旱地蔬菜钵苗自动移栽机栽植性能试验
2018-03-01王永维何焯亮武传宇俞高红唐燕海
王永维,何焯亮,王 俊※,武传宇,俞高红,唐燕海
0 引 言
采用育苗移栽的方式进行作物种植具有高产、稳产、对气候补偿和提高土地利用率等综合效益[1-6]。蔬菜移栽主要有温室(设施)内移栽和大田旱地移栽,温室(设施)内移栽主要是将高密度钵苗移植至低密度穴盘或较大的盆体中,实现定植,满足幼苗生长对光照和养分等的要求。
目前国外温室自动移栽设备已成熟,国内学者也开发了相应的装备[7-8]。蔬菜大田旱地移栽是将温室内培育的成苗移栽至大田实现定植。国外旱地移栽机研发较早,已成功开发了多款穴盘苗全自动移栽机,如意大利的Ferrari旱田全自动移栽机、法国Pearson公司的旱田全自动移栽机等[2],但这些机型均存在结构复杂、成本高等问题,多用于经济作物。目前,国内用于旱地移栽的机具主要是半自动移栽机[9],按植苗部件类型主要有钳夹式[10-11]、挠性圆盘式[12-13]、导苗管式[14-15]、吊杯式[16-18]、连杆式[19-20]等型式的半自动移栽机,栽植性能良好,能够移植多种钵苗,但需要人工喂苗,作业效率低,劳动强度和作业成本均较高。
为了实现钵体苗移栽作业自动化,国内学者在半自动移栽机的基础上开发了多种自动取苗部件,如顶出式[21]、顶出夹取式[22]、旋转式行星系夹取式[23-24]、指针钳夹式等型式的自动取苗机构[25-28],为方便实现穴盘进给、取苗与植苗动作协调控制,研发了电控取苗系统[29],这些自动取苗机构在实验室条件下实现了穴盘苗的自动送取,但也存在机构复杂、成本高、可靠性低等问题,特别是缺乏将自动取送苗机构与植苗机构优化组合形成满足生产要求的自动移栽机。随着农业产业化经营,蔬菜规模化种植的发展采用传统的手工作业以及半自动移栽机已不能满足当前生产要求,研发具有送苗、取苗、打穴、植苗、覆土等作业功能的全自动移栽机十分必要。为了实现蔬菜钵体苗移栽自动化作业,浙江大学与浙江理工大学联合研制了旱地蔬菜钵苗自动移栽机,本文以旱地蔬菜钵苗自动移栽机为作业对象,对其不同植苗频率时的栽植性能进行试验研究。
1 旱地蔬菜钵苗自动移栽机
1.1 整机结构
旱地蔬菜钵苗自动移栽机主要由机架、栽植器、送苗机构、取苗机构、动力传动系统等构成,如图1所示。该机为2行自动栽植机,行距:400 mm,株距:250~400 mm,可调;栽植频率:40~96株/min,漏栽率:≤5%,栽植合格率:≥92%。
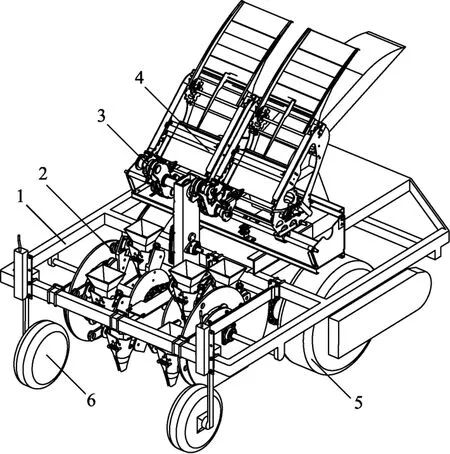
图1 旱地蔬菜钵苗自动移栽机总体结构Fig.1 Structure diagram of automatic vegetable pot seedling transplanter in dry field
送苗机构、取苗机构安装在机架上部,取苗机构为椭圆-不完全非圆齿轮行星系旋转式取苗机构,其组成与工作过程见文献[24-25]。送苗机构由传动机构、纵向送苗机构、横向送苗机构组成,纵向送苗机构通过棘爪对棘轮的控制实现纵向间歇送苗;横向送苗机构由凸轮式分割器和双螺旋轴组成,通过控制双螺旋轴做间歇转动并在双向螺旋轨导向作用下作横向和往复间歇运动[30];送苗机构载苗台可载128穴(标准穴盘,16穴×8排)软盘穴盘苗2盘,横向进给1次分别是将每盘穴盘苗的1株苗送至取苗机构的取苗点,横向间歇进给 8次完成 1排苗送苗,然后纵向进给1次将每盘穴盘苗的下1排穴盘苗(8株)移至取苗水平线,然后横向间歇进给送苗至取苗点,实现 128穴软盘穴盘苗横向、纵向间歇进给。送苗机构、取苗机构前后位置关系如图2所示。
栽植器为偏心圆盘吊杯式栽植器,由主轴、连杆、吊杯、偏心盘、轨道、转动盘和凸轮等组成,安装在取苗机构的下方,工作过程见文献[18]。调节取苗机构位置使其投苗位置D点与栽植器吊杯旋转上升过程相匹配,保证钵苗准确、适时地落入栽植器吊杯中,取苗机构与偏心圆盘吊杯式栽植器相对位置如图3所示。
