可穿戴式助残机械腿的结构设计与分析
2018-03-05方绿茵吴凯峰
孙 建 方绿茵 李 明 吴凯峰
(台州学院机械工程学院,浙江台州318000)
0 引言
社会日益进步,科技造福人民的呼声也越来越高,对于助残康复机械装置,国内外正在进行各层次的研究。据报道,美国仿生学实验室研发的一款助残机械外骨骼,截瘫患者可在它的帮助下独立活动4 h,行走速度可达1.1英里/h,售价为4万美元。虽然助残康复机械价格已有下降,但高端产品的价格对于普通残疾偏瘫患者来说依旧难以承担,而符合人们心理价位的助残机械,大多数功能不够完善,自由度与舒适度也得不到满足。鉴于此,我们在借鉴前人设计、吸取经验教训的基础上进行改善,设计了一款可穿戴式助残康复机械腿。
1 可穿戴式助残机械腿的结构设计
1.1 机械结构方案设计
可穿戴式助残机械腿应为患者提供身体支撑、预警保护、动力支持,在此基础上还应具备传感、反馈、控制等功能。根据正常人行走时的步态与力矩分析模拟,以及膝关节与髋关节的力矩分析,初步方案是利用普通拐杖进行身体支撑,在大腿处穿戴简易机械外骨骼,利用电机提供膝关节处的扭矩,利用韧带在保障舒适度的同时固定住髋关节与支撑拐杖的相对位置,而后利用大腿、拐杖、活动推杆组成连杆机构模拟大腿迈出与支撑拐杖回收的运动轨迹,如图1所示。
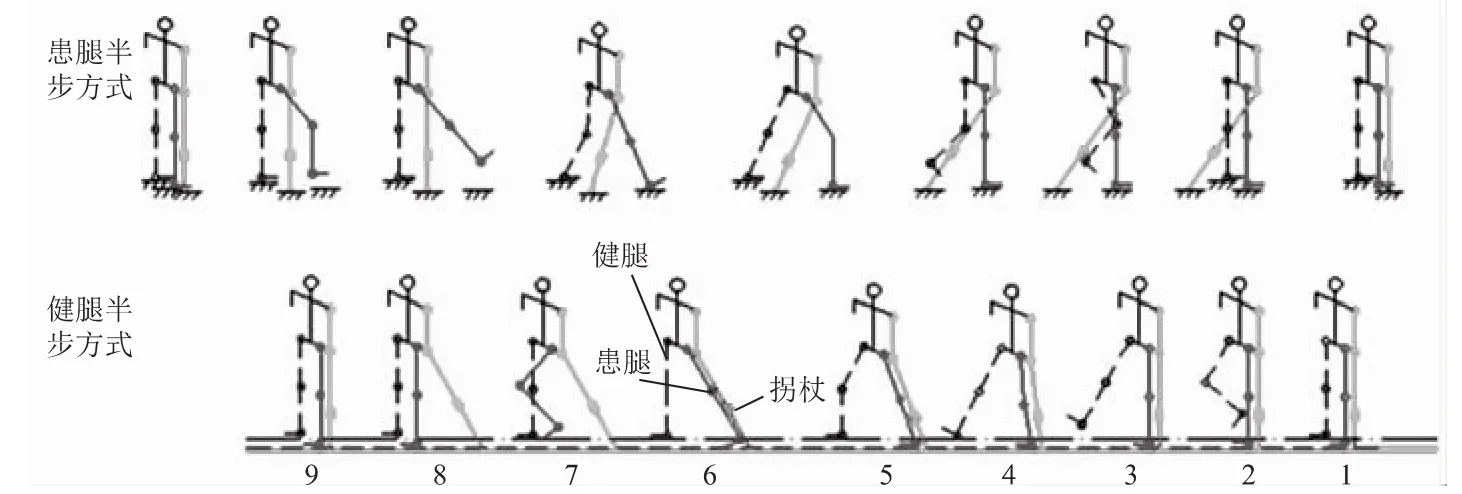
图1 大腿与支撑拐杖的运动轨迹
最终决定结构设计方案如下:
(1)在初步方案的基础上考虑拐杖及髋关节的联动,在拐杖处增加一个推杆,保证支撑拐杖在行进过程中满足角度尺寸变化要求;
(2)为满足增加助力要求,在底部用棘轮代替了一般支撑拐杖的底部滑块,在保障其自锁的同时,方便了支撑拐杖回收过程的实现;
(3)考虑患者的扭矩功率与自身负重能力,取消了膝关节处的电机,将动力源放在了支撑拐杖上,采用推杆电机,构建出一个四杆机构进行小腿部分的角度及力矩控制;
(4)为了满足行进过程中患者机械腿脚掌落地的稳定性,同时保证患者在使用该助残装置时与正常人行进步态的相似性,在踝关节与脚掌部分添加一个小推杆电机,控制脚掌与地面的角度,并添加防滑措施;
