基于触觉感知的家禽净膛机械手及其控制系统的设计
2018-03-01熊利荣罗舒豪
熊利荣,郑 伟,罗舒豪
0 引 言
近年来,中国的家禽养殖业得到迅猛的发展,综合生产能力显著增强,禽肉的消费量以每年5%~10%的速度持续增长[1-2]。自动净膛技术是家禽屠宰加工过程当中关键的技术之一,也是目前制约中国禽类屠宰加工行业向产业化、规模化方向发展的瓶颈问题。净膛作业主要分为自动联合作业和人工辅助流水线生产 2种作业方式[3-4],欧美等发达国家的大型家禽屠宰生产线基本采用自动联合作业装置。由于自动取内脏联合作业净膛设备引进成本比较高,中国只有少数企业引进该类装置,其他均采用人工辅助流水线生产作业,该模式存在许多弊端。利用人工进行净膛,基于人手极为灵活的特点,虽然净膛效果很好,但工作效率很低,工作量很大。净膛作业的工作环境也相对复杂,会对人的身体造成一定的伤害。另外人工生产环节可能由于工人的疏忽或错误操作,导致净膛作业时禽体或内脏受到污染,甚至导致疾病的传播,食品安全存在隐患。机器人智能化的不断发展,为自主研发性价比高的家禽自动净膛设备提供了契机,使家禽屠宰领域潜在的市场价值得到挖掘。
家禽的自动净膛技术是家禽屠宰加工过程中重要的技术手段,随着净膛机械手的发展,净膛方式也在不断更新[5-6]。根据取内脏方式的差异,可以分为扒取式、挖取式和夹取式 3种净膛机械手,是目前家禽屠宰加工行业运用最为广泛的几种取内脏的方式[7-10],由于净膛过程中夹取式净膛机械手对内脏破损较小的特点,故成为目前研究的主要方向之一。王猛[11]根据家禽腹腔轮廓曲线对夹取式机械手的结构和运动参数进行了设计,满足了净膛要求。王丽红[12]以扒取式取内脏方式开发了一套自动取内脏机,并得到了较好的净膛效果。
目前取内脏的方式主要是利用特定的机械结构之间的相互配合形成固定的运动轨迹来执行机械手的净膛动作,而且该设备对机械结构的设计和尺寸精度要求也比较高,同时这类掏膛方式对家禽肉质和内脏的破坏也较大。
基于国内掏膛机械手自动化程度相对低下、机械结构复杂单一且掏膛过程中内脏容易受破损的现状,在吸收和消化现有的净膛设备的优点上,充分利用现代计算机技术和传感器技术,设计一套在计算机控制系统下,根据内脏的位置和所能承受的压力大小,实时改变机械手抓紧力度的夹取式净膛机械手控制系统,实现净膛过程的自动化,以保证净膛效果,减少了内脏的破损。
1 机械手与控制系统硬件设计
1.1 机械手与控制系统整体结构
系统整体结构如图 1所示。该系统由机械手、可调节升降肉鸡固定装置、控制柜、试验台以及计算机组成。控制柜包括STM32单片机、步进电机驱动器、降压模块、压阻转换模块等电气元件。4根压阻式薄膜传感器安装在手指内侧、机械手爪与机械臂构成了净膛机械手。
上位机通过USB转串口向STM32单片机发送机械手控制指令,STM32单片机接受指令分析并处理数据,通过驱动器驱动步进电机执行净膛动作。系统运作过程中,单片机实时采集机械手爪上的压力,将得到的压力值与设定的内脏压力阈值比较,若压力大于设定值,机械手爪张开一定角度,若压力小于设定值,机械手爪执行系统设定的初始值,从而达到调节手爪压力的目的。