2个取苗机构、2个偏心圆盘吊杯式栽植器沿整机纵向中心面左右对称布置,构成 2套取苗植苗系统,由 1套送苗机构供苗。整机前进与送苗、取苗和植苗的动力传动系统如图4所示,发动机动力5 kW,发动机动力经行走离合器传递至行走变速箱,再经行走变速箱传递至行走驱动轴及驱动轮;行走驱动轴上设有栽植离合器,栽植离合器接合时通过链传动将动力由行走驱动轴传递至栽植器主轴驱动栽植器工作,同时将栽植器主轴的动力通过链传动分别传递至取苗机构、送苗机构,驱动取苗机构旋转取苗,驱动送苗机构横向、纵向送苗。
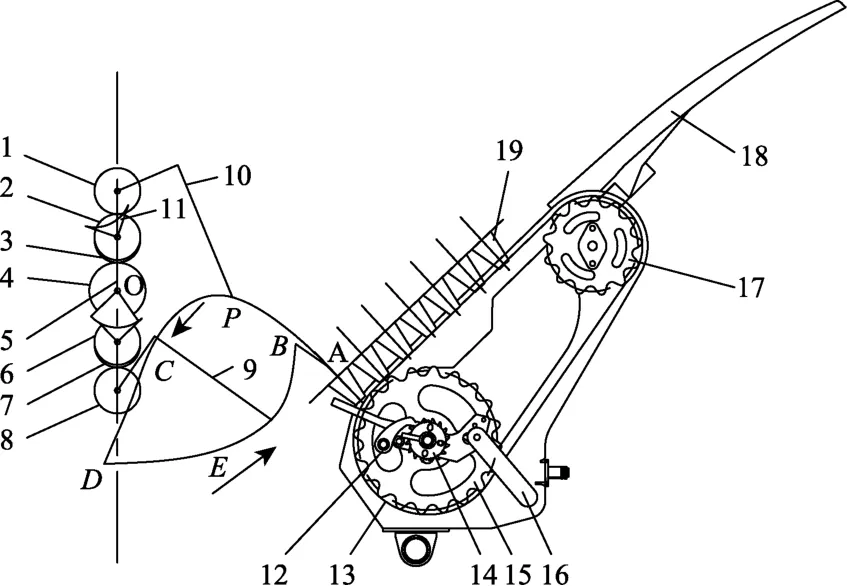
图2 送苗机构、取苗机构结构示意图Fig.2 Diagram of seedling sending and seedling picking-up mechanism

图3 吊杯式栽植器结构与取苗机构运动配合示意图Fig.3 Schematic diagram of exercise coordination of dibble-type apparatus and seedling picking-up mechanism
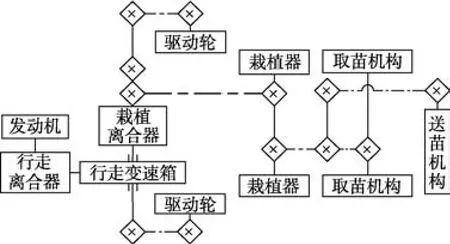
图4 动力传动系统简图Fig.4 Diagram of power transmission system
1.2 工作过程
启动发动机并将整机移动至作业垄上,将 2盘适龄的软盘蔬菜钵苗置于送苗机构的载苗台上,然后整机行走并使栽植作业离合器结合,动力由驱动轴传递至栽植器、送苗机构、取苗机构,取苗机构旋转并向穴盘取下1株钵体苗,送苗机构横向移动一个位置使下最前排的下1株苗对准取苗机构,栽植器旋转使吊杯上升。当取苗机构旋转至投苗位置时,栽植器吊杯转至投苗点下方,取苗机构将钵体苗投入吊杯,随着吊杯进一步旋转至栽植器下方时,吊杯在凸轮作用下自动打开并将钵体苗移入大田土壤,并由覆土轮进行覆土。取苗机构具有 2个取苗爪,旋转1周完成2次取苗、投苗,每次取苗、投苗1株,栽植器具有4个吊杯,旋转1次完成4株钵体苗移植;送苗机构每横向进给8次纵向进给1次,然后反向横向进给;依次往复实现自动移栽。
2 田间移栽试验方案
2.1 试验条件
试验在绿城现代农业开发有限公司(浙江省嵊州市甘霖镇)的蔬菜种植温室内进行,试验田地势平坦,无杂草残茬覆盖、无石块硬土,人工起垄,垄宽70 cm,垄高(9±2)cm,地块长度80 m。土壤为砂土,表层(深0~5 cm)含水率为11.7%,下层(深5~10 cm)含水率为 13.2%,符合机械行业标准《旱地栽植机械》JB/T 10291-2013对试验土壤的要求。试验用番茄品种为浙杂809,采用标准128穴钵苗盘培养,苗龄为35 d,钵体体积为25.2 cm3,平均苗高150 mm;因育苗时采用统一发芽然后将子叶期苗移入穴格的方式进行培育,故所有穴格均育有健壮的幼苗,空穴率为0。
2.2 试验方法
为了获得旱地蔬菜钵苗自动移栽机不同栽植频率时的作业性能,依据行走变速箱Ⅰ档与Ⅱ档的传动比、驱动轴上主动链轮与栽植器主轴上从动链轮的传动比、设定植苗频率计算行走变速箱输入皮带轮所需要的转速;然后整机空载沿试验垄行走,利用光电数字转速计HDT8003(量程:10~1 000 0 r/min,精度:±0.04%,分辨率为 0.01)测定行走变速箱输入皮带轮的转速,同时调节发动机油门使皮带轮转速达到设定值,然后使用数码相机拍摄此时栽植器工作,通过视频时间与栽植器植苗次数验证设定的栽苗频率并进行调节;最后在设定的皮带轮转速条件下进行该栽植频率时的移栽性能试验。