(5)在脚后跟处增加活动连杆保证自由度要求,并满足踝关节的舒适度。
1.2 机械腿各部分分析
1.2.1 支撑拐杖底部棘轮
为了实现用户行进时的便利性,并具备自锁的功能,在拐杖的底部加装一个可控的双向棘轮。一般情况下其可向前运动,向后自锁;在特殊情况下可改变自锁方向或转变为普通圆轮。棘轮构筑的三角形角度为37°&53°,使下三角重心略向后偏,对拐杖在行进过程中的位置不适起一定的保护作用,同时不会使重心过于偏后,导致棘轮寿命下降,甚至行进过程中发生用户倾倒的事故。
1.2.2 支撑拐杖伸缩装置
采用压力传感器与低速大扭矩推杆电机,自适应调节支撑拐杖长度,保证行进过程中对不同地形的自适应调节,保证行进过程的阻力较小,同时保证用户在使用拐杖时的舒适度,减少使用时带来的僵直感与不适感,保护用户重心稳定。
1.2.3 髋关节大腿活动连杆控制装置
利用支撑拐杖组成的活动四杆机构来提供髋关节的扭矩。经过仿真确定转动副数据,利用角度传感器控制大腿行进摆动角度,低速大扭矩推杆电机给予动力;根据每个用户不同的情况与不同的习惯,设置不同的参数,保证系统的稳定性、安全性和舒适度;同时,装置中与人体相对固定处可根据用户的实际情况进行误差补偿,减少了人体机械运动的疲劳。
1.2.4 膝关节小腿活动连杆控制装置
在膝关节处同样由支撑拐杖组成活动四杆机构,该机构与髋关节共用一个转动副,与髋关节联动。膝关节活动连杆装置的固定连接大多为松连接(小腿可自然垂下),即在小腿控制部分采用主重力辅电机的方式,减少了输出,又保证了舒适度。
1.2.5 踝关节脚掌活动连杆控制装置
踝关节处的活动连杆装置主要用途是保证在行进过程中舒适稳定的落地,采用三个ZLDS10X一维传感器,并排安装在一起,利用三个传感器检测该平面的距离,如果出现曲面则以前后两个传感器为基准,通过电机改变角度,并设置角度范围,保证与平面的稳定接触。
助残机械腿具体结构如图2所示。
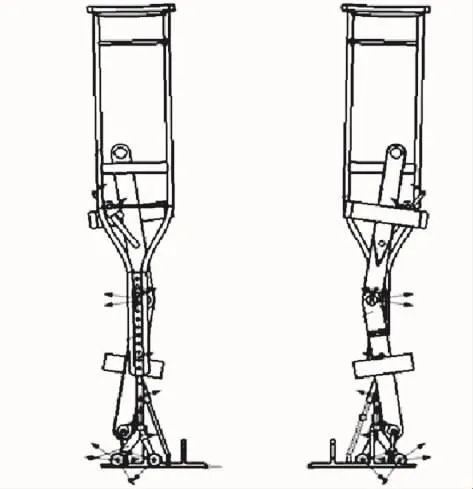
