带的转换。这种轮履复合式机器人的设计大幅度提高了机器人的地面适应能力,从而保证了机器人高效完成任务[18-20]。

图7 地面侦测机器人VIPER
4 结 语
本文主要分析了移动机器人行走机构分类情况。对于不同的工作情况,需要选择适用的行走机构:1)工作环境狭小,并要求机器人能高速移动,不需要重载,可以选择单轮滚动式机器人;2)工作路面平缓,需要机器人非常灵活地工作,可以选择双轮对称分布式机器人;3)工作路面较平缓,要求机器人有一定承载能力,稳定性好,移动速度要快,可以选择三轮或四轮的机器人;4)对于承载能力要求比较高,路面情况比较差,但对移速要求较低的,可选履带式机器人;5)对于工作路面非常恶劣,要求跨沟、越阶,越障能力要求较高的,可选择多节多履带式机器人;6)要求机器人拥有很高的综合性能,或需要翻越特殊的障碍,或需要机器人能改变移动的方式等,可以设计适用的复合式移动机器人。
核巡检与应急机器人,需要有一定的承载能力,对移动速度要求不是很高。在平常情况下,其工作路面比较平整;在应急状态下,其工作路面可能会存在一些小障碍。结合实际情况及成本考虑,最终选用单节双履带式的底盘结构。
[1] 张珍珍.轮式移动机器人研究综述[J].电子技术与软件工程,2016(23):120.
[2] 胡攀辉.独轮机器人机械本体机构研制[D].哈尔滨:哈尔滨工业大学,2013.
[3] FERREIRA E,SHU-JENTSAI,PAREDIS C J,et al.Control of the Gyrover:a single-wheel gyroscopically stabilized robot[J].Advanced Robotics,2000,14(6):459-475.
[4] 石文辉.自行车机器人的建模与滑模变结构控制[D].西安:西安电子科技大学,2012.
[5] YAMAKITA M,UTANO A,SEKIGUCHI K.Experi ment al Study of Automatic Control of Bicycle with Balancer[C]//Ieee/rsj International Conference on Intelligent Robots and Systems.IEEE,2006:5606-5611.
[6] 田重阳.两轮自平衡机器人的运动控制方法研究与实现[D].北京:北京工业大学,2016.
[7] GRASSER F,DARRIGO A,COLOMBI S,et al.JOE:a mobile,invertedpendulum[J].IEEE Transactions on Industrial Electronics,2002,49(1):107-114.
[8] 胡桐.四轮独立驱动和转向移动机器人的设计与控制[D].合肥:合肥工业大学,2015.
[9] 蔡婷.针对履带式移动平台的运动控制系统设计[D].成都:成都理工大学,2016.
[10]吉洋,霍光青.履带式移动机器人研究现状[J].林业机械与木工设备,2012(10):7-10.
[11]袁浩钊.履带式排爆机器人运动控制系统设计与实现[D].广州:华南理工大学,2016.
[12]佚名.参与福岛核电站救援的日本机器人[J].传感器世界,2011(6):40-41.
[13]吴玉,顾毅,董鹏飞.核电站环境监测履带式移动机器人设计与研究[J].机器人技术与应用,2016(3):41-45.
[14] 荣杰,钱瑞明,刘庆龙.履带式救援机器人行走系统设计[J].机械制造与自动化,2011(3):132-134,174.
[15] 庄皓岚,颜国正,王志武,等.多节履带式机器人系统组成和越障性能研究[J].测控技术,2013(8):59-62,66.
[16] 王朝阳,胡淼,汤永红.轮履复合式移动机器人设计及越障功能分析[J].机械传动,2010(4):38-41.
[17] 田海波,马宏伟,张一澍,等.轮履复合式机器人的设计与实现[J].组合机床与自动化加工技术,2015(7):15-18.
[18] 李智卿,马书根,李斌,等.具有自适应能力轮-履复合变形移动机器人的开发[J].机械工程学报,2011(5):1-10.
[19]李浩.一种轮履复合救援机器人底盘的动力学分析与优化[D].天津:天津理工大学,2015.
[20]黑沫.可变形履带机器人设计与运动分析[D].长沙:国防科学技术大学,2010.