试验前对机械手进行初始化和参数设置,包括对机械臂 3轴各方向上位置的初始化,对机械手爪原始张开位置的初始化,以及对机械手爪闭合位置的参数设置。调试系统,调整好挂钩上肉鸡内脏的位置,确保机械手能够自动定点抓取到内脏。

图1 家禽净膛系统结构图Fig.1 Structure diagram of poultry evisceration system
1.2 机械手爪的设计
机械手爪整体为对称式结构,步进电机由电机固定架固定,电机轴通过联轴器与螺杆相连。螺杆和滑块之间为丝杠传动,滑块与机械手手指之间通过连杆连接,能把滑块的推力传递到手指上,控制机械手爪上步进电机的旋转方向和转速,就能分别控制手指的张角和抓取或松开速度。机械手爪结构示意图如图2a所示。
根据家禽腹腔造型,将手指的 3指节长度分别定为32、18、16 mm,相邻2指节的角度分别定为160°和150°。手指[13]由相对比较柔软的树脂材料加工而成,其他部分采用钢材料进行加工与装配。手指的具体参数如图2b所示。

图2 机械手爪结构及参数Fig.2 Structure and parameters of mechanical paw
1.3 机械臂的设计
按照机械臂的结构形式,将机械臂分为关节型机械臂和非关节型机械臂[14-15]。关节型机械臂一般是由移动副和转动副进行不同形式的组合而组成的,最常用的机械臂就是直角坐标型和开链连杆式关节型机械臂[16-18]。
考虑机械手爪先抓取内脏然后将内脏直接拉出的净膛动作和设计成本,本系统选择空间直角坐标系下的机械臂作为机械手的主体,机械臂的结构示意图如图3所示。

图3 机械臂结构示意图Fig.3 Schematic diagram of mechanical arm
该机械臂满足笛卡尔空间直角坐标系,它的运动是由X,Y,Z三轴方向上的直线运动组成,为满足内脏拉出的行程要求,将X,Y,Z各轴的有效行程分别为300、600和400 mm。通过丝杆传动,各臂分别沿着自身所在坐标轴方向上做前进、升降和伸缩运动。
1.4 主控芯片的选型
本控制系统选用 STM32ZET6型号的单片机作为主控芯片,该芯片是ARM公司的CortexM3内核的处理器。
1)该芯片内部时钟频率高达72 MHz,具有5个串口、1个USB接口以及3组共18路的12位模数转换器ADC(analog-to-digital converter)。利用内部的ADC能对外部电路中的电压等模拟量进行高精度采集,而且可以是多通道ADC同时采集,并将采集的数据通过串口发送给PC机。
2)具有2个基本定时器、4个通用定时器、2个高级定时器。高级定时器TIM1和TIM8可以同时产生7路的PWM输出。而通用定时器也能同时产生4路的PWM输出,STM32最多可以同时产生30路PWM输出,更利于对步进电机的控制[19-21]。
本机械手控制系统只需4路PWM输出控制4个步进电机,利用单片机自带ADC的4个通道进行压力采集,故该型号的单片机能满足实际控制要求。
1.5 触觉系统硬件设计与驱动电路搭建
1.5.1 压阻式薄膜传感器
