干扰影响固定鸭舵制动精度的仿真*
2018-03-02黄伟,高敏,王毅,方丹
黄 伟,高 敏,王 毅,方 丹
(陆军工程大学石家庄校区,石家庄 050003)
0 引言
通过固定鸭舵制动改变弹丸受力,能够对弹道横向和纵向两个方向进行修正[1],从而减小弹丸落点散布,改善射击精度。固定鸭舵的制动控制是实现弹道修正的关键。文献[2]对固定鸭舵制动器的执行工况进行了分析,从弹体转速和所需扭矩等影响执行机构工作带宽的因素分析,得到最佳起控点在弹道下降段。文献[3-4]针对固定鸭舵制动,分别设计了双闭环比例控制算法和模糊控制算法,实现了固定鸭舵制动控制。郝永平等[5]对轴承摩擦力矩对固定鸭舵制动控制的影响进行了研究,得出摩擦力矩会影响固定鸭舵制动有效时间的结论。由于弹丸飞行环境的复杂性,外界条件的变化和制动系统参数摄动都会对制动产生影响,但国内外关于各项干扰对制动控制的影响没有进行过系统性的研究。本文基于位置-速度双环PID控制算法,对影响固定鸭舵制动性能的导转力矩误差、制动生热、角速度测量误差以及角度测量误差等因素逐一进行分析,并通过仿真试验研究各干扰项对制动控制性能的影响。
1 双闭环PID制动控制算法
1.1 制动控制原理
弹丸出炮口后,固定鸭舵在空气导转力矩的驱动下相对弹体反旋,最终在空气导转力矩、摩擦力矩和极阻尼力矩作用下最终达到一个平衡转速。弹丸飞行过程中,弹载计算机根据弹道偏差解算固定鸭舵目标滚转角位置,地磁组件测量固定鸭舵实际滚转角位置、陀螺组件测量固定鸭舵滚转角速度信息。制动控制系统根据以上信息,按照一定的制动算法控制固定鸭舵停止在目标滚转角位置[6],从而对弹丸施加特定方向的气动力,改变弹丸受力完成弹道修正。
本文以永磁力矩电机作为固定鸭舵制动的执行机构。固定鸭舵制动系统主要由地磁组件、陀螺组件、制动控制器、可控负载及其驱动电路、磁力矩电机和固定鸭舵等组成,如图1所示。控制算法的作用是根据固定鸭舵实时的滚转角速度和角度信息,计算得到PWM占空比α,输出给永磁电机驱动电路,控制电机作动实现鸭舵制动。为了有效实现弹道修正,鸭舵制动的技术要求为调节时间不大于1 s,稳态误差不大于5°。
1.2 控制算法构成
本文的研究中,制动控制算法采用位置-速度双环PID控制算法。该算法对典型的永磁力矩电机三环伺服控制系统[6]进行了改进,出于弹载制动系统电流反馈和控制困难的考虑,去掉电流环;利用传统PID控制结构简单、易于实现的优点,设计位置环PID控制器和速度环PID控制器,最终得到的位置-速度双环PID控制系统结构框图如图2。
速度控制要求响应速度快,具备一定的抗干扰性能,故将速度环校正为典型的Ⅱ型系统;位置控制要求跟随性能好,稳态精度高,故将位置环校正为典型的Ⅰ型系统[7]。控制系统设计先进行速度环设计,再进行位置环设计,根据上述原则确定PID控制器的形式和参数。通过对速度环的传递函数分析,得到速度环控制器的形式PI控制,位置环控制器的形式为P控制。依据实际控制系统的结构参数,得到速度环控制器的比例、积分参数和位置环控制器的比例参数。
2 干扰对制动控制的影响分析
2.1 仿真模型
在前文对制动控制算法设计的基础上,建立固定鸭舵制动控制仿真模型,如图3所示。
图3中,控制器部分按照双环PID算法搭建,算法结构如图2所示,控制器输出PWM占空比值;磁力矩电机模块包括电机驱动模块和电机本体模块,驱动模块为PWM波驱动的三相Mosfet开关及三相可控负载,本体模块为电机的电磁关系,输出电磁力矩,如式(1)、式(2);固定鸭舵模块包括动力学方程和运动学方程,如式(3)、式(4)。
其中,T是α为1时磁力矩电磁输出的最大电磁力矩;ke为发电常数,n-为电机转速;Xd为三相绕组直轴同步电抗;R 为外接可控负载;J、Md、Mf为固定鸭舵转动惯量和所受空气导转力矩和摩擦力矩;α、ω、为固定鸭舵运动角加速度、角速度和角度,ω0、为运动状态初值。
