多旋翼植保无人机悬停下洗气流对雾滴运动规律的影响
2018-02-28杨风波薛新宇周晴晴
杨风波,薛新宇,蔡 晨,周晴晴
多旋翼植保无人机悬停下洗气流对雾滴运动规律的影响
杨风波,薛新宇※,蔡 晨,周晴晴
(农业部南京农业机械化研究所,南京 210014)
多旋翼植保无人飞机在农药喷洒和授粉作业等相关领域已开展广泛应用,但存在风场分布不明晰导致的分布不均问题。针对六旋翼植保无人飞机,结合雷诺平均N-S方程及Realizable-湍流模型,建立了下洗气流三维数学模型,风场测试及非定常计算表明特征点向速度的测量和模拟值相对误差在9%以内,验证了风场数值计算的可靠性;在机翼旋转诱导及外界气压的挤压下,下洗气流纵向主截面呈现出“收缩-扩张-再收缩”现象;“旋翼间干扰”使得下洗风场湍流效应明显,横截面的旋翼间区域出现了气流“引入”及“导出”区。引入雾滴离散相,并对连续相进行动量、能量方程修正,建立喷头含雾滴离散相的两相流模型,结合喷头喷幅试验来验证了该两相流模型计算雾滴运动轨迹的有效性;结果表明,粒径越小,雾滴水平方向分速度衰减越快,喷幅越小;雾滴粒径越大,竖直方向的最终分速度越大。建立了六旋翼植保无人飞机悬停条件下含雾滴离散相的三维两相流模型,计算分析表明,雾滴主要分布在“旋翼间干扰”明显的3个“引入区”、3个“导出区”,下洗区内侧雾滴群交织,外侧大雾滴周向水平行程更大进而分布在外围;当雾滴粒径小于200m时,雾滴运动范围无法覆盖全部的“引入区”,雾滴多分布在下洗区中心;当雾滴粒径大于250m时,雾滴运动区域逐渐覆盖所有“引入区”、“导出区”。该研究可为飞行施药过程中迎风气流、下洗气流、瞬时横风耦合风场扰动下雾滴的漂移、沉积研究提供参考。
无人飞机;喷雾;模型;下洗气流;风场测试;离散相;运动规律
0 引 言
相对于传统的背负式[1-2]、担架式喷雾机及自走式喷杆喷雾机[3],航空植保机摆脱了地面作业模式,突破了作物种类(低、高杆作物等)的限制,具有施药快、效率高及应对突发灾害能力强等优点[4-5],成为植保作业重要手段。相对于地面机具,空中作业条件及气流影响使得航空施药的沉积问题更加复杂[6-7],这方面的研究尚有不足。引领农业航空发展的美国,对于航空施药中药液雾滴的沉积问题进行了大量研究[8-9]。
20世纪70年代,美国农业部林业局的Dumbauld等联合美国军方开发了适用于固定翼飞机施药的FSCBG沉积预测模型[10],基于成熟的高斯烟羽模型来计算药液雾滴的沉积规律,对飞机近场复杂气流影响区的沉积预测效果不太理想[11]。鉴于此,美国农业部林业局、美国宇航局和美国军方基于雾滴轨迹模型合作开发了AGDISP模型[12],考虑了飞机近场尾涡,其设计目的是应用于林业、农业等航空喷洒的沉积计算[13]。为提升对复杂气流现象的处理精度,美国喷雾漂移研究组,环保局和林业局基于AGDISP模型合作开发了AgDRIFT模型,AgDRIFT模型涵盖了飞机机型、飞机涡流、喷嘴种类、气象因素等[14],且基于以上模型的研究仍在继续发展之中[15-16]。以上基于美国农场规模化经营应用现状,局限于有人驾驶固定翼飞机和直升机,关于小型旋翼机的相关研究较少。其中,多旋翼机喷雾涉及各旋翼转向互不相同而出现的小尺度局部复杂下洗风场,是药液雾滴和风场的强耦合过程,与固定翼飞机差异显著,已有研究可以得知,风场是影响雾滴运动分布的关键因数。
目前,小型旋翼机在中国广大丘陵、山地、平原等地域有广阔应用前景。国内学者在多旋翼植机的下洗风场、雾滴沉积分布等方面进行了研究。汪沛等[17-19]通过田间试验的方法讨论了单旋翼、多旋翼机施药过程中风场分布规律;Qin等[20-22]通过试验设计及田间试验的方法研究了单旋翼机不同工作参数条件对雾滴沉积分布的影响。目前的相关研究多采用试验的方法,采用计算流体力学(CFD)的方法对旋翼机下洗气流进行数学解析、研究下洗气流对雾滴运动分布的影响较少。CFD在航空航天[23-24]、内燃机[25]、汽车[26]等领域有广泛应用,由于该方法能够较为准确捕捉湍流场的内部流动细节,弥补了AGDISP和AgDRIFT模型在解析复杂流动方面的不足,对雾滴运动的建模正不断完善,在植保喷雾领域逐步得到认可[27-28]。在航空植保方面,张宋超等[29]通过田间试验和数值模拟研究了N-3型单旋翼植保无人飞机在一定飞行条件和自然风条件下非靶标区域的药液飘移情况,而关于多旋翼植保无人飞机施药方面的相关研究报道较少。
1 多旋翼植保无人飞机的工作原理
1.1 多旋翼植保无人飞机的工作原理
本文以六旋翼植保无人飞机系统为对象,六旋翼系统如图1所示,6个旋翼呈60°均布。图1中OXYZ为绝对坐标系,OXYZ为六旋翼系统自身相对坐标系,1、2、3、4、5、6分别表示6个旋翼产生的升力。该机通过调整各旋翼的转速产生不同的升力,以匹配无人飞机的载质量及飞行姿态,本文研究悬停状态下的下洗气流场与雾流场,相邻旋翼的转速相同,但转速相反。