在进行每一栽植频率试验时,同时采用秒表测定移栽整盘秧苗(128株)所用的时间,使用数码相机记录并再次验证。试验设45、60、75、84和96株/min共5个栽植频率,每个栽植频率下试验3次,每次单行移植128株,除去初栽植的 8株,按照机械行业标准 JB/T 10291-2013《旱地栽植机械》连续检测后面120株,统计漏栽、重栽、倒伏、露苗、埋苗、伤苗的株数,测定株距、栽植深度,并计算株距变异系数、漏栽率、栽植深度合格率、栽植合格率等主要性能指标。因番茄种植农艺要求钵苗定植株距为200~400 mm,故试验时株距均设定为300 mm[18]。参照农业行业标准NY/T 1924-2010《油菜移栽机质量评价技术规范》测定直立度合格率。
1)栽植频率
栽植频率为单位时间内在一个栽植行内栽植到地里的全部秧苗株数z与时间t(s)之比,试验测定移栽整盘共128株秧苗时间,并按式(1)计算栽植频率[31]。

式中f为株距变异系数。
2)株距变异系数
测量栽植行内相邻 2株秧苗与地面的交点在栽植行中心线上的投影距离X1,比较实测株距X1与设计株距Xr(调整株距)之间的差异,判断实测株距X1是否合格,规定:相邻2株的实测株距X1在0.5Xr<X1≤1.5Xr范围内,为合格株距。株距变异系数CVX按式(2)计算[31]。

式中SX为株距标准差,cm;X为株距平均值,cm。
3)漏栽率
理论上应当栽植秧苗的地方而实际上没有称为漏栽。设行内相邻 2株秧苗与地面的交点在栽植行中心线上的投影距离 X1,实际测量时,X1在 1.5Xr<X1≤2.5Xr范围内,漏栽1株;X1在2.5Xr<X1≤3.5Xr范围内,漏栽2株,以此类推。评价漏栽程度的指标为漏栽率M[31]。

式中NLZ为漏栽株数;N'为测定段内的设计株数。
4)栽植深度合格率
测量从秧苗与覆土表面交点到秧苗根部的垂直距,此距离称为栽植深度。定义栽植深度大于幼苗钵体高度1.5倍或小于钵体高度80%为不合格,栽植深度大于1.5倍幼苗钵体高度定义为埋苗,小于钵体高度 80%定义为露苗。栽植深度合格率H1按式(4)计算[31]。

式中Nh为栽植深度合格的总株数;N为测定段内的栽植株数。
5)直立度合格率
秧苗主茎与地面夹角大于30°即为合格,否则判定为倒伏[31],并在不考虑漏苗、埋苗、伤苗的情况,计算直立度合格的植株数占总栽植株数的比例。根据番茄钵苗移栽农艺要求,规定钵苗主茎与地面的夹角大于 55°为合格[18],试验采用万能角度尺测量移栽后番茄钵苗主茎与地面的夹角,并用式(5)计算直立度合格率H2,NDF为倒伏株数。

6)栽植合格率
栽植合格率Q为移栽后合格株数占测定段的设计株数的百分比,按式(6)计算[31]。

式中NCZ为重栽株数;NMM为埋苗株数;NLM为露苗株数;NSM为伤苗株数。
3 试验结果与分析
田间移栽性能试验于2016年7月22-23日在绿城现代农业开发有限公司进行,试验现场与移栽效果如图 5所示。
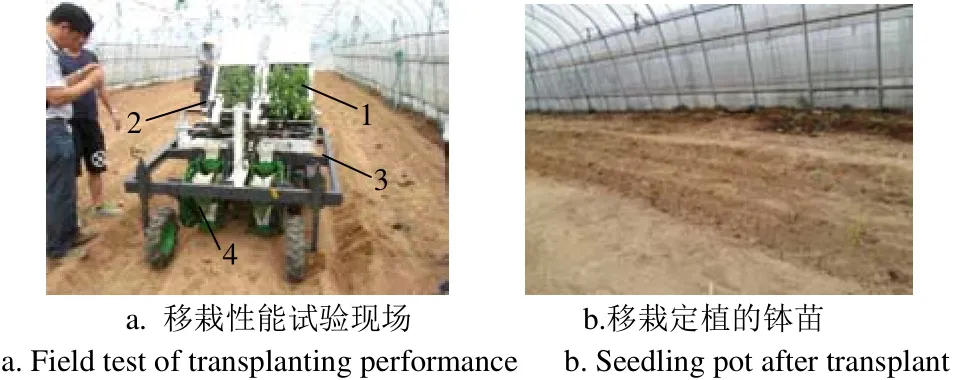
图5 试验现场与移栽效果Fig.5 Field test and transplanting performance
3.1 不同栽植频率时株距变化试验结果
株距变异系数是栽植均匀度的评价指标。如表 1所示,在低速移栽(栽植频率45、60、75、84株/min)时,随栽植频率增加,株距变异系数增加,其平均值范围为6.6%~7.1%,均远小于行业标准规定的 15%,栽植稳定性均较好;当栽植频率为96株/min,达到高速移栽的植苗频率时,株距变异系数的平均值迅速增加至8.9%,但仍小于机械行业标准JB/T 10291-2013《旱地栽植机械》的规定值。可见,该机栽植后入土钵苗植株的株距离散程度较小,栽植株距稳定。
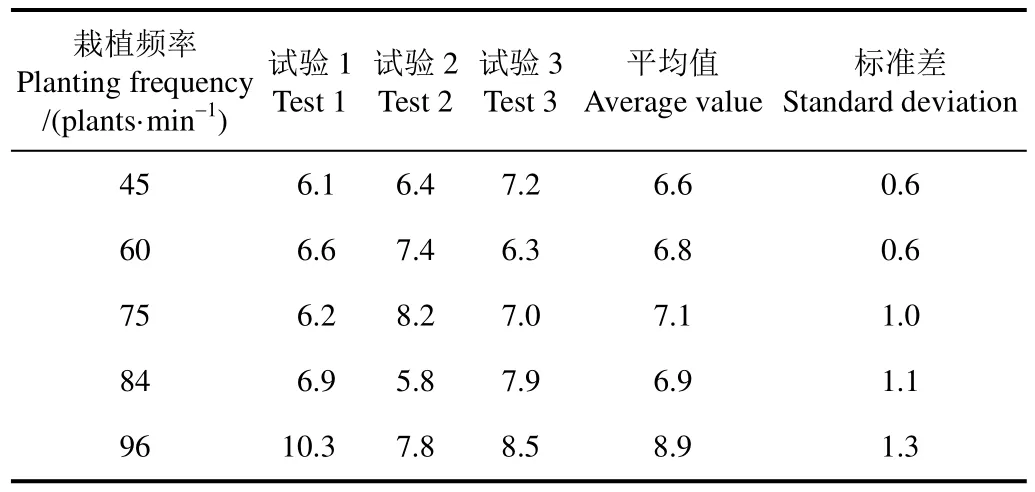