本系统将4根安装在机械手爪手指内侧的RFP-6系列 601型号的压阻式薄膜传感器作为手爪的触觉感知部件。该传感器敏感区域直径为7 mm,量程为10 N。当传感器上压力变大时,电阻值变小。反之,当压力变小时,电阻值会变大。
实际中所用的4根传感器的电阻-压力的对应关系曲线如图 4所示,该关系曲线是在实验室通过标准的压力标定测试所得到的。

图4 压阻式薄膜传感器载荷-电阻的对应关系曲线Fig.4 Corresponding relation curve of load and resistance of piezoresistive film sensor
1.5.2 压力采集电路的搭建
压阻式薄膜压力传感器输出信号为电阻信号,转换模块的作用是将电阻信号转换为便于采集的模拟电压信号。将4根传感器分别与4个模块的传感器接口连接(不分正负极),即完成如图5所示的压力信号采集电路的搭建。

图5 压力信号采集电路示意图Fig.5 Diagram of pressure signal acquisition circuit
将转换模块VCC端供3.3 V电压,GND端接地,模拟电压输出AO端与对单片机进行ADC初始配置的对应通用输入输出GPIO(general purpose input output)口对接,就可以测定传感器力的变化所对应的电压值。
设压力传感器的阻值为 Rs,模拟电压输出口电压为Vout,则传感器的电阻值Rs为

根据上位机接收的电压值outV 可以得到Rs的值,通过压阻式薄膜传感器的压力与电阻的特性曲线即可得到对应的压力值。
1.5.3 步进电机与驱动器
步进电机是一种将脉冲信号转化为相应角位移的执行元件[22-24]。根据机械臂各轴及机械手爪的负载,选择相应的步进电机,具体参数如表1所示。

表1 步进电机主要参数Table 1 Main technical parameters of stepping motor
本系统采用 TB6600型号的驱动器来驱动步进电机工作,是一款专业的两相混合式步进电机驱动器,接口采用高速光耦隔离,具有抗高频干扰能力强等特点[25]。
1.5.4 步进电机驱动电路连接
本系统对步进电机和驱动器之间采用共阴极接法,为了保证机械手在安全的行程中运动,机械臂的X、Y、Z 轴方向上的两侧均安装有限位开关,开关的一端接在驱动器EN+的一端,另一端接在+5 V电源上。步进电机、STM32单片机、驱动器和电源的系统接线如图6所示。

图6 步进电机驱动电路示意图Fig.6 Schematic diagram of driver circuit of stepping motor
2 控制系统软件设计
控制系统软件主要包括掏膛机械手控制界面和基于keil5开发的控制程序 2大部分。其中控制程序又包括ADC压力采集程序和控制机械手运动的执行程序。
STM32单片机定时器产生占空比为50%的PWM信号,上位机通过串口向下位机发送不同数据,使能定时器的时钟控制对应步进电机,ADC实时采集手爪上的压力,最后达到机械手自动掏膛的目的。系统控制的流程图如图7所示。