注:f1、f2、f3、f4、f5、f6分别表示6个旋翼产生的升力。
1.2 数值计算方法
1.2.1 基本控制方程
对于独立的无人飞机旋翼悬停流场,可以将坐标系固连在旋翼上(即旋转坐标系),相比于固定(惯性)坐标系,旋转(非惯性)坐标系下的RANS方程附加了一个由于旋转带来的源项,方程具体形式可表示为[30]

其中

1.2.2 离散相运动方程
雾滴在流场中除受重力以外,还受风场多种作用力,包括黏性力、惯性力、流场压强梯度力等。雾滴体积很小,因此忽略旋转运动,离散相运动方程根据Crowe和Smoot等[31-32]提出的欧拉-拉格朗日方法求解。




式中为雾滴速度矢量,m/s;式(2)等号右侧第一项为重力与流体浮力的叠加,N;第二项表示黏性力,是黏性力系数表达式,N;C为阻力系数;为相对于流场运动的雷诺数表达式;为流体与粒子相互冲击产生的力;为由压强梯度力产生的作用力,N。
粒子的动量变化是由流体引起的,因此流体在影响粒子运动的同时粒子运动也对流场产生影响,两者之间有动量交换。式(1)中有5个分方程,第1个分方程为质量守恒方程,第(2)~(4)个分方程为动量守恒方程,第5个分方程为能量守恒方程。设流场控制单元内在时刻共有N个粒子,将所有粒子对流场产生的动量影响以源项的形式添加到式(1)动量守恒方程的等号右边,则有

式中m是控制单元内第个粒子的质量,kg;为第个粒子的速度矢量,m/s;是第个雾滴的黏性力,N;为流体与第个雾滴粒相互冲击产生的力,N;为由风场压强梯度对第个雾滴产生的作用力,N。
雾滴粒子与流场还存在热交换,引起粒子、流场温度变化。将控制体内所有粒子与流场之间的热交换以源项的形式加入式(1)的能量守恒方程的等号右边,则有