表1 不同栽植频率下的株距变异系数Table 1 Coefficient of variation of planting spacing in different planting frequency %
3.2 不同栽植频率时的漏栽率
漏栽率是移栽机械自动取苗性能、植苗性能以及二者动作协调性的综合性评价指标之一。由表 2知,旱地蔬菜钵苗自动钵苗移栽机漏栽率随栽植频率的变化没有明显规律,在低速(45、60、75、84株/min)进行自动移栽时,漏栽率均值范围为1.7%~2.2%,此时送苗机构、取苗机构、栽植器的配合协调,投苗、栽苗成功率最高,稳定性好;当高速移栽(96株/min)时,漏栽率迅速上升至2.8%左右,观察试验过程知,这主要是由于高速移栽条件下送苗装置横向、纵向移苗速度较快,高速取苗成功率略下降,从而导致漏苗率增加。试验表明,栽植频率在45~96株/min时,旱地蔬菜钵苗自动钵苗移栽机的漏栽率均符合机械行业标准JB/T 10291-2013《旱地栽植机械》所规定的漏栽率低于5%的要求。
3.3 不同栽植频率时栽植深度合格率
栽植深度合格率是影响秧苗移栽后缓苗和根系再生、长势整齐的主要指标。试验确定番茄苗的栽植深度为45 mm即番茄苗钵体高度,并按上述标准判定是否合格。由表3可知,在栽植频率为45~96株/min的区间内,栽植深度合格率随着栽植频率的增加略有下降,但栽植深度合格率均高于 97%,符合机械行业标准 JB/T 10291-2013《旱地栽植机械》要求。栽植深度合格率较高主要是由于移栽床土高度一致,移植田地条件良好。可见,栽植器、覆土轮的工作性能良好,栽苗深度一致,能够为定植后生长创造良好的条件。

表2 不同栽植频率下的漏栽率Table 2 Missed hill rate in different planting frequency %

表3 不同栽植频率下的栽植深度合格率Table 3 Qualified rate of planting depth in different planting frequency %
3.4 不同栽植频率时直立度合格率
直立度指秧苗栽植后直立状态的评价指标,参考农业行业标准NY/T 1924-2010《油菜移栽机质量评价技术规范》,要求直立度合格率达到85%。由表4可知,在栽植频率为45~96株/min范围内,随着栽植频率的增加,直立度合格率先略增加,栽植频率75株/min时直立度合格率最高,达到97.8%,然后随着栽植频率的增加略有下降,但均大于96%,符合农业行业标准NY/T 1924-2010的要求。可见,番茄钵体苗移栽后整齐、直立,可为其生长、发育奠定基础。
3.5 不同栽植频率时栽植合格率
栽植合格率是旱地蔬菜钵苗自动移栽机取苗、送苗和植苗协调配合的综合性指标之一,能够较全面地反映秧苗移栽后的成功率、作业质量。由表 5可知,随着栽植频率的增加,栽植合格率略有下降,移栽频率由45增加至 96株/min时,栽植合格率由 94.7%递减下降至91.1%,下降的主要原因是高速移栽时取苗成功率略有下降。可见,旱地蔬菜钵苗自动移栽机中在低速移栽、高速移栽时,栽植合格率均达到行业标准《旱地栽植机械》(JB/T 10291-2013)中栽植合格率大于90%的要求。
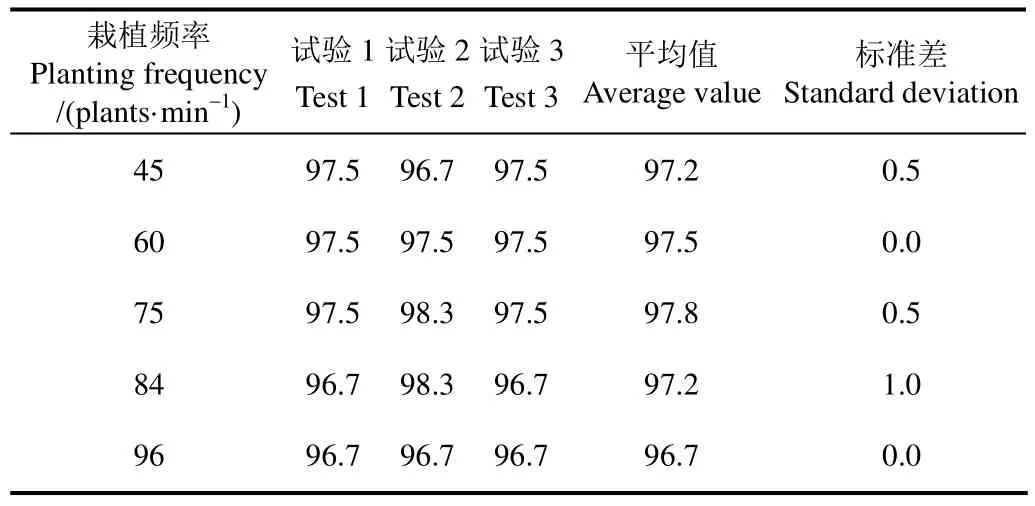
表4 不同栽植频率下的直立度合格率Table 4 Seedling-standing ratio in different planting frequency%
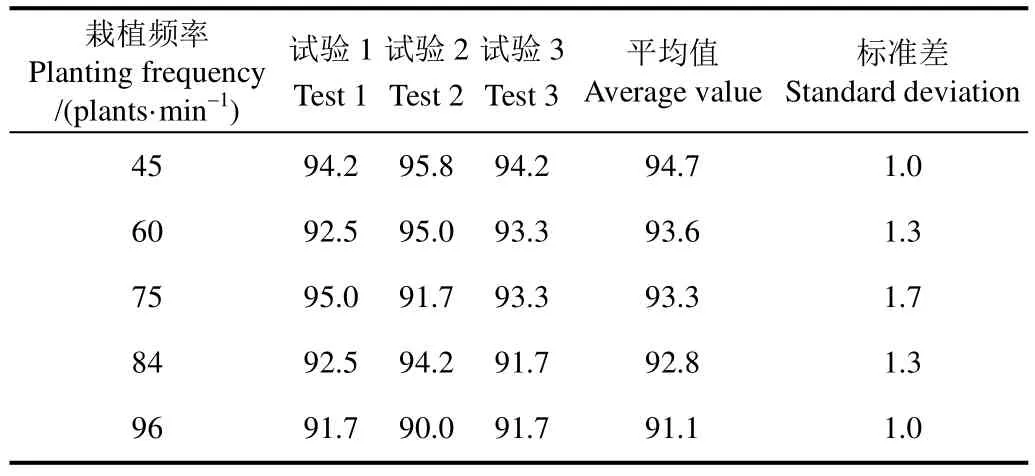
表5 不同栽植频率下的栽植合格率Table 5 Qualified rate of planting in different planting frequency%
4 结 论
