巡检与核应急机器人研究现状分析
2018-03-05汤怀量雷泽勇雷林刘卫沈智超程新泉
汤怀量, 雷泽勇, 雷林, 刘卫, 沈智超, 程新泉
(南华大学a.机械工程学院;b.环境保护与安全工程学院,湖南衡阳 421001)
0 引言
当前,对于核工业领域的安全问题包括两个方面:日常巡检和应急处理。正常情况下,对于铀转化车间、核电厂、核废料处理厂等场所需要人员携带射线测量仪、气溶胶取样器、空气检测仪等仪器不定时检测。在应急情况下,则需要对关键阀门开关、路障清除、泄漏的放射性物质进行处理等[1]。但核产业领域,由于设备本身和运行环境具有放射性,作业空间狭小,湿热[2]同时还兼具水下高温、高压的特点,人员巡检和应急操作存在辐射照射风险或操作受限等问题,而采用机器人巡检与应急处理,一方面可降低人员防辐射成本、受辐照剂量、工作强度,另一方面,可实现提前预警,及时控制事故源,减轻事故后果,为后续救援提供相关数据支持的功能。因此,对核设施内核辐射安全情况采用机器人监测是十分必要的。
1 巡检与核应急机器人主要研究内容
巡检与核应急机器人主要研究内容包括驱动机构、传感检测系统、运动控制系统、核防护[3]、执行机构等。
1.1 驱动机构
驱动机构是巡检与核应急机器人的重要部分,是传感检测系统、控制系统、动作执行机构的载体,同时决定了核应急机器人在非结构环境中的作业性能。不同的工作环境及要实现的功能不同,其行走机构也不同。目前研发的核环境机器人按应用环境可分为3类:陆上机器人、空中机器人、水下机器人。
应用于陆上的机器人多为轮式、履带式、多足式遥控机器人,如图1所示。
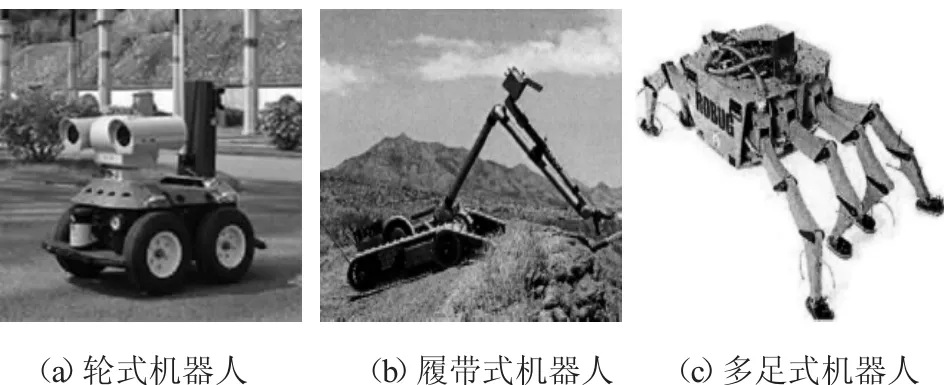
图1 陆上机器人
中国辐射防护研究院研制了一种六轮式辐射探测机器人[4],如图2所示,该机器人最大速度50 m/min,载重60 kg,最大爬坡25°,其中两只前轮可垂直摆动幅度达90°,运动机构简单且灵活,移动速度快,可爬一定高度的楼梯。较一般轮式机器人灵活,具有一定越障能力,但载重方面仍不及履带式结构。东南大学与南京军区某部共同研制了一款小型核化探测机器人[5]如图3所示,该机器人采用履带式结构,外加双前摇臂,配有机械手和探测仪器;可爬60°斜坡、40°楼梯,越过30 cm的障碍物,最大载重80 kg,相较轮式而言通过性强,承载能力大,但速度不及一般轮式结构。2011年日本东芝公司发布了一款四足机器人,名为“福岛探索者”,如图4所示。该款机器人被用于探索福岛1号核电站,“福岛探索者”高1 m,它的四足设计可以轻松通过崎岖的地形,其平均行走速度为1 km/h,越障能力突出,但多足式遥控机器人重心高稳定性较差[2]。用于空中辐射环境巡检大多采用无人机,无人机具有较短的着陆滑跑距离及较高的飞行稳定性。2014年俄罗斯为气象环境检测局研制了一款用于辐射环境监测的无人机系统,采用“超级卡姆”S-350(Supercam S-350)无人机平台,如图5所示。