新型高速公路车载式绿篱机结构分析
2018-03-05倪磊郭翔靖易
倪磊 , 郭翔, 严 靖易
(西南科技大学制造科学与工程学院,四川绵阳 621010)
0 引言
高速公路中央分隔带位于高速公路中央,具有分隔交通、防止眩光、诱导视线等功能[1]。高速公路中央分隔带是与驾乘人员距离最近的单元,其绿化的质量直接影响整条道路和覆盖区域的建设管理水平[2],同时对净化空气,减少污染、降低噪声、改善地温与气温等方面有着一定的作用[3]。
绿化植物是生长型植物,需要定时养护和修理,由于植物生长参差不齐,可能会阻挡交通标志牌或者影响驾驶员的视线[4]。因此,绿篱的修剪和管理是一项很重要的任务。因为高速公路有车流量大、车速快、路程长等特点,所以在高速公路进行人工修剪有危险性高、劳动强度大、耗时长等弊端[5]。而车载式绿篱机修剪能够克服其中一些弊端,因此车载式绿篱机修剪代替人工修剪已经成为一种趋势。目前我国现有的车载式绿篱机存在如下问题:1)自动化程度低;2)噪声大,造成噪声污染;3)工人劳动强度大;4)修剪效率不高,无法三面一次性成型修剪。
针对车载式绿篱机的上述缺点,拟设计一种自动化程度高、工作效率高、污染小的新型车载式绿篱机[2]。
1 绿篱机结构设计
1.1 绿篱机设计目标
设计的绿篱机可以装载在普通货车后槽,作业场地是高速公路和城市公路,作业对象是高速公路中央隔离带和城市公路绿化带[6]。根据作业对象的性质和特征,绿篱机设计目标如下:1)绿篱机以自动化程度高的修剪模式取代劳动强度大的传统人工修剪模式,采用PLC实现自动化控制,提高工作效率。2)能够对绿化带的3个所需要修剪的面进行一次性成形修剪,以提高修剪效率。3)绿篱机修剪宽度可根据实际绿化带宽度调整。4)绿篱机能够躲避绿化带中间的障碍物,如树木、标志牌等。
1.2 绿篱机各部分结构设计
1.2.1 高度升降结构
为实现绿篱机高度可调的功能,决定采用剪式升降机构[7],图1为结构简图及模型。该机构通过较小的液压伸缩行程,实现0~700 mm的高度调整。
1.2.2 机械臂结构
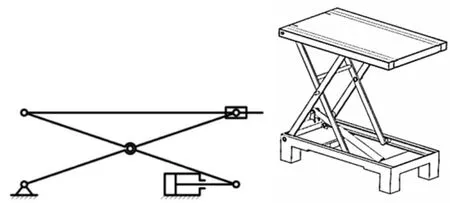
图1 剪式升降结构简图及模型

图2 机械臂结构简图及模型
为实现绿篱机与绿化带之间的距离能够调整,决定采用平行四边形机械臂调整距离。该机构不仅能够简化机械结构,还能保持绿篱机的修剪角度,以保证修剪效果。机械臂的两个极限位置如图2所示,图中机械臂选用行程为150 mm的液压缸,机械臂的高度调整范围为475 mm,水平位置调整范围250 mm,机械臂与水平面的夹角在13°~42°之间变化。
1.2.3 修剪避障结构
修剪机构的修剪避障结构为六杆机构,结构简图如图3所示,图中表示出该结构的两个极限位置,修剪导轨能够相对于连杆做旋转动作。液压缸全行程收缩时,拉动杆1和杆2旋转,使得修剪导轨相对于连杆做出角度为90°旋转动作,进而实现避障。修剪导轨旋转之前结构如图4所示,旋转之后结构如图5所示。液压缸的行程为100 mm。六杆机构中,有5个活动构件、7个低副、0个高副,机构的自由度为1,具有确定的运动。

图3 修剪避障结构简图

图4 旋转之前
1.3 绿篱机总体结构
绿篱机的总体结构设计主要包括液压升降台、机械臂机构与修剪机构的设计,采用UG NX三维建模软件建立绿篱机模型,绿篱机结构总体如图6所示。