1)以椭圆-不完全非圆齿轮行星系旋转式取苗机构、横向纵向间歇送苗机构、偏心圆盘吊杯式栽植器、动力传递系统为关键部件的旱地蔬菜钵苗自动移栽机,各机构工作配合协调,能够一次完成送苗、取苗、植苗、覆土等蔬菜钵体苗移栽工序,实现了钵体苗移栽自动作业。
2)旱地蔬菜钵苗自动移栽机在栽植频率为45、60、75、84株/min的低速移栽和栽植频率为96株/min的高速移栽时,作业性能指标株距变异系数、漏栽率随栽植频率增加而增大,其平均值分别为 6.6%~8.9%、1.7%~2.8%,栽植深度合格率、栽植合格率随栽植频率增加略有下降,其值分别为97.5%~98.9%、91.1%~94.7%;在栽植频率为45~96株/min范围内,株距变异系数、漏栽率、栽植深度合格率、栽植合格率均达到机械行业标准《旱地栽植机械》(JB/T 10291-2013)中的相应要求;直立度合格率随栽植频率先增加,栽植频率75株/min时达到最大,然后略有下降,在栽植频率为45~96株/min范围内其平均值为96.7%~97.8%,不同栽植频率时直立度合格率均达到农业行业标准《油菜移栽机质量评价技术规范》(NY/T 1924-2010)中直立度合格率的规定值。旱地蔬菜钵苗自动移栽机低速、高速移栽作业时,自动送苗机构、取苗机构、栽植器的工作配合协调,移栽性能良好。
[1] Parish R L. Current developments in seeders and transplanters for vegetable crops[J]. Hort Technology, 2005, 15(2): 346-351.
[2] 于晓旭,赵匀,陈宝成,等.移栽机械发展现状与展望[J].农业机械学报,2014,45(8):44-53.Yu Xiaoxu, Zhao Yun, Chen Baocheng, et al. Current situation and prospect of transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(8): 44-53. (in Chinese with English abstract)
[3] 王俊,杜冬冬,胡金冰,等. 蔬菜机械化收获技术及其发展[J]. 农业机械学报,2014,45(2):81-87.Wang Jun, Du Dongdong, Hu Jinbing, et al. Vegetable mechanized harvesting technology and its development[J].Transactions of the Chinese Society for Agricultural Machinery,2014, 45(2): 81-87. (in Chinese with English abstract)
[4] 向伟,吴明亮,徐玉娟. 幼苗移栽机械研究现状与发展趋势[J]. 农机化研究,2015,37(8):6-9,19.Xiang Wei, Wu Mingliang, Xu Yujuan. Present status and prospects of seedling transplanting machinery[J]. Journal of Agricultural Mechanization Research, 2015, 37(8): 6-9, 19.(in Chinese with English abstract)