相关参数如下:升限为3600 m,速度为65~120 km/h,飞行环境为风速15 m/s,-30~+30 ℃,中雨和中雪,发射起飞方式为弹射。可实现对半径90 km以内的区域进行监测。该无人机系统监测范围大,能有效提供现场整体画面,但由于无人机结构、体积所限,不能携带更多的检测仪器,提供更多的现场数据。用于水下巡检的机器人多采用螺旋桨式结构,能够在水下活动自如。中广核集团阳江核电有限公司针对核电站取水口海生物检测采用了一款名为LBF-150型水下机器人[6],如图6所示。该水下机器人配有4个大功率无刷推进器驱动螺旋桨,前进速度3节以上,可潜至水下150 m,可实现自动悬浮、前进、后退、上升、下潜,运动灵活,能将水下实时景象传输至控制箱显示屏上。

图2 辐射探测机器人

图3 核化探测机器人
图4 “福岛探索者”核化探测机器人

图5 无人机监测机器人
1.2 传感检测系统
传感检测系统是巡检与核应急机器人实现检测任务的主要承担者,通常,机器人携带各种各样的传感器、仪器探头组成检测系统完成监测任务,比如CCD相机、辐射探测仪、氢气浓度探测仪、温湿度计、红外测距仪、红外探测仪[7]、气溶胶取样仪等,然后经过多传感器信息融合技术、数据处理技术实现机器人对核环境多信息采集、异常温度、异常气味、管道泄漏的检测。

图6 LBF-150型水下机器人
钱夔等[8]设计了一种嵌入式核探测仪,如图7所示,该探测仪用于监测X射线、γ射线,采用了计数前时间(count-to-time)测量技术,拓宽了计数管的测量范围,延长了使用寿命。但不具备检测多种射线的功能。中辐院研制的CAM-2型气溶胶连续监测仪,如图8所示,能同时给出空气中α、β放射性气溶胶的活度浓度,采用了能量甄别法和改进的α/β比值法,实现对空气中气溶胶值连续、自动测量,具有较高的灵敏度,同时避免了空气采样再送实验室分析这一常规方式所带来的延时性问题。目前尚无相关文献介绍将该仪器集成至巡检机器人上,但该仪器在中核404厂得到广泛应用,且效果良好。2003年东南大学与南京军区防化研究生共同研制的一款小型核化探测机器人[5]如图9所示。该机器人配备4个摄像头、红外测距传感器、超声波测距传感器、核辐射探测仪,应用无线传送装置实现传感信息与远程控制台的通讯,可进入辐射高危区域进行辐射监测、现场景象传输、并执行应急任务。
图7 嵌入式核探测仪

图8 CAM-2型气溶胶连续监测仪

图9 东南大学核化探测机器人
1.3 控制系统
巡检与核应急机器人运动控制系一般采用上位机与下位机方式实现,下位机在机器人内,主要用于与上位机信息交互,控制机器人行动。上位机主要功能是在遥控端通过人机界面采集各种信号,并进行控制算法运算,再向下位机发送命令和接收采集的信息。由于核环境的特殊性,要求控制系统灵敏度高、稳定性好、可操作性强,其中运动控制系统涉及到机器人定位导航、自主避障等技术。目前常用的定位导航技术有利用传感器、GPS、RFID、SLAM环境三维立体化建模技术等[9]。而神经网络算法、遗传算法、模糊逻辑算法、混合算法等[10]技术多用于机器人智能避障研究。