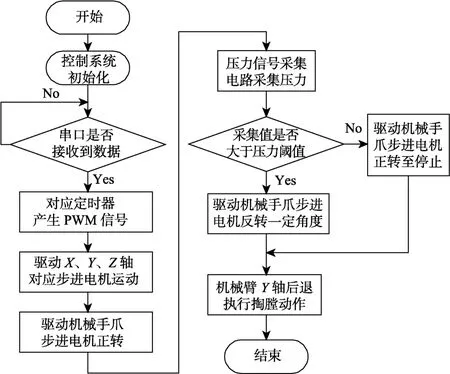
图7 自动控制模式流程图Fig.7 Flow chart of automatic control mode
2.1 STM32单片机PWM输出
STM32具有丰富的定时器资源,利用4个通用定时器分别产生4路PWM输出,每路PWM输出分别控制机械臂X、Y、Z轴方向和机械手爪的步进电机。为了产生PWM输出,必须对相应的定时器功能进行初始化配置,包括GPIO的初始化、定时器的初始化、定时器PWM输出通道的初始化和使能定时器等。
2.2 ADC压力采集实现
STM32ZET6单片机包含ADC1、ADC2和ADC3三个模拟数字转换器,每个转换器都包含十几个通道,可实现对多个模拟量同时进行采集。
本系统选择ADC1的通道0、通道2、通道4和通道5共 4个通道对电压模拟量进行采集,各通道所对应的GPIO 端口分别为 PA0、PA2、PA4和 PA5。首先利用Adc_Init()函数进行初始化,包括ADC1对应通道的GPIO初始化、设置ADC的工作模式、转换触发方式、设置数模转换的通道模式等。ADC初始化部分代码为:
ADC_InitStructure.ADC_Mode=ADC_Mode_Indepen dent;//ADC工作在独立模式
ADC_InitStructure.ADC_ScanConvMode=DISABLE;//模数转换工作在单通道模式
ADC_InitStructure.ADC_ContinuousConvMode=DIS ABLE;//模数转换工作在单次转换模式
ADC_InitStructure.ADC_ExternalTrigConv=ADC_Ext ernalTrigConv_None; //转换由软件而不是外部触发启动
ADC_InitStructure.ADC_DataAlign=ADC_DataAlign_Right; //ADC数据右对齐
ADC_InitStructure.ADC_NbrOfChannel = 1;//顺序进行规则转换的ADC通道的数目
ADC_Init(ADC1,&ADC_InitStructure);//初始化外设ADC1的寄存器
利用Get_Adc()函数设置ADC1的规则通道、采样时间等参数,最后利用Get_Adc_Average()函数对Get_Adc()获取的电压值取10次的平均值,保证数据的准确性。
2.3 人机交互界面设计
Qt Creator是一个跨平台的、完整的Qt集成开发环境(IDE)[26-28]。信号槽机制是 Qt的一个中心特征并且是Qt与其他工具包的最不相同的部分[29-30],本系统的人机交互界面就是基于其信号槽机制编写的,控制界面如图8所示。
该界面主要由串口、显示框、自动模式、手动模式和运行控制 5个部分组成。在操作掏膛机械手控制界面时,应通过串口数据线将PC机与STM32单片机进行连接,保证能搜索到相应的串口号,然后选择正确的串口序列号,点击“打开串口”按钮使上位机与下位机通信端口正常连接,点击“复位”按钮对系统进行初始化设置后,此时就可以对控制界面进行操作。