[5] 梁喜凤,蔡阳阳,王永维. 番茄钵苗自动移栽钵体物理机械特性试验[J]. 浙江大学学报:农业与生命科学版,2015,41(5):616-622.Liang Xifeng, Cai Yangyang, Wang Yongwei. Experiment on physical and mechanical properties of tomato seedling pot for automatic vegetable transplanter[J]. Journal of Zhejiang University: Agric. & Life Sci., 2015, 41(5): 616-622. (in Chinese with English abstract)
[6] 倪有亮,金诚谦,刘基. 全自动移栽机取送苗系统的设计与试验[J]. 农业工程学报,2015,31(23):10-19.Ni Youliang, Jin Chengqian, Liu Ji. Design and experiment of system for picking up and delivering seedlings in automatic transplanter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015,31(23): 10-19. (in Chinese with English abstract)
[7] 胡建平,张晨迪,王留柱,等. 全自动温室钵苗移栽机设计与试验[J]. 农业机械学报,2016,47(增刊1):149-154.Hu Jianping, Zhang Chendi, Wang Liuzhu, et al. Design and experiment on automatic greenhouse seedling transplanting machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(Supp.1): 149-154. (in Chinese with English abstract)
[8] 胡建平,靳合琦,常燕超,等. 基于 Delta并联机构钵苗移栽机器人尺度综合与轨迹规划[J]. 农业机械学报,2017,48(5):28-35.Hu Jianping, Jin Heqi, Chang Yanchao, et al. Dimensional synthesis and trajectory planning of plug seedling transplanting robot based on delta parallel mechanism[J].Transactions of the Chinese Society for Agricultural Machinery,2017,48(5):28-35. (in Chinese with English abstract)
[9] 刘敏,张明,绪言,等. 2ZBZ-2A 型移栽机栽植机构运动学分析与试验[J]. 农机化研究,2015, 37(11):31-36.Liu Min, Zhang Ming, Xu Yan, et al. Kinematics analysis and experiment on transplanting apparatus of 2ZBZ-2A transplanter[J]. Journal of Agricultural Mechanization Research, 2015, 37(11): 31-36. (in Chinese with English abstract)
[10] Satpathy S K, Garg I K. Effect of selected parameters on the performance of a semi-automatic vegetable transplanter[J].Agricultural Mechanization in Asia, Africa & Latin America,2008, 39(2): 47.