熊鹏文等[11]设计了一种核电站巡检与应急机器人的控制系统,系统分为通信传输级、控制级和装置级3级,并采用CAN总线将各模块连接起来,各层级之间实现模块化,实现系统松散耦合,提高了系统的层次性和可靠性。同时采用混合算法提出了二维运动控制机制,实现了对机器人运动的精准控制。吴玉等[12]为核电站环境监测机器人设计了一套控制系统,控制系统硬件逻辑图如图10所示。该机器人配有超声波传感器、航姿仪、视觉传感器,实现对前进、后退、爬楼梯等运动的控制,车体控制计算机采用RTD公司的PCI-104计算机,集成了CPU主板、CAN总线扩展卡等,各传感器采集的数据通过卡尔曼滤波算法[13]对数据进行处理,误差小,实现了对控制系统模块化设计并提高了控制精度。Jilek的团队[14]研发了具备完全自主性的Orpheus-X4辐射探测巡检机器人,可自主规划探测路径,通过RTK GNSS传感器实现精确定位,能对长90 m、宽15 m的室外矩形区域进行探测点均匀分布的覆盖式扫描,并构建辐射巡检云图。
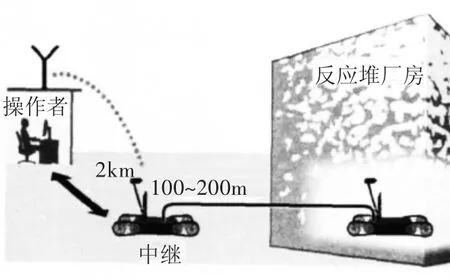
图11 Quince2机器人工作原理图

图12 Packbot机器人线缆卷轴器
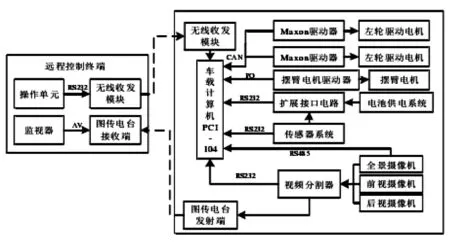
图10 控制系统硬件逻辑图
1.4 通信系统
当前,巡检与核应急机器人采用有线通信和无线通信两种方式。由于机器人和远程控制端存在大量图像数据和信息的传输,这就需要这两种方式的通信系统有足够的通信带宽和稳定性[15]。但这两种方式在强辐射环境下都存在弊端。有线通信方式在复杂的现场环境下容易引起通信线缆缠绕,制约了机器人的行动;而高辐射作业区其墙体多为大厚度混凝土结构,对无线通信信号有强屏蔽性,而无线通信的电磁波对核设备也有可能产生影响。目前针对解决这一问题有三种措施:线缆防缠绕设计、开发高频通信、增加通信中继。日本研发的Quince2机器人通过光纤连接和增加中继器控制距离可达2 km,如图11所示。该机器人在福岛核电事故中得到良好应用[16]。美国Packbot机器人[17]采用有线加无线混合式通信方式,在无线通信方式失效的情况下采用有线通信。其线缆卷轴器采用了防线缆缠绕设计,如图12所示。其次,该机器人可以根据实际情况配备4.9 GHz频段全向天线[18],增强信号穿透力,而目前我国核环境机器人通信通常在2.4 GHz以下。
1.5 核防护
应用于核环境的机器人与一般的工业机器人最大的区别在于前者需要核防护处理[19]。巡检与核应急机器人是机电一体化的系统,其携带的各种传感器、探头、集成电路易被带电粒子、高能射线损伤,导致机器人故障或报废。因此机器人核防护至关重要,目前核防护方法主要采用屏蔽加固防护、电路抗辐射加固、采用新型材料防护等方式。
