基于定位系统测试的机器人定心装置的结构设计及优化
2018-03-05谢锦娇孔旭影
谢锦娇, 孔旭影
(北京信息职业技术学院,北京 100018)
0 引言
服务机器人已被国家明确指出作为未来优先发展的战略高技术。而随着机器人技术的发展及社会需求的拓展,服务机器人有着广阔的市场:一方面,随着我国逐步进入老龄化社会,助老服务机器人需求将出现井喷;另一方面,服务机器人在公共安全领域如救灾、安防等方面有越来越重要的作用;另外,医疗与教育对服务机器人的需求旺盛,这些都表明我国服务机器人的巨大市场[1]。服务机器人将成为国家提升制造业实力的高技术新兴产业,是未来先进制造业与现代服务业的重要组成部分[2-3]。
而服务机器人在绝大部分应用场景下都需要具备自主移动能力,否则无论助老助残、救灾安防,还是医疗服务、家庭服务、商业服务等方面都会受到巨大的限制。而应用传感器感知的信息实现可靠的定位是自主移动机器人最基本、最重要的一项功能,也是移动机器人研究中倍受关注、富有挑战性的一个重要研究主题[4]。
定位技术包括环境感知、地图匹配、位姿评估(定位)等方面。机器人的定位方式取决于所采用的传感器,常用的传感器有里程计、摄像机、激光雷达、超声波、红外线、微波雷达、陀螺仪、指南针、速度或加速度计等。与此相对应,机器人定位技术可分为绝对定位和相对定位技术。地图的表示方法有拓扑图、特征图、网格图及直接表征法等。位姿估计的方法主要有航位推算法、拓扑表示法、卡尔曼滤波估计、位置占有网格法等。
虽然定位技术涉及到很多方法,但对于整个定位系统效果的测量及评估方法却几乎没有,因此本项目搭建移动机器人的定位系统测试平台,以对不同定位方法有准确的评估,促进定位技术的发展。本文主要研究的定心装置即该定位系统测试平台的一个组成部分。
1 移动机器人定位系统测试平台
移动机器人测试平台如图1所示,由机械部件、电子部件和软件三大部分组成,其中机械部分包括X轴、Y轴两个方向的7 m长的高精度导轨坐标(安装有磁栅尺)、信标架、机器人定心装置(安装有激光测距仪);电子部分包括电脑、激光传感器、机器人接口模块、通信子系统、磁栅尺测量及显示子系统;软件部分包括构建显示电子地图、获取测量数据、进行数据分析、形成评价报告、配置系统五大功能。测试平台系统采用的测量方法主要有磁栅尺读坐标法、激光传感器扫描与等腰三角形定坐标法,此外还有几何中心定心法。定心装置即几何中心定位法的主要执行部件。

图1 测试平台组成示意图
2 定心装置的结构设计
定心装置是几何中心定心法的执行机构,几何中心定心法是指通过使用一个规则的几何图形来估定一个不规则图形中心位置的方法。定心装置相当于一个边长可调的矩形遮罩,对不规则形状的被测机器人夹紧,则矩形的中心可作为被测机器人的几何中心,并以此中心坐标作为机器人的位置坐标,然后用被测机器人的自定位坐标与该位置坐标进行比较评估。同时,定心装置的高度在一定范围里是可调整的,以适应不同高度的机器人。
2.1 定心装置的机械结构方案设计
定心装置要能够对机器人在平面两个相互垂直的方向上手动夹紧(高度方向不需夹紧),同方向的一对夹紧压板能相对定心装置顶板中心位置对称移动,实现被测机器人在二维平面上的手动定心,即顶板中心及被测机器人的几何中心;然后由安装在顶板中心上的激光测距仪配合X轴、Y轴导轨坐标及上面的磁栅尺,测量定心装置中心坐标,并以此作为被测机器人的位置坐标。夹紧压板的移动行程为300 mm,能应用于两个方向尺寸在300~900 mm以内的被测机器人。其次,定心装置高度可调整,能应用于高度在0.4~1.4 m的被测机器人。同时在定心装置的平面中心装有手动转台,可带动转台上的激光测距仪旋转。
在总体结构方案上,定心装置采用铝合金材料为主,由定心机构、伸缩机构、转台结构组成。定心机构是核心机构,定心装置的功能主要由定心机构实现,分两个相互垂直的方向对称夹紧机器人,因此当夹紧机器人时,定心结构的中心就是机器人的中心。伸缩机构是为了满足不同高度的机器人而设计的,由2块可以相对滑动的U型铝合金板,通过侧面孔用螺栓固定以锁定高度。转台机构为安装在定心装置平面中心的手动旋转台,可以根据主副尺对旋转角度读数,并有螺旋测温头进行微调。图2为定心装置整体结构示意图。