图5 旋转之后
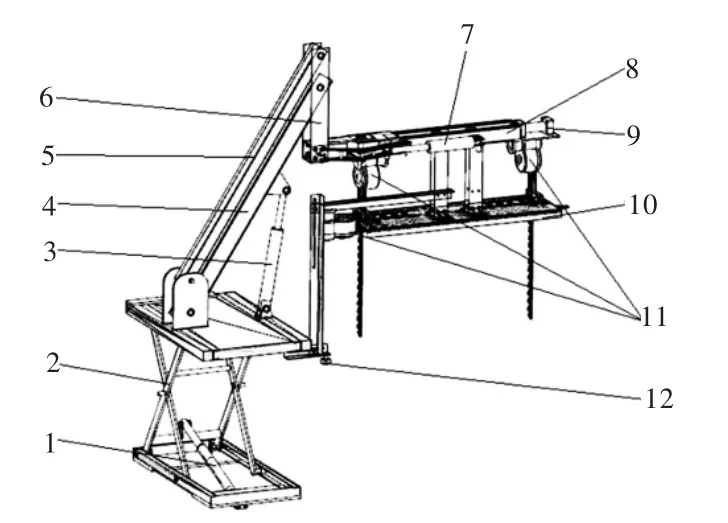
图6 绿篱机结构总体
在液压升降台上焊接一个铰支座,连杆1和连杆2与支座之间分别采用销连接,连杆3与连杆1和连杆2都采用销连接,3个连杆与平台上的支座组成一个平行四边形结构,液压缸2两端与平台支座和连杆1销连接,至此,3个连杆和1个液压缸组成绿篱机的机械臂结构;修剪导轨与连杆3之间采用销连接,修剪刀架顶端安装4个滚轮,安置在修剪导轨中,这样修剪刀架可以在修剪导轨中左右移动;3个锯齿修剪刀具通过螺栓固定在修剪刀架上。
2 有限元分析
2.1 静力学分析
为了验证所设计的结构是否合理,选用的材料是否恰当,使用ANSYS Workbench对结构进行有限元静力学分析,完成强度校核[8]。
首先对模型进行简化,此次有限元分析的重点在于机械臂以及避障机构,因此抑制3把修剪刀具以及承载车辆的模型。
1)网格划分。本项目使用网格生成器Mesh Tool划分网格。对模型的机座采用多区域网格划分方法,以六面体为主导的自由网格类型;通过ANSYS系统对模型的其他部分进行智能网格划分[9]。划分网格后该模型共有361 261个单元,174 876个节点。网格平均质量为0.704 52,图7为网格划分结果图。
2)接触分析。绿篱机大部分元件都是使用销把相关构件连接起来,相互连接的部件是以接触方式传递法向压力与摩擦力。在修剪机构中,刀架与锯齿刀具之间定义为固定接触。所有销连接处定义为不可分离接触。液压升降台设为一个整体,其内部全部定义为固定接触。在螺栓连接部位,螺栓与螺母之间定义为固定接触;螺栓与螺栓孔之间定义为不可分离接触;螺栓与钢板之间定义为摩擦接触,摩擦因数设为0.1。
3)载荷与约束。对于整个绿篱机来说,修剪绿篱带所受到的阻力较小,可以忽略。绿篱机受到的主要载荷为惯性载荷——重力,即9.8066 m/s2。
定义液压升降台的底盘为固定约束。用3个100 N的力代替修剪刀具模型。设置材料的弹性模量为2.06×1011Pa,泊松比为0.3,密度为ρ=7800 kg/m3。

图7 网格划分结果

图8 结果分析
4)结果分析。图8(a)为整体机构的等效应力分布图,其中最大等效应力为57.401 MPa,出现在连杆3与修剪导轨的连接处,根据工程材料资料显示,结构钢Q235屈服极限为235 MPa。满足强度校核。由图8(b)整体机构的总位移图可知,位移最大值为4.4232 mm,位于修剪刀具的右端。绿化带的修剪精度并不是特别高,因此变形量能够满足工作需求量并保证作业时的安全性。
2.2 模态分析
模态分析的作用是确定结构的振动特性(即结构的自然频率和振型),并且为构件的设计提供指导依据,避免外部激励的频率和结构的自然振动频率相同,以防止发生共振[10]。绿篱修剪机的作业过程中,激振主要来自修剪刀具。市面上常见的修剪刀具的电动马达转速为1500 r/min,激励频率为25 Hz。