1)屏蔽加固防护。方式一:在辐射源和关键部位之间放置:铅、铝、钨、硼-铝合金、混凝土、硅胶、聚乙烯等[20]屏蔽材料。图13所示为一种屏蔽带,采用钨/硅树脂,将该屏蔽带覆盖在上盖与机器人车体中间的空隙中,防射线效果明显。方式二:在传感器、探头、信号通信单元等敏感元件或部位涂覆抗辐射材料,如图14所示。实验证明通过抗辐射加固的半导体器件耐辐射能力可达10 kSv[21],但由于屏蔽材料密度较大,在机器人整体重量限制的情况下,所携带的屏蔽材料有限,故只能抵御部分辐射粒子冲击。
2)电路抗辐射加固。电路抗辐射加固方式有多种,其中一种方式为硬件冗余设计。是指在设计机器人硬件电路过程中,针对易被损坏的电路采用多通道冗余设计,当某一通道受到辐射粒子击坏后,其他通道能够代替击坏通道,确保硬件系统仍能正常工作。此种方式在不增加机器人重量的前提下提高了耐辐射能力,但在高辐射环境下,抗辐射能力仍不够。

图13 Packbot屏蔽带
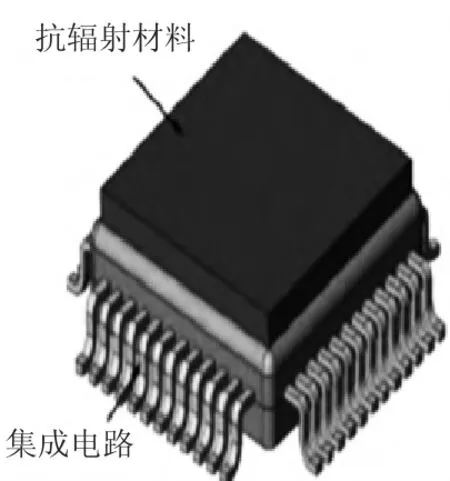
图14 屏蔽加固防护
3)采用新型材料防护。如机器人底盘常用到的橡胶,由于普通橡胶在接受一定辐射剂量后往往会失效,目前一种解决方式是:如尹强等[22]介绍的一种普通橡胶中加入稀土改性聚合物三元乙丙和氧化铋方式,抗辐射性能将大幅提高,但目前相关介绍较少,并未普及。姜懿峰等[23]采用蒙特卡罗MCNP程序完成了新型耐高温环氧树脂基中子屏蔽复合材料的制备,该材料对0~2 MeV范围内的中子射线有着较好屏蔽性能,但制备较大面积的材料时,板材将产生裂纹。
1.6 执行机构
巡检与核应急机器人在应急情况下需要执行对关键阀门开关、清除障碍物、管道堵漏等动作,这就需要机器人根据不同需求配置不同的执行机构。东南大学[12]设计了一款小型四自由度机器手臂,如图15所示。手臂前端手抓最大可抓取直径φ85 mm,最大抓取重量5 kg。该机器手臂为扩大适用性,前端手抓可替换成铲斗。但由于手臂自身结构和大小的原因,只适用于抓取或铲起重量较轻体积略小的物体。在清除大型障碍物方面,瑞典的Brokk机器人[24]性能较为先进,如图16所示为机器人本体及配套的多种执行机构,各种执行机构为液压驱动,效率高,针对性强,不仅用于核应急处理而且还在抢险救援、水泥、冶金行业得到广泛应用,但价格过于高昂,离普及还有一段距离。
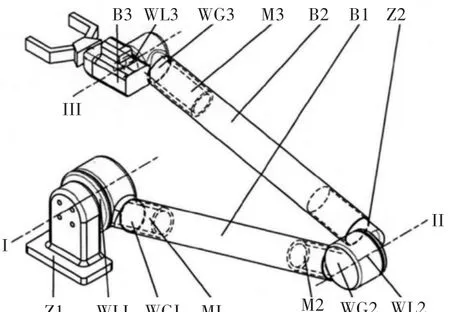
图15 机械手臂结构
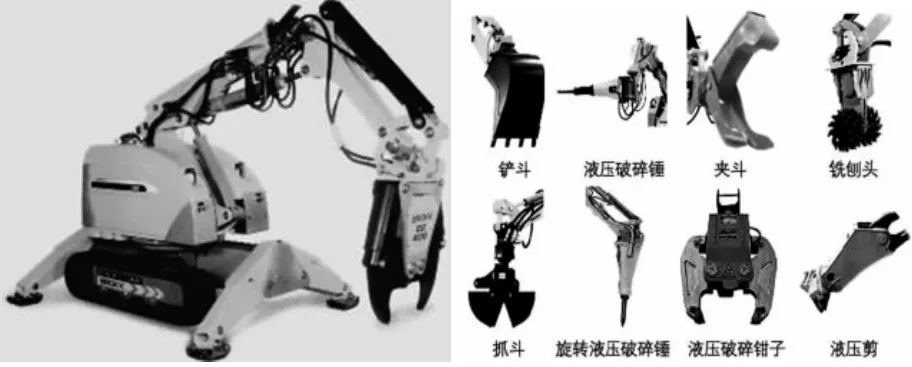
图16 Brokk机器人及多种执行机构
2 结语
总结了巡检与核应急机器人行走机构、传感检测系统、运动控制系统、核防护与执行机构等多项关键技术的研究进展,其中核防护是巡检与核应急机器人的特点也是重点之一,随着材料技术的发展用于机器人的核防护技术也将有重大进展。同时文中介绍了目前国内外研制的多款巡检与核应急机器人技术参数及应用情况,为研制同类机器人提供参考。
[1] 刘青松,张一心,向文元,等.核电站机器人技术应用现状及发展趋势[J].机器人技术与应用,2011(3):12-16.