式中A是第个雾滴表面积,m2;是控制单元内流场温度,K;T是第个雾滴的温度,K;k是第个雾滴与流场间的传输系数。
1.3 计算方法
流场计算中含有旋翼的高速旋转,湍流模型采用更适合于大剪切流动的Realizable-模型[33]。使用有限体积法,对控制方程进行离散,使用耦合求解器进行计算,为保证计算的稳定性和收敛性,选用耦合格式进行迭代。
2 悬停下洗风场数值计算的试验验证
文献[34]针对六旋翼植保无人飞机在空载悬停条件的下洗气流做了流场计算及详细分析,本文在此基础上展开载药3 kg条件悬停下洗风场数值计算的试验验证。以西安韦德沃德航空科技有限公司的SLK-5型六旋翼植保无人飞机为对象展开研究。
执行部件旋翼为复杂曲面,需进行三维逆向重构。采用Optimscan5-2015011K05型三维扫描仪对旋翼进行三维扫描,输出旋翼各扫描面点云数据,采用Geomagic Studio软件对各扫描面点云进行后处理,实现旋翼的三维曲面重构。对旋翼进行六面体结构网格划分,包裹旋翼的第一层网格高度为0.20 mm,而长、宽为1.60 mm、0.60 mm,第一层网格单个网格的体积为0.192 mm3左右,如图2a所示(考虑曲率的存在,不同轴向位置会略有差异)。为尽量减少网格数量,降低计算成本,旋翼第一层网格往外,网格的高度逐渐增大,最后每一只旋翼包裹的网格数量为42万(图2a为半只旋翼)。
为保证数值计算的精度,将总模型计算区域分块处理并进行结构化网格离散;计算区域共13个区域,6个旋翼区,6个喷头区(喷头在轴方向2个旋翼正下方,其余4区是为使计算域对称而设置的)和一个外围计算域,区域与区域之间交界面通过Interface连接,区域交界面处的网格尺度基本一致;为降低计算成本,外围计算域的径向及下洗区向网格逐渐稀疏,总网格数量560 万左右。由于下洗气流发展及雾滴运动是瞬态的,动网格模型采用滑移网格模型。此节不考虑雾场,对载药3 kg条件悬停下洗风场进行非定常计算,时间步长起始为1×10-5s,待残差稳定后取5×10-5s,风场发展时间达到2.28 s左右,悬停下洗气流发展到地面并趋于稳定。

图2 旋翼结构化网格及网格质量评价指标分布
包裹旋翼第一层网格的厚度对气流场及气动特性影响较大,而评价网格模型是否合理的评价指标是数值计算后旋翼壁面的[35],如式(10)所示。