表1 结构的前6阶振型
将有限元静力学分析的结果导入到模态分析当中,经计算解得前6阶固有频率,见表1,由修剪刀具引起的振动频率位于第5阶和第6阶之间,所以不会发生共振。
3 绿篱机工作过程
第1步:绿篱机在修剪绿篱带过程中,出现标志牌、树木等杆状物体时,定位油缸伸出,固定修剪刀架,使修剪刀架在脱离路牙之后仍能保持在原来的位置上,然后液压升降台上升,令整个绿篱机上升,当刀架上的竖直剪切刀具完全离开绿篱带时,液压升降台停止运动。
第2步:液压缸做伸出运动,使机械臂抬高。提高修剪机构的水平高度。然后液压缸2工作带动整个修剪结构转动90°,完成一次避障。
第3步:承载车前进,直到整个修剪机构至刀架修剪时碰不到障碍物。
第4步:液压缸2带动修剪结构旋转90°,让修剪结构回到原来的位置。液压升降平台下降。承载货车继续前进,带动绿篱机向前,完成剩余的修剪工作。
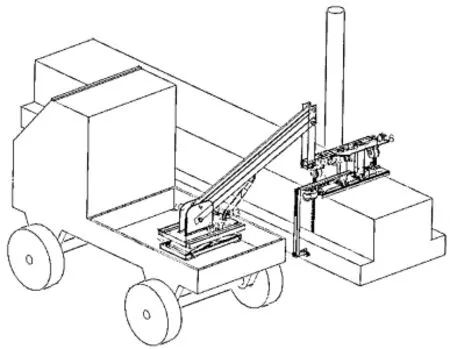
图9 第1步

图10 第2步

图11 第3步

图12 第4步
由于货车在行驶过程中无法保持直线行驶,会对修剪效果产生严重影响。因此在修剪导轨中安装一个拉簧,拉簧一端连接修剪导轨,另一端连接修剪刀架,定位油缸和拉簧的协调运动可以迫使定位导轮沿着路牙石滚动,修剪刀具相对于绿化带的距离保持不变,以保证绿篱机的修剪质量。
4 绿篱机液压参数及控制原理
整个绿篱机依靠液压驱动。考虑到绿篱机需要长时间在户外工作,且普通货车后槽放置空间有限,故选用结构紧凑、体积较小的直流型液压动力单元。液压动力单元与实现相同原理要求的常规液压站相比,它具有结构紧凑、体积小、质量轻、效率高、性能可靠、外形美观、无泄漏、价格便宜等优点[11]。
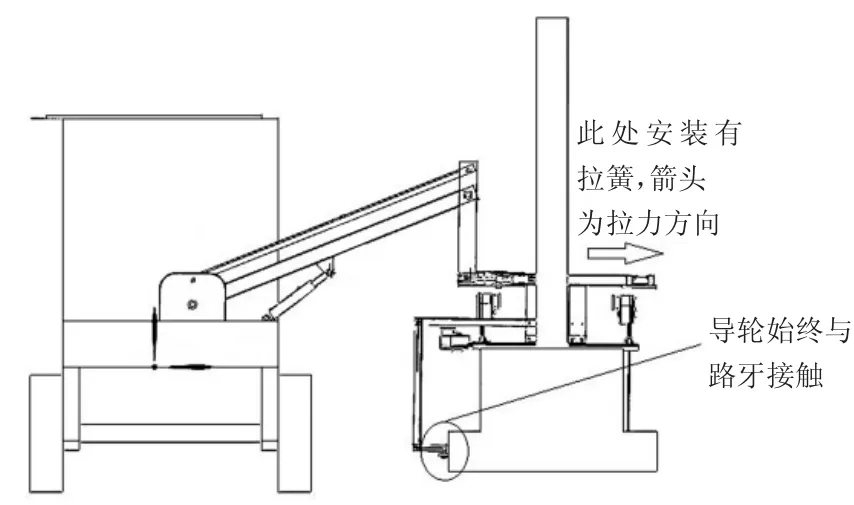
图13 修剪主视图
初选液压动力单元工作压力p为16 MPa[12];液压缸的伸缩速度为1 cm/s;油缸的启动加速度为0.01 m/s2。
4.1 液压缸计算
1)液压缸2计算。当连杆1与水平线之间的夹角如图2所示,由13°上升至42°时,作用在油缸的上的力最大为2158 N。液压缸的实际有效工作面积A1=F1/pμ=141.97 mm2(μ为液压缸的机械效率0.95)。则油缸的直径最小为
2)液压缸3计算[13-15]。液压缸3不会承受机构带来的重力载荷,只需克服零件之间的摩擦力即可,作用在油缸上的力最大为120 N。参照液压缸2的计算方法,油缸的有效工作面积为A2=7.89 mm2,油缸的最小直径为D2=3.17 mm。
4.2 液压泵参数以及电动机的选择
液压马达转速n为1500 r/min,排量V为2.1 mL/min,考虑到系统元件的泄漏量,取系统泄漏修正因数为K=1.1。管道和液压阀的压力损失估取500 Pa。按照液压泵的最大输入功率确定电动机功率,最小功率为