[11] 金诚谦,吴崇友,袁文胜. 链夹式移栽机栽植作业质量影响因素分析[J]. 农业机械学报,2008,39(9):196-198.Jin Chengqian, Wu Chongyou, Yuan Wensheng. Study on the quality of seeding transplanting factors of chain type transplanter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2008, 39(9): 196-198. (in Chinese with English abstract)
[12] 胡军. 挠性圆盘式大葱移栽机的优化设计与试验研究[D].北京:中国农业大学,2003.Hu Jun. The Optimum Design Method and Test of Scallion Transplanter with Two Flexible Metal Disks[D]. Beijing:China Agricultural University, 2003. (in Chinese with English abstract)
[13] 王石,王笑岩,李成华. 基于量子遗传算法的挠性圆盘式移栽机投苗系统参数优化方法[J]. 中国农机化学报,2014,35(2):139-142.Wang Shi, Wang Xiaoyan, Li Chenghua. Parameters optimization of soft disc-type vegetable seedling transplanting mechanism based on quantum genetic algorithm[J]. Journal of Chinese Agricultural Mechanization, 2014, 35(2): 139-142. (in Chinese with English abstract)
[14] 董哲,林选知,张瑞勤,等. 导苗管式移栽机的烟苗移栽质量影响因素分析[J]. 农机化研究,2012, 34(4):38-41.Dong Zhe, Lin Xuanzhi, Zhang Ruiqin, et al. Quality of fluecured tobacco seedling transplanting factors analysis with transplanter with chute[J]. Journal of Agricultural Mechanization Research, 2012, 34(4): 38-41. (in Chinese with English abstract)
[15] 倪向东,梅卫江. 导管式番茄移栽机的设计[J]. 农机化研究,2011,33(2):84-86.Ni Xiangdong, Mei Weijiang. Design on the tomato transplanting machine[J]. Journal of Agricultural Mechanization Research,2011, 33(2): 84-86. (in Chinese with English abstract)
[16] 张茜,刘磊,陈永成,等. 吊篮式移栽机栽植器运动轨迹研究[J]. 农业机械,2009(14):107-109.Zhang Qian, Liu Lei, Chen Yongcheng, et al. Research of movement trajectory of transplanting device for basket-type transplanter[J]. Farm Machinery, 2009(14): 107-109. (in Chinese with English abstract)
[17] 崔巍,赵亮,宋建农,等. 吊杯式移栽机栽植器运动学分析与试验[J]. 农业机械学报,2012,43(增刊1):35-38.Cui Wei, Zhao Liang, Song Jiannong, et al. Kinematic analysis and experiment of dibble-type planting devices[J].Transactions of the Chinese Society for Agricultural Machinery,2012, 43(Supp.1): 35-38. (in Chinese with English abstract)
[18] 王永维,唐燕海,王俊,等. 蔬菜钵苗高速移栽机吊杯式栽植器参数优化[J]. 农业机械学报,2016,47(1):91-100.Wang Yongwei, Tang Yanhai, Wang Jun, et al. Parameters’optimization for the dibble-type planting apparatus of vegetable pot seedling transplanter in high-speed condition[J].Transactions of the Chinese Society for Agricultural Machinery,2016, 47(1): 91-100. (in Chinese with English abstract)
[19] Choi W C, Kim D C, Ryu I H, et al. Development of a seedling pick-up device for vegetable transplanters[J]. Trans.Amer. Soc. Agric. Eng, 2002, 45(1): 13-19.