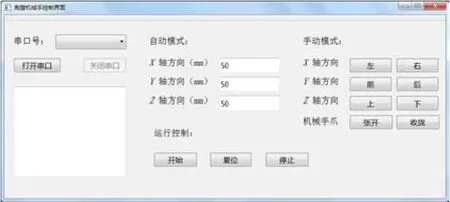
图8 控制系统人机交互界面Fig.8 Human-computer interactive interface of control system
通过上述的串口设置后,自动模式下,只需要在“Line edit”框中输入机械臂X、Y、Z轴各方向需要运动的距离,然后点击“开始”按钮就可以对机械手进行相应的控制。在手动模式下,只需要点击控制机械臂或是机械手爪的相应按钮,就可以实现对机械手的点动操作。
以 X轴方向的“左”按钮为例,该按钮的对象名为left_Button,当按压该按钮时,会执行void Main Window::on_left_Button_pressed()函数,当松开按钮时,执行 void MainWindow::on_left_released()函数,两种状态的执行代码如下:

3 系统测试及试验设计
3.1 压力阈值测定试验与净膛试验
3.1.1 试验材料
在农贸市场购买24只现场屠宰且经过脱毛、放血、割肛等工序的新鲜肉鸡,肉鸡的质量在1.3~1.7 kg之间,无断腿和断翅,健康状态良好。
3.1.2 试验方法
将肉鸡倒挂在挂钩上进行家禽自动取内脏试验。以12只肉鸡为一组,共进行2组试验。
1)确定内脏压力阈值Fave
每一次抓取内脏试验都使机械手爪从原始张开状态运动到机械手爪完全抓紧闭合,获取压力采集系统保存的机械手爪处于完全闭合时机械手爪上 4根传感器中的最大压力值。本试验以第1组肉鸡为对象,对12次试验中的压力值取平均值,并将平均值作为内脏临界压力值,即内脏压力阈值Fave。观察内脏的破损情况,计算内脏净膛率。
2)净膛试验
将内脏压力阈值Fave在程序中进行设定,当机械手爪的力大于临界压力值时,说明机械手爪对内脏的压力过大,单片机执行这一条件下的程序,控制机械手爪步进电机反转,使机械手爪张开一定角度,从而达到控制机械手爪抓力的目的。抓取过程中,若压力没达到临界值,机械手爪则完全闭合,保证内脏不至于脱落。本试验以第2组肉鸡为对象,观察内脏的破损、评价净膛效果。
3.2 测试指标
1)肉鸡内脏破损程度的评定
内脏的破损程度采用10分制进行评定。家禽内脏主要包括肝脏、心脏、肾脏、脾脏、以及一些消化道和肠道等[31]。为了评定内脏的破损情况,主要是对肝脏和心脏等易破损的器官进行评定,将肝脏和心脏的得分权重设置为50%和 30%,其他组织合计在一个对象中一起评定,并将得分权重设置为 20%。最后将肝脏、心脏和其他组织这 3项评定对象的总分作为肉鸡内脏破损程度的评定值,具体方法如表2所示。

表2 内脏破损情况的权重值Table 2 Weights of poultry entrails damage
2)肉鸡内脏净膛率的评定
内脏的净膛率主要用来表征机械手取内脏时的净膛程度,也是衡量机械手性能的一个重要指标。净膛率λ(%)

式中λ为净膛率,%;m为掏出内脏的质量,g;M为内脏的总质量,g。
4 结果与分析
4.1 内脏压力阈值测定结果