式中:p=16×103MPa;n=1500 r/min;V=2.1 mL/r;μ为液压泵容积效率,取0.9,最后选择功率为1.6kW的电动机。
选用的液压动力单元的液压控制原理图如图14所示。液压动力单元包括4组三位四通电磁换向阀、3组溢流阀、4组单向节流阀、油箱以及液压泵。

图14 液压原理图
5 结论
样机测试之后,修剪机构与绿化带之间的距离可以稳定调节,达到预期的目标。设计的旋转机构可以让修剪机构很好地规避绿化带中的标志牌和树木。修剪机构可以基本完成三面修剪。液压升降台与绿化带之间的距离变化时,绿化带与修剪机构的相对位置能够保持不变,保证了修剪效果。
经测试之后,发现该样机的几个不足之处:1)为了实现三面修剪,必须手动调节修剪宽度,因为修剪刀具是通过螺栓连接固定在刀架上的,所以调整花费的时间比较长;2)修剪刀具运行过程中会产生较大的振动,会影响修剪的效果;3)修剪机构在避障的时候,存在修剪死角。
为了解决上述问题,修剪宽度也可以通过PLC来调整,提高效率;增强结构刚度,减轻振动带来的影响;考虑更合理的刀具运动方式,减少修剪死角。
[1] 杨星,史洁婷.黑龙江省高速公路中央分隔带植物选择与配置[J].北方园艺,2015(7):72-73.
[2] 芮雄.高速公路中央隔离带绿化建设研究[J].城市,2015(5):78-79.
[3] 尹吉光,毛秀红,闫少波.高速公路中央分隔带绿化研究[J].山东林业科技,2003(4):41-42.
[4] 王殿凡.公路绿化行车安全的典型影响[J].交通安全(工程技术),2015(14):100-101.
[5] 张铁,付俊祥,张文海,等.ZLX2-1型高速公路绿篱修剪机[J].工程机械,2006(7):10-12.
[6] 魏倩.双面高效绿篱修剪机的研究与设计[D].南宁:广西大学,2014.
[7] 王德伦,高媛.机械原理[M].北京:机械工业出版社,2011(9):107-108.
[8] 欧阳天成.高速公路绿篱修剪机总体设计与结构优化[D].南宁:广西大学,2012.
[9] 欧阳天成,杨金元,陈树勋.高速公路绿篱修剪机总体设计与结构优化[J].装备制造技术,2012(12):32-33.
[10]韦锦.绿篱苗木修剪机械手的设计与研究[D].南宁:广西大学,2013.
[11] 陈姗姗,潘国军.液压动力单元特性分析[J].机床与液压,2013,41(8):68-69.
[12]冯震.车载式绿篱机液压传动系统优化设计[J].现代制造,2014(15):156-157.
[13] 常同立.液压控制系统[M].北京:清华大学出版社,2014.
[14]朱建公.液压与气压传动[M].四川:西南交通大学出版社,2011(8):51-52.
[15] 钟学凯,姜小亮,向北平,等.新型电动绿篱机设计[J].西南科技大学学报,2015(2):106-110.