式中Δ为第1层网格到物体表面的距离,m;为流体密度,kg/m3;为流体的黏度,Pa·s;τ为模型表面切应力,Pa。式(10)表明,+值与第1层网格厚度成正比。
图2b给出了下洗风场瞬态计算达到2.28 s时刻后6只旋翼的壁面示意图,从图中可以看出旋翼壁面绝大多数区域在10以下,在空气和旋翼分离区域值最大,基本控制在25以下,总体来讲旋翼的网格划分基本满足下洗风场的计算要求。
在进行风场测试试验时,多旋翼植保无人飞机悬停离地高度为3.55 m。风速测试点布控在旋翼的下方,离地高度分别为2.55、1.55 m,共12个测试点,无人飞机悬停时载质量为3 kg。采用“Kestrel4500”型数字式风速测量仪(美国Kestrel公司生产,设备精度±3%)对12 个测量点方向的速度进行逐个测量。风速测试现场如图3a所示,测试选在微风天气进行,自然风速0.2~0.3 m/s,温度为32 ℃。
测得的12个观测点方向的观测点风速稳定后的脉动平均值分别为9.1、9.3、9.0、9.1、9.2、9.1、6.1、6.3、6.4、5.9、6.0、6.2 m/s。进行数值计算观测点风速稳定后的脉动平均值分别为9.50、9.6、9.56、9.7、9.6、9.75、6.52、6.7、6.63、6.35、6.5、6.39 m/s。图3b、3c给出了载荷3 kg非定常数值计算2.28 s时刻气流稳定后、切面的速度绝对值分布云图,图3d给出了压力背景下=1.226 m的切面详细的流线图。从表1可以看出风速误差在9%以内,说明数值计算基本满足工程计算的精度要求。
由图3和表1可知,风场的单点风速测量对风场的研究效果有限,对风场的细节描述较无力,数值模拟可作为研究风场演化及流动规律的有效手段,是对单点风速测试的有效补充。由于六旋翼植保无人飞机相邻旋翼的转速相反,使得其下洗气流场呈现比较特殊的现象,文献[34]中已有详细分析。
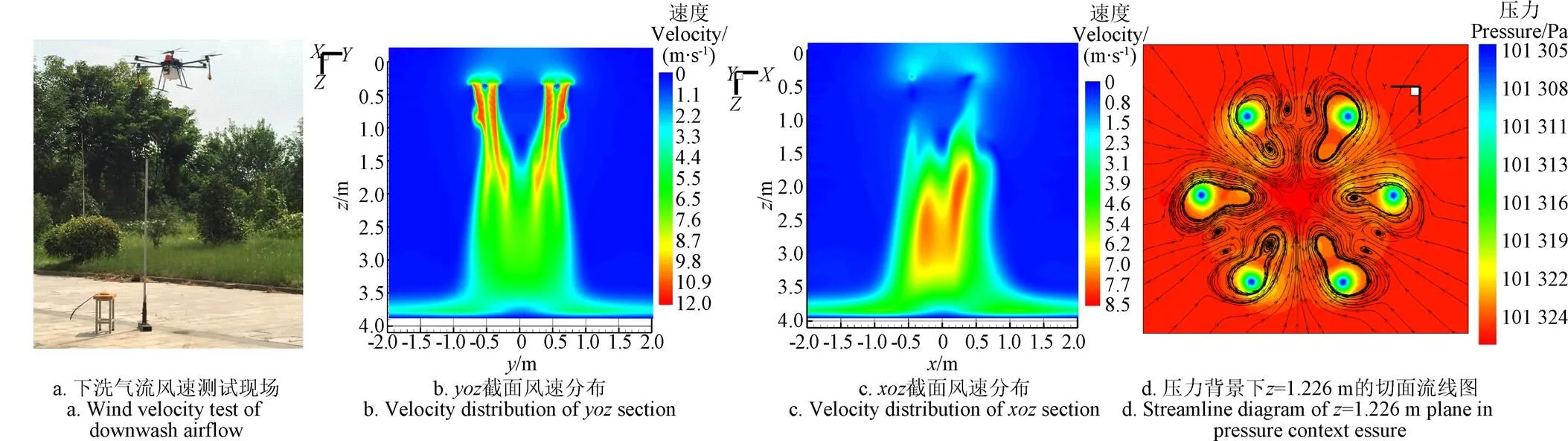
图3 载荷3 kg悬停下洗气流测试及数值计算2.28 s时刻的流场结果