对第 1组肉鸡进行内脏压力阈值的确定试验,得到如表 3所示的结果。可以得到机械手爪上的平均抓力为7.7 N,内脏破损得分平均值为4.75分,净膛率平均值为87.9%。

表3 确定内脏压力阈值试验Table 3 Test of determining entrails pressure threshold
4.2 净膛试验结果
将内脏临界压力值设定为7.7 N,以第2组肉鸡为试验对象,进行一定临界值压力下的净膛试验,得到如表4所示的结果。从表中可以得到内脏破损得分平均值为 4分,净膛率平均值为87.4%。
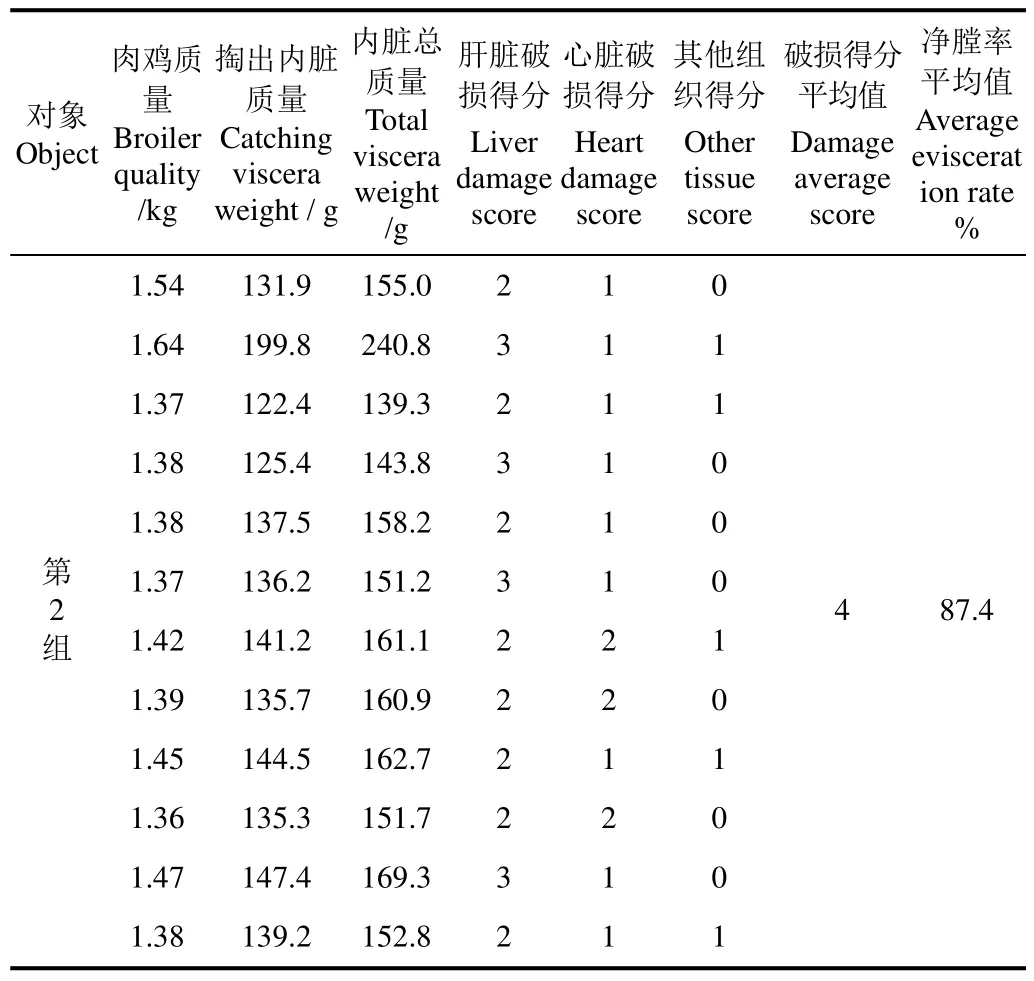
表4 内脏压力阈值自动控制模式下的净膛试验Table 4 Taking entrails test in pressure threshold and automatic control mode
4.3 试验结果分析
由表 3可知,质量相差较大的肉鸡,机械手爪上的力度也相差较大,一般质量大的机械手爪上的力度较大。内脏压力阈值Fave=7.7 N下,带触觉系统机械手净膛试验的内脏破损得分为4,且净膛率87.4%。不带触觉系统的机械手爪完全闭合抓取内脏时,内脏破损得分为 4.75,且净膛率为87.9%,可以得到带触觉系统的机械手爪对内脏的破损更小,但净膛率相差不大。
一般情况下,肉鸡的体型越大,内脏中的器官就越大。由于机械手爪完全闭合时的包络空间是一定的,在抓取体型较大的肉鸡内脏时,无疑会使机械手爪上的压力变大,在拉出内脏的过程中,就会导致内脏的一些部位单点受力较大,从而致使内脏的破损相对较大。而设定内脏压力阈值后,当手爪上的压力大于阈值时,机械手爪会张开一个设定的小角度,控制机械手爪上的力度,使压力不至于过大,掏内脏时,内脏会慢慢地在机械手指上有略微的滑动,起到了缓冲作用,分散了内脏上的集中应力,故内脏的破损相对会小些。
5 结 论
该系统以STM32单片机为核心控制器,以压阻式薄膜传感器作为机械手爪的触觉部分,以Qt软件编写的控制界面作为上位机,探索设计出了一套全自动化的净膛机械手。对净膛机械手的机械手爪进行了构思和设计,通过试验确定了内脏压力阈值,利用传感器实时采集净膛过程中机械手爪对内脏的压力并根据压力改变机械手爪的抓紧力度,达到减小内脏破损的目的。根据实际试验可知,具有触觉系统的机械手内脏破损得分为4,净膛率为87.4%,不带触觉系统的机械手爪完全闭合抓取内脏时,内脏破损得分为4.75,且净膛率为87.9%,可以得到带触觉系统的机械手爪对内脏的破损更小,但净膛率相差不大。且性能较为稳定,能很好地实现净膛动作,净膛效果基本可以满足家禽掏膛生产要求。
在后续的研究中,可以对机械手爪做进一步的优化或改进,以便更好地适应内脏的抓取动作,另外,可以在手爪安装多点压力传感器进行压力监测和采集,以提高压力采集精度。
[1] 张奎彪. 中国家禽屠宰加工技术及装备在十二五期间的发展目标[J]. 肉类工业,2011(3):8-11.
[2] 尹彦勋. 中国肉鸡产业的发展现状及趋势[C]. 全球肉鸡产业论坛暨第二届中国白羽肉鸡产业发展大会,2010.