2.2 影响制动的因素分析
影响固定鸭舵制动的因素有很多,本文结合固定鸭舵制动工况,分别就导转力矩误差、制动生热、角速度测量误差以及角度测量误差等对制动控制的影响进行仿真,并对算法的抗扰性能进行评价。
导转力矩误差的来源主要有两部分:一是由环境参数随机变化引起的随机误差,可由某均值和某方差表示的随机信号表示;二是实际飞行中气象条件变化,如阵风等突发性的变化引起导转力矩突变,可由某阶跃信号表示。因此,导转力矩误差带来的干扰可以写成如下形式:
其中,第1项为随机误差,第2项为阶跃误差。
固定鸭舵制动时,电机线圈和可控负载都会消耗功率产生热量,在修正组件有限且封闭的空间内,制动生热会导致组件内部温度升高,温升可由能量守恒原理估算。制动生热会带来以下问题:1)可控负载阻值变化,引起回路电流变化,进而使得电磁力矩变化;2)线圈的阻抗变化,引起回路电流变化,进而使得电磁力矩变化;3)温升引起永磁体磁势变化,改变转矩系数进而引起电磁力矩变化;4)温度升高对轴承润滑剂的影响等,最终导致摩擦力矩变化。在这些变化中,制动生热对摩擦力矩的影响机制复杂且相对前几项较小,可忽略不计;而1)~3)都会引起电磁力矩的变化,可以转化到温度对可控负载阻值的影响进行研究。制动生热引起的误差可表示为:
其中,ΔR为可控负载阻值变化量,kR为制动生热综合影响系数。
修正组件在实际飞行过程中,受地磁场复杂分布和修正组件复杂电磁环境的综合影响,角度测量和角速度测量都会存在一定的误差。在本文研究中,参考相关文献[8],取地磁测角误差范围为±5°,角速度测量误差范围为±0.1 r/s。表达式形式为:
3 仿真实验及结果分析
基于以上分析,进行仿真实验。按照控制变量的原则,对各项干扰对制动控制的影响进行对比分析。设定如下8组仿真实验条件,如表1所示。
设计第1组无干扰项实验和第8组综合误差干扰实验的目的,是为了与中间6组单项干扰仿真实验结果进行对比分析。为了研究方便,选定目标滚转角为180°,设定固定鸭舵初始转速为20 r/s,t=0 s执行固定鸭舵减旋制动,得到第1组无干扰条件下的仿真结果如图4所示。图中红线标出了180°目标滚转角,从图中可以看出,减旋及制动过程响应迅速,在不到0.5 s时间内已经达到制动全部指标要求,稳态误差极小,但伴有轻微抖振。
在第1组实验基础上,逐次改变仿真实验条件,完成第2~8组仿真,结果详列于表2中,表中以固定鸭舵制动角稳态均值作为平均偏差的参考,以
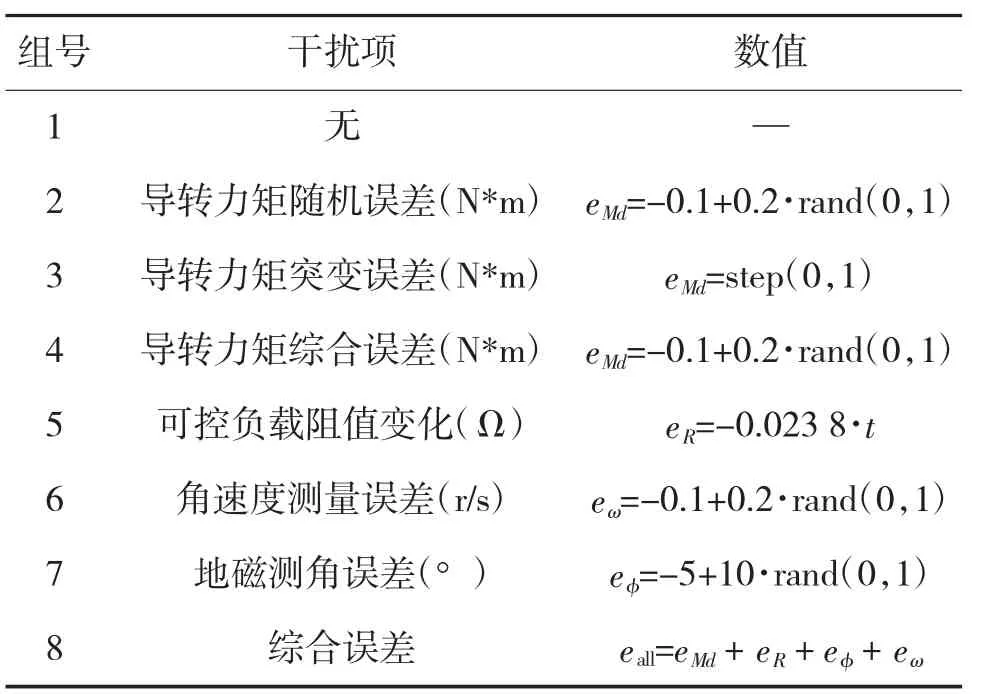
表1 仿真实验条件设置
方差和极大极小值描述制动的固定鸭舵抖振。

表2 仿真实验数据
分析仿真实验数据,可以总结出各种干扰对制动控制的影响如下:
1)分析第2组数据可知,导转力矩的随机误差对制动控制的精度会产生影响,但对均值偏差影响不大,主要是一定程度上加剧了固定鸭舵的抖振。分析其主要原因,是由于导转随机误差的存在,导致输出的占空比值与满足力矩平衡条件实际需求值之间存在偏差,导致固定鸭舵总是处于受力不平衡状态,抖振现象加剧。
2)分析第3组数据可知,阵风等引起的导转力矩突变误差,不会对固定鸭舵的制动产生较大的影响。分析其主要原因,是因为在本文采用的位置速度双闭环制动算法中,导转力矩作用点处于内环,而内环速度环校正后为典型的Ⅱ型系统,具备一定的抗干扰能力,能够有效抑制突变式干扰。
3)分析第1组至第4组仿真结果,可知导转力矩误差对固定鸭舵的制动控制有影响。且以导转力矩的随机误差影响为主,导转力矩的突变会导致固定鸭舵产生瞬时抖振,但没有产生大的超调量且迅速恢复平稳,不会对制动控制的精度产生较大的影响。但总体而言,导转力矩误差对制动控制的影响不大,文中采用的位置速度双环PID制动控制算法表现出良好的抑制导转力矩误差干扰的能力。