表1 标记点z方向速度的测试值及计算值对比
3 含雾滴运动的两相流计算的试验验证
不研究转杯内连续相液态水变为离散相雾滴的雾化过程,不讨论离散相液滴聚集后变成连续相液态水的逆物理过程,将离散的雾滴作为研究对象,研究雾滴在风场影响下的运动规律,雾滴运动到固壁时就被固壁吸附。
基本假设:1)空气为理想气体,服从理想气体状态方程;2)雾滴为球形,下洗气流风速较小,不考虑雾滴的破碎;3)不考虑蒸发对雾滴的影响。
3.1 雾滴粒径测试
室外阵风现象较严重,悬停下洗风场受到忽强忽弱横风扰动,对下洗区雾滴沉积喷福的测量带来强干扰;另外,由于在室内无人飞机无法稳定接受北斗/GPS信号,对飞行造成极大安全隐患。鉴于此,在室内通过多旋翼植保无人飞机搭载离心雾化转杯的雾滴粒径测试分析、及喷幅的测定试验来分析一定雾滴谱特征的雾滴的运动规律,基于该试验建立含雾滴运动的两相流计算模型,并通过该试验来验证数值计算模型。试验测试系统如图4a所示,离心雾化后的雾滴经过出口的限制以雾化盘切线方向的水平速度离开出口,如图4b所示。
图4a中供液系统的隔膜泵额定电压12 V,试验流量700 mL/min;粒径测试系统由DP-02型激光粒度分析仪(珠海欧美克仪器有限公司生产,设备精度±3%))及激光粒度分析系统组成。该系统本次测量的工作参数如下:调节变频器频率使转杯转速为3600 r/min,调节回水阀开度使流量达到700 mL/min。试验室温度(30±2) ℃,相对湿度35%±10%,喷头雾滴出口离地面0.3 m,室内无风。将激光粒度仪打开并预热15 min,打开雾滴粒径测试软件,将系统自动对中调节,使背景光在0环的光柱最高,第1环高度小于0环的1/4,到12环光柱高度依次降低;滤除背景光,并开始喷雾,系统测量、统计完成之后,停止喷雾,测量获得的雾滴平均微分分布如图4c所示。

1.粒径分析系统 2.变频器 3.压力表 4.电机 5.转杯 6.激光粒度仪
1.Particle size analysis system 2.Frequency converter 3.Pressure gauge 4.Electric machinery 5.Nozzle 6.Laser particle size analyzer
a. 雾滴粒径微分分布测试方案
a. Droplet size differential distribution test program
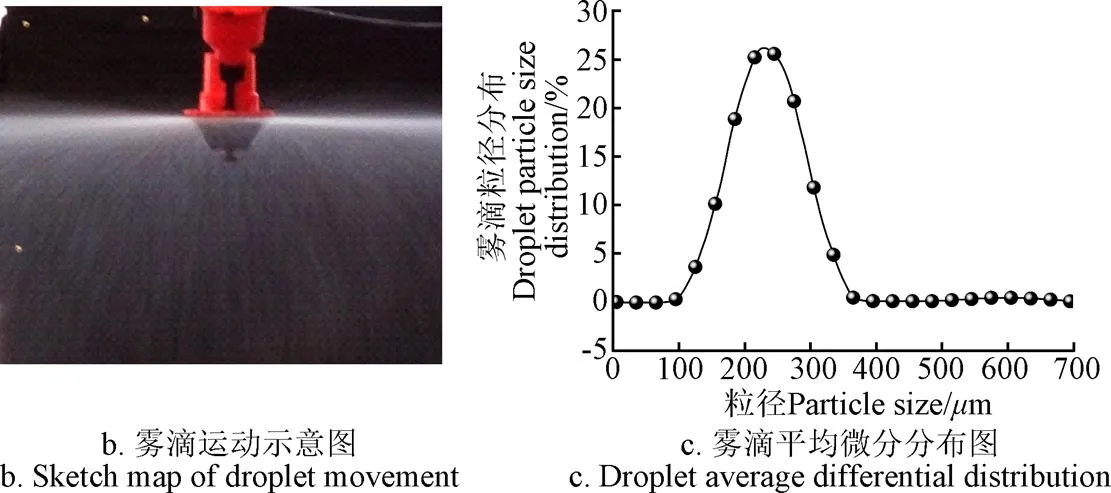
图4 雾滴粒径测试方案及结果
3.2 雾滴沉积边界测试
本文采用双注水口转杯离心雾化喷头,注水口间隔180°并和杯底部垂直,基本保证了该型雾化喷头喷幅在各个方向上的均匀性。该型喷头有效喷幅的测试方案如图5a所示。在垂直正交的4个方向上(1000 mm)依次摆放21个相同小烧杯,和雾滴粒径微分分布测试条件一样,喷雾10 min后,用量筒测量烧杯里的雾量,工作条件与雾滴粒径测量试验相同。转杯正下方为坐标原点,试验结束后统计4个方向的雾滴沉积量平均值如图5b所示(液态水沉积量不显著的默认为0),从图5b可知雾滴沉积量随着距喷雾中心距离的增加呈现先增大后减小的趋势。当沉积量积累值等于取样雾滴沉积量总和的95%时,对应雾滴沉积位置作为雾滴落点的有效边界,图中显示为0.75 m。