[2] 杜树标,蒋韦韦,丁泮.核环境机器人现状及关键技术分析[J].兵器装备工程学报,2016(5):93-97,103.
[3] 杨秀清,骆敏舟,梅涛.核环境下的机器人研究现状与发展趋势[J].机器人技术与应用,2008(1):31-39.
[4] 沈华亚,朱万宁,董强敏,等.耐强辐射遥控探测机器人研制[J].核电子学与探测技术,2015(1):74-78.
[5] 崔建伟.东南大学研制成功小型核化探测与应急处理遥操作机器人[J].机器人技术与应用,2012(1):44-45.
[6] 成丰,柳宗晓.水下机器人在核电厂取水口海生物监测中的初步应用[J].机器人技术与应用,2016(4):27-30.
[7] 钱辉环.核环境下遥操作机器人的研究现状与关键技术[C]//中国自动化学会控制理论专业委员会、中国系统工程学会.第三十二届中国控制会议论文集(D卷).2013:6.
[8] 钱夔,宋爱国,熊鹏文,等.基于高斯模型的核探测机器人寻找核辐射源方法[J].高技术通讯,2013(3):282-288.
[9] 贾松敏,王可,郭兵,等.基于RGB-D相机的移动机器人三维SLAM[J].华中科技大学学报(自然科学版),2014(1):103-109.
[10]董晔.基于混合算法的机器人路径规划及编队研究[D].鞍山:辽宁科技大学,2016.
[11]熊鹏文.核电站巡检与应急处理机器人的关键技术研究[D].南京:东南大学,2015.
[12]吴玉,顾毅,董鹏飞.核电站环境监测履带式移动机器人设计与研究[J].机器人技术与应用,2016(3):41-45.
[13] 夏楠,邱天爽,李景春,等.一种卡尔曼滤波与粒子滤波相结合的非线性滤波算法[J].电子学报,2013(1):148-152.
[14]JILEK T,ZALUD L,KOCMANOVA P.Robotic Autonomous Outdoor Gamma Radiation Monitoring and Mapping[J].International Journal of Systems Applications,Engineering&Development,2016,10:162-168.
[15] 刘呈则,严智,邓景珊,等.核电站应急机器人研究现状与关键技术分析[J].核科学与工程,2013(1):97-105.
[16]NAGATANI K,KIRIBAYASHI S,OKADA Y,et al.Emegrency ResPonse to the Nuclear Accident at the Fuktshima Daiihci Nuclear Power Plants using Mobile Rescue Robots[J].Jounal of Field Robotics Jounral of Field Robotics.2O13,30(l):44-63.
[17]STEW M.Search and Resucue Robots Needed,But Market Has Yet to Develop[J].National Defense,2011(96):24-26
[18]iRobotCorporation.robotPackbotAccessories One Robot Unlimited Possibilities[EB/OL].[2015].http://www.irobot.com.
[19]赵慧,姚黎志,尚云龙.核环境下信息的采集与处理技术研究[J].电子制作,2013(13):122.
[20] 高晓菊,燕东明,曹剑武,等.核防护用中子吸收材料的研究现状[J].陶瓷,2016(11):15-22.
[21]郭永飞.遥感CCD相机的抗辐射策略研究[J].中国光学与应用光学,2010(6):534-545.
[22] 尹强,林蓉,李芳.辐射环境下探测机器人的方案设计及关键技术研究[J].轻工科技,2014(1):73-74,86.
[23]姜懿峰.核电救灾机器人中子屏蔽材料制备及辐射防护研究[D].上海:华东理工大学,2016.
[24] 蒋君.遥操作拆除机器人工作装置的设计与研究[D].绵阳:西南科技大学,2016.