[3] 叶金鹏,薛庆林,王子戡,等. 我国水禽屠宰加工关键技术装备及发展趋势[J]. 肉类工业,2005(12):1-4.Ye Jinpeng, Xue Qinglin, Wang Zikan, et al. Key technology and equipment of waterfowl slaughtering and processing in China and its development trend[J]. Meat industry, 2005(12):1-4. (in Chinese with English abstract)
[4] 马朋巍,王丽红,叶金鹏,等. 家禽自动取内脏技术及装备在我国的应用前景[J]. 农产品加工,2009(10):93-96.Ma Pengwei, Wang Lihong, Ye Jinpeng, et al. Poultry automatic visceral technology and equipment in China's application prospects[J]. Agricultural Products Processing, 2009(10): 93-96. (in Chinese with English abstract)
[5] 王猛,李阳阳,叶金鹏. 家禽自动掏膛机械手的发展和应用现状[J]. 农产品加工,2014(5):62-64.Wang Meng, Li Yangyang, Ye Jinpeng. Development and Application of Poultry Automatic Evisceration Manipulator[J]. Agricultural Products Processing, 2014(5): 62-64. (in Chinese with English abstract)
[6] 蒋俊强. 家禽自动开膛机械手结构及运动参数研究[D].北京:中国农业机械化科学研究院,2016.Jiang Junqiang. Research on Structure and Movement Parameters of Poultry Automatic Bellow[D]. Beijing:China Agricultural Mechanization Research Institute, 2016. (in Chinese with English abstract)
[7] Rudolf J Tieleman. Poultry eviscerating: US4435878[P].1984-03-13.
[8] Tieleman Edward Johannes. Device for eviscerating poultry:EP0432317Al[P]. 1991-06-91.
[9] Meyn, Cornelis. Apparatus for removing the entrails from the abdominal cavity of poultry: EP0538943Bl[P]. 1995- 01-11.
[10] Evert Kilkstra. Eviscerating device for poultry: US5713786[P].1998-02-03.
[11] 王猛. 夹取式家禽自动掏膛机械手结构和运动参数的研究[D]. 北京:中国农业机械化科学研究院,2014.Wang Meng. Study on Structure and Trajectory Parameter of the Grippable Automatic Evisceration Manipulator for Poultry [D]. Beijing: Chinese Academy of Agricultural Mechanization Science, 2014. (in Chinese with English abstract)
[12] 王丽红. 基于数字化设计的家禽取内脏机关键技术研究[D]. 北京:中国农业机械化科学研究院,2011.Wang Lihong. Research on Key Technology of Poultry Taking Visceral Machine Based on Digitized Design[D].Beijing:China Agricultural Mechanization Research Institute,2011. (in Chinese with English abstract)
[13] 章军. 六关节三指苹果抓取机械手的自适应柔性分析[J].农业工程学报,2010,26(1):140-144.Zhang Jun. Analysis of adaptive flexibility of three-finger manipulator with six-joint for grasping apple[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(1): 140-144. (in Chinese with English abstract)
[14] 李程程. 七自由度机械臂控制系统设计与研究[D]. 南京:东南大学,2016.Li Chengcheng. Seven Degrees of Freedom Arm Control System Design and Research[D]. Nanjing: Southeast University, 2016. (in Chinese with English abstract)
[15] 李江道. 空间机械臂机电一体化关节的设计与控制[D].上海:上海交通大学,2012.Li Jiangdao. Space Mechanical Arm Mechanical and Electrical Integration of The Joint Design and Control[D].Shanghai: Shanghai Jiao tong University, 2012. (in Chinese with English abstract)
[16] 刘牧歌. 五自由度搬运机械手关键技术研究[D]. 锦州:辽宁工业大学,2016.Liu Muge. Research on Key Technologies of Five-DOF Handling Manipulator [D]. Jinzhou: Liaoning University of Technology, 2016. (in Chinese with English abstract)
[17] 陈磊. 六自由度关节型喷涂机器人结构设计及分析[D].重庆:重庆大学,2015.Chen Lei. Structural Design and Analysis of a Six-DOF Joint Type Painting Robot[D]. Chongqing: Chongqing University,2015. (in Chinese with English abstract)