图2 助残机械腿结构
1.3 机械腿材料选择
考虑到轻便美观以及价格与适配性,选择铝合金作为助残康复机械腿的骨骼支架材料。铝合金质轻易加工,同时具备一定的经济性。
2 助残机械腿运动仿真数据对比与结果分析
2.1 行进过程中各部位能量消耗
在行进过程中,各关节能量消耗的仿真分析结果如图3所示。
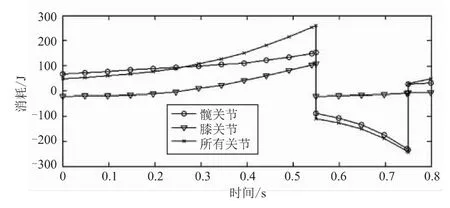
图3 各关节能量消耗图
由图3可知,各关节的消耗在行进过程中基本保持在较低水平,结合实际可知该机械腿可以正常工作。
2.2 行进时助残机械腿的关节轨迹分析
在行进过程中助残机械腿与健康腿各个关节路径角度变化对比如图4~图6所示。
分析图4~图6机械腿与健康腿各关节的仿真数据可知,健康腿的行走姿势与助残机械腿不尽相同,所有数据变化有时会出现先后顺序的波动,但在行进过程中起末位置即功能要求该助残机械腿已经达到,该机械腿的行走路径不会对人体产生不利影响,与人体的适应性较好,可达到实际的使用要求。
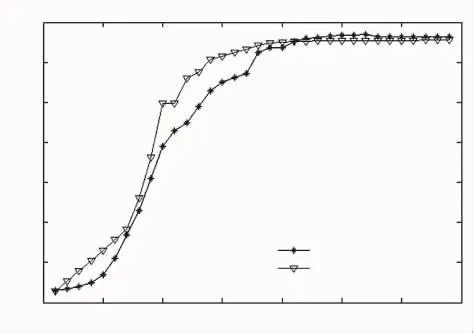
图4 踝关节路径对比图
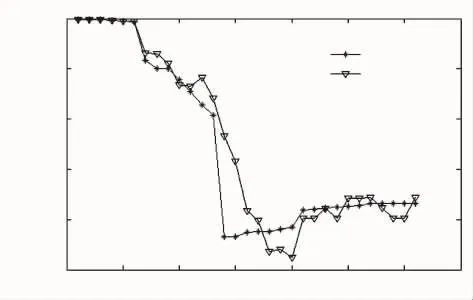
图5 髋关节路径对比图
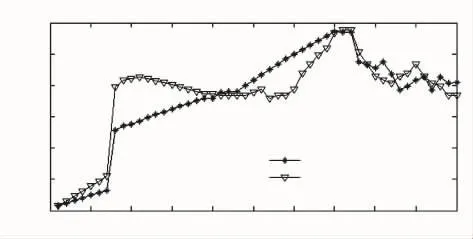
图6 膝关节路径对比图
3 样机试制
根据仿真数据的分析结果,试制了样机,并进行了行走试验,达到了预期的目标。
[1]吴海杰.偏瘫患者辅助行走下肢康复外骨骼系统开发研究[D].杭州:浙江大学,2014.
[2]周达岸,李建军.下肢外骨骼机器人的现状与展望[J].中国康复理论与实践,2013,19(12):1132-1134.
[3]肖阳,徐秀林,潘志超.坐姿下肢康复训练系统的结构设计与分析[J].北京生物医学工程,2017,36(3):237-244.
[4]史小华,任岭雪,廖梓宇,等.空间四自由度串并混联下肢康复机器人设计与分析[J].机械工程学报,2017,53(13):48-54.