图2 定心装置整体结构示意图
2.2 定心夹紧机构的结构
2.2.1 总体结构
如图3所示,定心夹紧装置分为相同的2组,方向互相垂直,形成十字形,满足4个夹紧压板分为2对相对于中心对称移动。2组在高度上分为2层,互不干扰,如图4所示。夹紧压板在直线光轴导轨上滑动,保证一对夹紧压板在同一直线上移动。中心连杆相对于中心销轴对称转动,关节轴承连杆具有相同的长度,保证一对夹紧压板相对于中心销轴对称移动。中心连杆和关节轴承连杆、关节轴承连杆和夹紧压板之间用关节轴承连接,使得连杆转动较为顺畅,不会卡住。如果采用普通轴承,则要求中心连杆及两边的关节轴承连杆完全在一个平面上,否则很容易卡住,这对加工精度及装配精度要求很高,相应成本也会增高。同时关节轴承也很容易安装。导轨上的滑块侧面有螺纹孔及内六角螺栓,夹紧压板夹紧机器人时,可拧紧内六角螺栓锁定位置。

图3 定心夹紧机构结构图
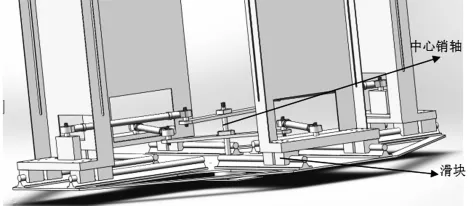
图4 定心夹紧机构侧面图
2.2.2 连杆机构的结构
如上所述,夹紧压板的对称移动是由连杆机构实现的。推动一个夹紧压板移动,与其对应的另一个夹紧压板会对称移动。连杆机构是实现功能的核心机构。
行程取决于中心连杆和关节轴承连杆的长度组合。滑台压板上的悬臂销与压紧面的距离为40 mm。设中心连杆长度为a(以两个悬臂销距离计算),关节轴承连杆长度为b(以两个悬臂销距离计算)。为了满足夹紧压板距离至少在300~900 mm之间。则a、b需满足以下关系:

解得a=300 mm,b=340 mm。即中心连杆长度为300 mm(以两个悬臂销距离计算),关节轴承连杆长度为340 mm(以两个悬臂销距离计算)。这时最大距离和最小距离均为中心连杆与两根关节轴承连杆在一条直线上的两个极限位置,分别为900 mm和300 mm。
3 定心装置的优化设计
定心装置设计最大的缺陷是太重,不利于人工操作,因此优化的核心是保证功能的基础上减少重量。重量最大的即顶板,顶板原来为厚度5 mm的铝合金板,质量为9.422 kg。因此顶板采用铝型材框架结构减重,如图5所示。框架结构为3060铝型材和3030铝型材组成。新的框架设计中,3060米铝型材重为1.59 kg/m,铝型材总长度为(1120+407.5×2)×2=3870 mm=3.87 m,重量为3.87×1.37=6.15 kg;3030铝型材米重为0.74 kg/m,总长度为185×5=925 mm,重量为0.925×0.74=0.6845 kg,框架总重6.15 kg+0.6845 kg=6.8345 kg,减重28%。
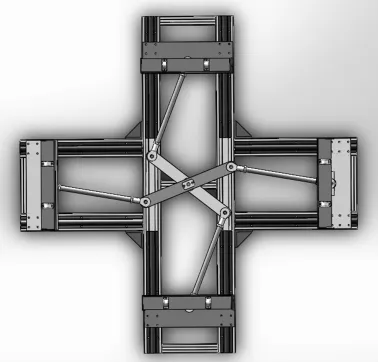
图5 铝型材框架式结构定心装置
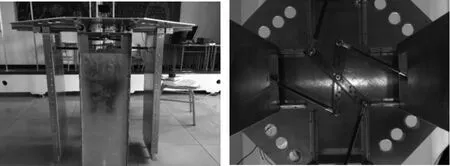
图6 定心装置实物
除了使用铝型材方式,还可以对顶板进行拓扑优化减重,但拓扑优化后的形状较为不规则,不易加工,成本大幅增高。铝型材框架式简便易行,成本低。
4 结 语
定心装置实物如图6所示,经过多次移动机器人定位测量实验,证明定心装置设计是成功的,能够实现对机器人在定心,作为移动机器人定位系统测试平台的一个组成部分,可以完成移动机器人定位测量。证明这种方式测量机器人的位置坐标是可行的。但还有操作不够方便、强度不够高等缺陷,且伸缩结构较为简单,对机器人高度的适应性不够广泛,这些都将有待于进一步改进。
[1] 王田苗,陶永,陈阳.服务机器人技术研究现状与发展趋势[J].中国科学:信息科学,2012,42(9):1049-1066.
[2] 李群明,熊蓉,褚健.室内自主移动机器人定位方法研究综述[J].机器人,2003,25(6):560-566.
[3] 余运昌,李绣峰,邓锦炽,等.自主移动服务现状与关键技术研究综述[J].机电产品开发与创新,2007,20(6):41-42.
[4] 禹建丽,张宗伟.自主移动服务机器人的研究现状浅析[J].中原工学院学报,2008,19(4):8-11.
