纯角度信息的舰载无人机目标运动分析算法
2018-03-02张渝缘石章松
张渝缘,刘 健,石章松
(海军工程大学,武汉 430033)
0 引言
舰载无人机(Unmanned Aerial Vehicle,UAV)系统作为无人飞行器与舰艇平台及其装备相结合的新事物,已成为一支功能日趋全面的作战力量,越来越受到各国军方的重视。相比于有人舰载机,舰载无人机具有轻便、灵活、更机动的特点,它的出现为海上作战提供了一种灵活、高效、低风险的战场感知和战斗应用平台[1]。通过舰载无人机,可实现对目标协同定位与跟踪,提高水面舰艇的远程感知能力。利用光电系统的目标运动分析处理系统,对舰载无人机光电系统测量的目标高低角、方位角,以及无人机自身平台的航向、速度、高度、机载GPS提供的经纬度等信息进行合理解算,实现对陆、海上目标的定位与跟踪。
基于角度信息的目标运动分析(BTMA)是指在不使用向外辐射能量的设备情况下,仅利用获取的目标角度信息对目标的运动状态参数(初始距离、速度、航向等)进行解算的过程。
本文提出了基于无人机观测目标的角度信息,构建目标运动分析模型,实现对目标快速有效定位,并求解相应的目标运动参数,结合具体的仿真算法,对目标运动进行仿真分析,验证了算法的有效性和可行性,为未来无人机目标定位研究提供参考。
1 基于角度信息的目标运动分析算法数学模型
在目标定位中,将无人机此时的坐标作为相对地理坐标系的原点,X轴指向东,Y轴指向北,Z轴垂直XY平面指向天顶[2-3]。
记 D1、Km、φm、Vm为目标初始距离、航向、俯冲角和速度,目标作匀速直线运动。无人机的航向为Kw、速度为 Vw、俯冲角为 φw。分别记 β1,β2,…βk;ε1,ε2,…εk为t1,t2,…tk时刻无人机测得的目标方位角和目标俯仰角。
(D1,Km,φm,Vm)能唯一确定目标的轨迹。所谓的目标定位,就是利用测量值(β1,β2,…,βk)和(ε1,ε2,…,εk)解出上述向量的过程。
根据相对运动的空间几何封闭性原理,从XYZ 3个方向分析,可以得到下面3个方程[4]:
对 j=0,1,…,k,εk,βk为已知量,利用式(2)可形成关于(Vmx,Vmy,Vmz,D1)的非线性方程组,如果能解出上述的4个参数,则可求出目标的初始距离、航向、俯冲角、速度,再根据无人机的航向和速度,便可以唯一地确定目标的运动轨迹。
2 可观测性分析
由式(2)知,方程组未知量为:Vwx,Vwy,Vwz,Dj,D1。可知该方程组不可解。为满足方程有唯一解的要求,采用构建 D1D2,D2D3两段方程[5]联立对目标求解。构成方程式如下:
未知量:Vwx,Vwy,Vwz,D1,D2,D3。此时方程组可有唯一解,写成矩阵形式得:
记式(4)的系数矩阵为F,讨论当无人机作匀速直线运动时的可观测性问题。
无人机速度在坐标系中3个分量Vwx,Vwy,Vwz为已知量,因其作匀速直线运动,有:,,,,由行列式性质易知:。
可以得出结论:当无人机作匀速直线运动时,目标运动状态是不可观测且不可解的。
下面讨论当无人机作匀加速直线运动时的可观测性。知:
经计算并化简得到:
3 算法原理
经过计算,将式(2)经过化简消去Dj,整理得到:
由于测量误差的存在,上式一般不严格满足,此时,可得下式:
经过k次观测,基于最小二乘估计原理,构建如下极小化目标函数:
为求得目标运动参数 Vmx、Vmy、Vmz和 D1,分别对其求偏导,并使:
对式(9)简化,令:
或
其中:
针对上面的算法分析,是在观测到的目标方位角 β1,β2,…,βk,俯冲角 ε1,ε2,…,εk未受到噪音污染的条件下进行的,解式(16)便可以求出Xk的最优解。假定目标方位、俯仰存在测量误差 δβj,δεj,j=0,1,…,k,求解目标参数 Xk,将 βj=βmj+δβj,εj=εmj+δεj带入到式(16),利用式(16)解出。符号 βmj,εmj代表目标方位、俯仰测量的精确值。记可得:
考虑到式(16)最小二乘估计若采用成批处理数据的方式,将导致算法的实时性差、所需存储空间大和计算复杂等缺点。此处选用递推最小二乘定位算法[6]进行解算。