[20] 陈建能,王伯鸿,张翔,等. 多杆式零速度钵苗移栽机植苗机构运动学模型与参数分析[J]. 农业工程学报,2011,27(9):7-12.Chen Jianneng, Wang Bohong, Zhang Xiang, et al. Kinematics modeling and characteristic analysis of multi-linkage transplanting mechanism of pot seeding transplanter with zero speed[J].Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2011, 27(9): 7-12. (in Chinese with English abstract)
[21] 张敏,冯江,宫成宇,等. 全自动旱田移栽机顶出机构的机理分析[J]. 农机化研究,2014, 36(3):85-89.Zhang Min, Feng Jiang, Gong Chengyu, et al. Analysis on ejector seedlings mechanism of automatic dry farmland transplanting machine[J]. Jourmal of Agricultural Mechanization on Research, 2014, 36(3): 85-89. (in Chinese with English abstract)
[22] 韩长杰,郭辉,张学军,等. 硬质穴盘苗自动取苗装置设计[J]. 农业工程,2013, 3(4):99-102.Han Changjie, Guo hui, Zhang Xuejun, et al. Design of automatic hard-plug-seedlings pick device[J]. Agricultural Engineering, 2013, 3(4): 99-102. (in Chinese with English abstract)
[23] 俞高红,陈志威,赵匀,等. 椭圆-不完全非圆齿轮行星系蔬菜钵苗取苗机构的研究[J]. 机械工程学报,2012,48(13):32-39. (in Chinese with English abstract)Yu Gaohong, Chen Zhiwei, Zhao Yun, et al. Study on vegetable plug seedling pick-up mechanism of planetary gear train with ellipse gears and incomplete non-circular gear[J]. Journal of Mechanical Engineering, 2012, 48(13): 32-39. (in Chinese with English abstract)
[24] 叶秉良,李丽,俞高红,等. 蔬菜钵苗旋转式取苗机构动力学分析与试验[J]. 农业机械学报,2014,45(6):70-78.Ye Bingliang, Li Li1, Yu Gaohong, et al. Dynamics analysis and test of rotary pick-up mechanism for vegetable potseedling[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 70-78. (in Chinese with English abstract)
[25] 韩绿化,毛罕平,严蕾,等. 穴盘育苗移栽机两指四针钳夹式取苗末端执行器[J]. 农业机械学报,2015,46(7):23-30.Han Lühua, Mao Hanping, Yan Lei, et al. Pincette-type endeffect using two fingers and four pins for picking up seedings[J].Ransaction of Chinese Society for Agricultural Machinery,2015, 46(7): 23-30. (in Chinese with English abstract)
[26] 李华,曹卫彬,李树峰,等. 2ZXM-2型全自动蔬菜穴盘苗铺膜移栽机的研制[J]. 农业工程学报,2017,33(15):23-33.Li Hua, Cao Weibin, Li Shufeng, et al. Development of 2ZXM-2 automatic plastic film mulching plug seedling transplanter for vegetable[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 23-33.(in Chinese with English abstract)
[27] 刘姣娣,曹卫彬,田东洋,等. 基于苗钵力学特性的自动移栽机执行机构参数优化试验[J]. 农业工程学报,2016,32(16):32-39.Liu Jiaodi, Cao Weibin, Tian Dongyang, et al. Optimization experiment of transplanting actuator parameters based on mechanical property of seedling pot[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(16): 32-39. (in Chinese with English abstract)
[28] 韩绿化,毛罕平,胡建平,等. 蔬菜穴盘苗自动精确移栽组合式取苗机构设计与测试[J]. 农业工程学报,2015,31(增刊 2):17-23.Han Lühua, Mao Hanping, Hu Jianping, et al.Design and test of combined pick-up device for automatic and precise transplanting of vegetable plug seedlings[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(Supp.2): 17-23. (in Chinese with English abstract)
[29] 杨传华,方宪法,杨学军,等. 基于PLC的蔬菜钵苗移栽机自动输送装置[J]. 农业机械学报,2013,44(增刊 1):19-23.Yang Chuanhua, Fang Xianfa, Yang Xuejun, et al. Automatic delivery mechanism of potted-seedling for vegetable transplanter based on PLC[J]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 19-23. (in Chinese with English abstract)
[30] 裘利钢,俞高红. 蔬菜钵苗自动移栽机送苗装置的设计与试验[J]. 浙江理工大学学报,2012,29(5):683-687,692.Qiu Ligang, Yu Gaohong. Design and test of a seedling-delivering device on an automatic transplanter for pots of vegetable seedlings[J]. Journal of Zhejiang Sci-Tech University, 2012,29(5): 683-687,692. (in Chinese with English abstract)
[31] 中华人民共和国工业和信息化部. JB/T 10291-2013旱地栽植机械行业标准[S]. 北京:机械工业出版社,2013.
[32] 农业部农产品质量安全监管局. NY/T 1924-2010 油菜移栽机作业质量评价技术规范[S]. 2010.