[18] 徐元昌. 工业机械手[M]. 北京:中国轻工业出版社,2001.[19] 周江. STM32单片机原理及硬件电路设计研究[J]. 数字技术与应用,2015(11):1.Zhou Jiang. STM32 Singlechip Principle and Hardware Design[J]. Digital Technology and Applications, 2015(11):1.(in Chinese with English abstract)
[20] 桑勇,李锋涛,代月帮,等. 面向伺服电机的 STM32单片机控制系统设计[J/OL]. 机电工程技术,2015,44(11):65-72.Sang Yong, Li Fengtao, Dai Yuebang, et al. Design of STM32 Microcontroller Control System for servo motor [J/OL].mechanical and electrical engineering technology, 2015 44(11): 65-72. (in Chinese with English abstract)
[21] 邱恒. 基于 STM32单片机的直流电机调速系统设计研究[J]. 电子世界,2016(7):156-158.Qiu Heng. Design and research of DC motor speed regulation system based on STM32 single chip microcomputer[J].electronic world, 2016(7): 156-158. (in Chinese with English abstract)
[22] 龚金成,谌建飞,赵丹,等. 步进电机远程控制方案的设计及实现[J]. 机电工程,2016(11):1398-1402.Gong Jincheng, Shen Jianfei, Zhao Dan, et al. Design and Realization of Stepping Motor Remote Control Scheme[J].Mechanical and Electrical Engineering Technology, 2016(11):1398-1402. (in Chinese with English abstract)
[23] 徐建国. 步进电机智能控制的设计与实现[J/OL]. 电子技术与软件工程,2016(22):139.Xu Jianguo. Design and realization of stepping motor intelligent control[J/OL]. Electronic Technology and Software Engineering, 2016 (22): 139. (in Chinese with English abstract)
[24] 户佩佩,朱振伟. 步进电机和伺服电机在十字滑台控制中的应用[J/OL]. 轻工科技,2016(3):53-54.Hu Peipei, Zhu Zhenwei. Application of stepping motor and servo motor in cross slide control[J/OL]. Light Industry Technology, 2016(3): 53-54. (in Chinese with English abstract)
[25] 高伟康. 基于 STM32的两相四线步进电机高精度驱动器设计[D]. 淮南:安徽理工大学,2017.Gao Weikang. Design of High Precision Driver for Two-Phase Four-Wire Stepper Motor Based on STM32[D].Huainan: Anhui University of Science and Technology, 2017.(in Chinese with English abstract)
[26] 付辉,温丝丝,苟芳,等. QT用户界面的设计与实现[J]. 中国新通信,2014(17):104.Fu Hui, Wen Sisi, Gou Fang, et al. Design and implementation of QT user interface[J]. China New Telecommunications,2014(17): 104. (in Chinese with English abstract)
[27] 张增虎,李博,郭锐. 嵌入式Linux平台下MPlayer图形用户界面的实现[J]. 电视技术,2014(5):74-76.Zhang Zenghu, Li Bo, Guo Rui. Realization of MPlayer graphical user interface in embedded Linux platform [J]. TV technology, 2014(5): 74-76. (in Chinese with English abstract)
[28] 方世烟,林东. 基于Qt的电纸书图形用户界面设计[J]. 计算机系统应用,2012(3):216-219.Fang Shiyan, Lin Dong. Qt - based electronic paper book graphical user interface design[J]. Computer system applications,2012(3): 216-219. (in Chinese with English abstract)
[29] 毕洁英. 基于Qt的嵌入式系统GUI的设计与实现[D]. 济南:山东师范大学,2016.Bi Jieying. Embedded System GUI Design and Implementation Based on Qt [D]. Jinan:Shandong Normal University, 2016. (in Chinese with English abstract)
[30] 谢学刚. 基于Qt5.0的机器人上位机系统的设计[D]. 哈尔滨:东北农业大学,2016.Xie Xuegang. The Robot PC System Design Based on Qt5.0[D]. Harbin: Northeast Agricultural University, 2016. (in Chinese with English abstract)
[31] 王丽红,阎楚良,叶金鹏,等. QNZ15型家禽自动取内脏机设计与试验[J]. 农业机械学报,2010,41(增刊 1):220-224.Wang Lihong, Yan Chuliang, Ye Jinpeng, et al. Design and experiment of poultry automatic taking entrails machine of QNZ15 model[J]. Transactions of the Chinese Society of Agricultural Machinery, 2010, 41(S1): 220-224. (in Chinese with English abstract)