解得:
利用矩阵反演公式化简得:
其中I为3阶单位矩阵,且由式(16)可知:
利用式(21)将式(22)化简得:
所以,利用上面推导得出的递推格式,便可唯一确定目标相对运动参数,根据求得的,可实现对目标航向km,俯冲角εm,速度Vm的运动参数的估计。同时根据初始距离,可求出对目标X,Y,Z方向实时距离 Dx,Dy,Dz,从而求出实时距离 D。即:
4 算法仿真及误差分析
4.1 对陆上目标的定位跟踪
假定无人机作匀加速直线运动,速度25 m/s,航向 80°,俯冲角 1°,加速度 0.07 m/s2,跟踪时长 300 s。目标作匀速直线运动,速度20 m/s,航向10°,目标俯冲角3°。无人机与目标初始距离为3 000 m,目标相对无人机初始方位角60°,俯仰角30°,角度测量误差均方差为0.05°。依据前述的解算方法进行40次仿真解算,求得目标相对无人机初距均值、初距相对误差、航向均值、航向绝对误差、俯冲角均值、俯冲角绝对误差、速度均值、速度相对误差曲线如图2~图9所示:
具体误差如下页表1所示。
由上图和表1可知,在测量误差为0.05°的情况下,观测300 s后,算法得到的参数结果与真实值较接近,初始距离和速度相对误差控制在5%以内,目标航向和目标俯冲角误差控制在2°以内,其精度可以接受。
4.2 对海上目标的定位跟踪
当对海上目标进行定位时,由式(3)可知,当无人机作匀速直线运动时,目标是可观测的。假定无人机作匀直线运动,速度 60 m/s,航向60°,俯冲角5°,跟踪时长40 s。目标作匀速直线运动,速度54m/s,航向30°。无人机与目标初始距离为4000m,目标相对无人机初始方位角30°,俯仰角30°,角度测量误差均方差为3°。依据前述的解算方法进行40次仿真解算,求得目标相对无人机初距均值、初距相对误差、航向均值、航向绝对误差、俯冲角均值、俯冲角绝对误差、速度均值、速度相对误差曲线如图10~图15所示:
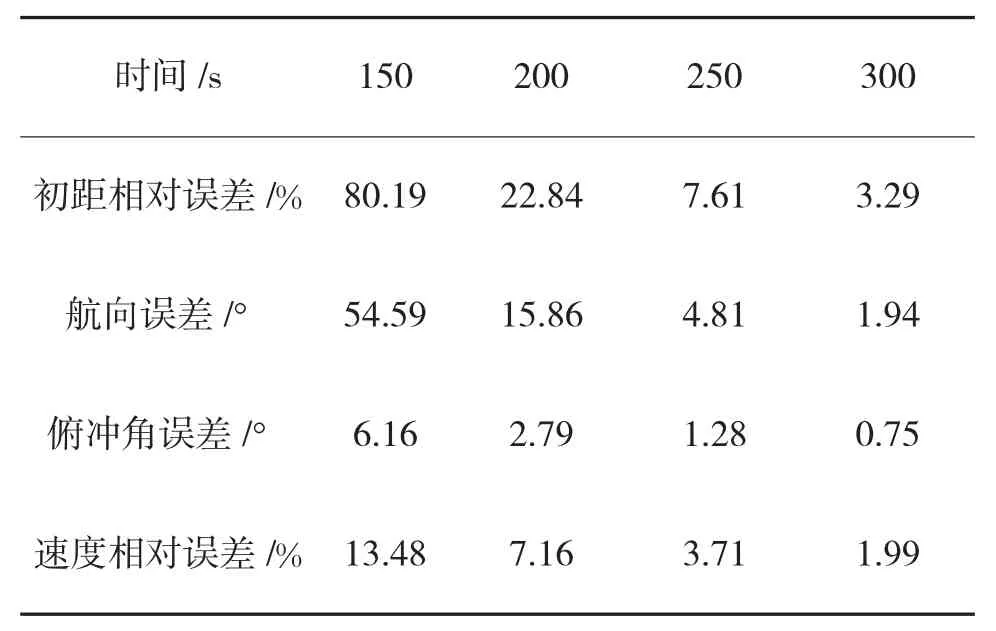
表1 误差统计表
不同测量误差条件下误差如表2所示。
由上图和表2可知,在测量误差为1°和3°的情况下,观测100 s后,算法得到的参数结果与真实值较接近,初始距离和速度相对误差控制在5%以内,目标航向误差控制在0.5°以内,当误差不断增大时,初始距离和速度误差明显升高。
通过此算法,可以对二维和三维空间目标进行跟踪定位。其计算精度较高,收敛速度较快,在实际中具有一定应用价值。

表2 误差统计表
5 结论
为通过舰载无人机对陆、海上目标定位跟踪,本文建立目标运动模型,并根据目标运动特性,构建等式,利用最小二乘法,对目标角度信息解算,求得目标初始距离、航向及速度,以便对其进行定位跟踪,并通过仿真验证,对计算信息进行误差分析。由于目标都是近距离直线运动,算法局限性较大,对远距离慢速机动目标的定位分析还有待深入研究。
[1]黄定超,樊兴,郭铭.舰载无人机系统技术研究[J].舰船电子工程,2008,167(5):32-36.
[2]李晨,韩崇昭.纯方位跟踪问题研究及算法性能[J].火力与指挥控制,2007,32(7):4-7.
[3]王航宇,卢发兴,刘健.大噪声背景下的纯方位导引方法[J].火力与指挥控制,2001,26(4):77-80.
[4]曲毅,刘忠,郭睿,等.基于光电观测信息的空中机动平台被动跟踪研究[J]. 系统工程与电子技术,2009,31(5):1093-1096.
[5]孙亮,于雷,王凯,等.机载三维纯方位无源定位的可观测性[J].空军工程大学学报,2008,9(4):1-5.
[6]莫成坤,陈树新,吴昊,等.基于角度信息的递推最小二乘无源定位算法 [J]. 计算机测量与控制,2014,22(9):2863-2866.
[7]贺若飞,李大健,刘宏娟,等.无人机自主控制应用需求及研究发展分析[J].火力与指挥控制,2016,41(5):1-5.
[8]丛红日,周海亮,陈邓安.舰载反潜直升机蛇形机动前方护航搜索方法及其仿真[J].兵器装备工程学报,2016(6):158-161.