4)制动生热造成的干扰以可控负载阻值变化的形式添加到系统中。第5组仿真实验结果表明,可控负载阻值的变化会加剧固定鸭舵的抖振,且由于负载阻值的变化,使得产生相同大小的电磁力矩对应的PWM占空比值减小,这一点在数据上得到了验证。
5)角速度测量误差带来的干扰,对固定鸭舵制动稳态时的均值偏差几乎没有影响,但也会导致固定鸭舵的抖振现象加剧。分析其原因在于,角速度反馈仍然是位于速度环部分,得益于速度环响应迅速的特点,固定鸭舵的抖振幅度是有限的;同时由于速度环具备一定的抗干扰特性,故角速度测量误差不会造成稳态均值的显著变化。
6)第7组仿真实验结果表明,滚转角测量误差对制动的稳态均值没有明显的影响,但会引起固定鸭舵的剧烈抖振,这对有效实现弹道修正是非常不利的,其结果是会导致弹丸落点散布状况恶化,因此,必须采取一定的措施抑制这部分干扰对固定鸭舵制动产生的不利影响。
7)对比8组仿真实验结果,可知采用双闭环PID制动控制算法时,影响固定鸭舵制动的主要干扰因素是滚转角测量误差,且其造成的主要影响是固定鸭舵的剧烈抖振。
4 结论
固定鸭舵在飞行过程中会受到复杂干扰的影响,本文对各项干扰因素对固定鸭舵制动的影响进行了仿真研究。首先对双闭环PID制动控制算法进行了介绍,然后建立了制动控制系统的仿真模型,在对各干扰因素进行分析的基础上,分别就导转力矩随机误差、导转力矩突变误差、制动生热、角速度测量误差和角度测量误差对制动控制的影响逐一进行仿真研究。仿真结果表明,各项干扰对制动角的稳态均值影响不大,但会不同程度地加剧固定鸭舵的抖振。其中,滚转角测量误差会引起固定鸭舵的剧烈抖振。
前期蒙特卡洛模拟打靶实验证明:固定鸭舵的抖振引起的落点散布大于稳态均值偏差引起的落点散布。因此,对制动控制算法加以改进,以增强固定鸭舵在复杂干扰条件下制动的精度和稳定性,抑制固定鸭舵的大幅抖振,是控制算法优化急需解决的问题。
[1] GAGNON E,LAUZON M.Course correction fuze concept analysis for in-service 155 mm spin-stabilized gunnery projectiles[C]//AIAA Guidance,Navigation and Control Conference and Exhibit,Honolulu,Hawaii:AIAA,2008:1-20.
[2]程杰,于纪言,王晓鸣,等.隔转鸭舵式弹道修正弹电磁执行机构工况研究 [J].兵工学报 ,2014,35(12):2010-2015.
[3]高铭泽,施坤林,霍鹏飞,等.引信滚转角双闭环控制算法[J].探测与控制学报,2013,35(3):17-20.
[4]杨恺华,祁克玉,王芹.基于模糊控制的二维弹道修正引信滚转角控制算法[J].探测与控制学报,2015,37(2):19-23.
[5]郝永平,郭煜洋,张嘉易,等.轴承摩擦力矩对智能引信控制效率的影响 [J].弹箭与制导学报,2014,34(4):69-77.
[6]吴东苏,马佳,尹泉,等.永磁无刷直流电机伺服系统全数字化设计[J].兵工自动化,2002,21(4):6-8.
[7]袁海宵.永磁无刷直流电动机位置伺服系统的研究[D].南京:南京航空航天大学,2011.
[8]曹鹏,于纪言,王晓鸣,等.基于地磁与卫星组合的高旋弹丸滚转角高频测量及系统误差计算研究[J].兵工学报,2014,35(6):795-800.
[9]赵志涛,贾彦斌,赵志诚,等.永磁无刷直流电机调速系统的改进型 IMC-PI控制[J].火力与指挥控制,2016,41(9):70-73.