图5 喷头喷幅测试
3.3 含雾滴的两相流模型验证及分析
针对该型喷头的喷幅测试方案,建立含雾滴离散相的三维两相流模型。由于雾滴数目巨大,跟踪每个雾滴的运动轨迹耗费计算量非常大,为减少计算量将计算域限制在一定高度。结合喷幅试验来看,无风条件下,雾滴下降0.3 m后,雾滴基本达到最大喷幅,所以雾滴的沉降高度定为0.3 m。释放雾滴的雾化盘直径为58 mm、高度为10 mm,建模思路和第2节一致,模型建立后,六面体网格173.7万。喷头的旋转速度、流量和试验一致为3600 r/min、700 mL/min,喷头出口雾滴以试验中的雾滴微分分布规律(为减小计算量,将粒径范围设置为100到320m)均布在喷头出口,雾化盘旋转的切向速度就是雾滴离开雾化盘的切向速度,均为10.9 m/s,雾滴从喷头侧面切向喷出。经过1.56 s非定常数值计算,喷幅计算值为0.8 m左右(图6a所示),和4.2小节中的试验值较吻合。
图6a给出纵切面雾滴粒径分布规律,且图6b给出了=-0.26 m横截面雾滴粒径及沉积浓度分布图。结合图6a、6b可知,雾滴粒径越大,喷幅越大,这说明雾滴粒径越小,径向(水平)速度衰减更快。将2.2小节式(2)分解到轴方向,水平速度主要受气流黏性力、流体与粒子相互作用力、压强梯度力等影响。这3个因素中,后2个因素决定于雾滴和所在离散单元内气流的相对速度,雾滴喷出喷头时,2个因素基本相同。气流扰动速度为0,雾滴均受到气流反向黏性力,而不同粒径雾滴流体黏性力明显不同,结合式(2)、(3)、(4)、(5)可知,雾滴粒径越大,其水平逆向的加速度越小,且呈几何级数关系,水平速度衰减明显更慢,故大粒径雾滴喷幅更大,如图6a所示,且出现了图6b横向截面上雾滴沉落区有一个空心无雾滴区域,和图6c对应,这是由于进行含离散相两相流计算时为减小计算量将雾滴粒径设置在了100到320m之间。从图6b可看出,在横向截面=−0.26 m中,随着离喷头中心的距离越来越远,在径向上沉积率先增大后减小,这和图4c、图5b相对应,中等粒径雾滴喷幅居中,且微分分布比例也越大。由于雾滴和气流的相互作用,雾滴降落区气流会被加速,湍流对雾滴分布有一定影响,如图6b所示,雾滴径向沉积浓度有多个波峰交替出现。

图6 粒径微分分布工况下雾滴运动及分布
3.4 雾滴粒径对雾滴运动规律的影响
通过含离散相的两相流计算对不同粒径雾滴的运动轨迹展开研究。模型中的工作参数和3.2小节中一致,仅将喷头雾滴微分分布换成单一粒径,分别为100、150、200、250、300、350m共6种。限于篇幅,图7给出其中3种工况截面雾滴运动分布规律。由图7可知,不同粒径的雾滴运动轨迹差异明显,在水平初始速度相同情况下,雾滴粒径越大,喷幅越大;表2给出6种粒径工况雾滴的喷幅分别为178、314、453、592、705、826 mm,而350m粒径雾滴的喷幅几乎为100m雾滴对应值的5倍。大雾滴受到竖直方向的阻力较小,落地竖直方向速度也更大,如表2所示。
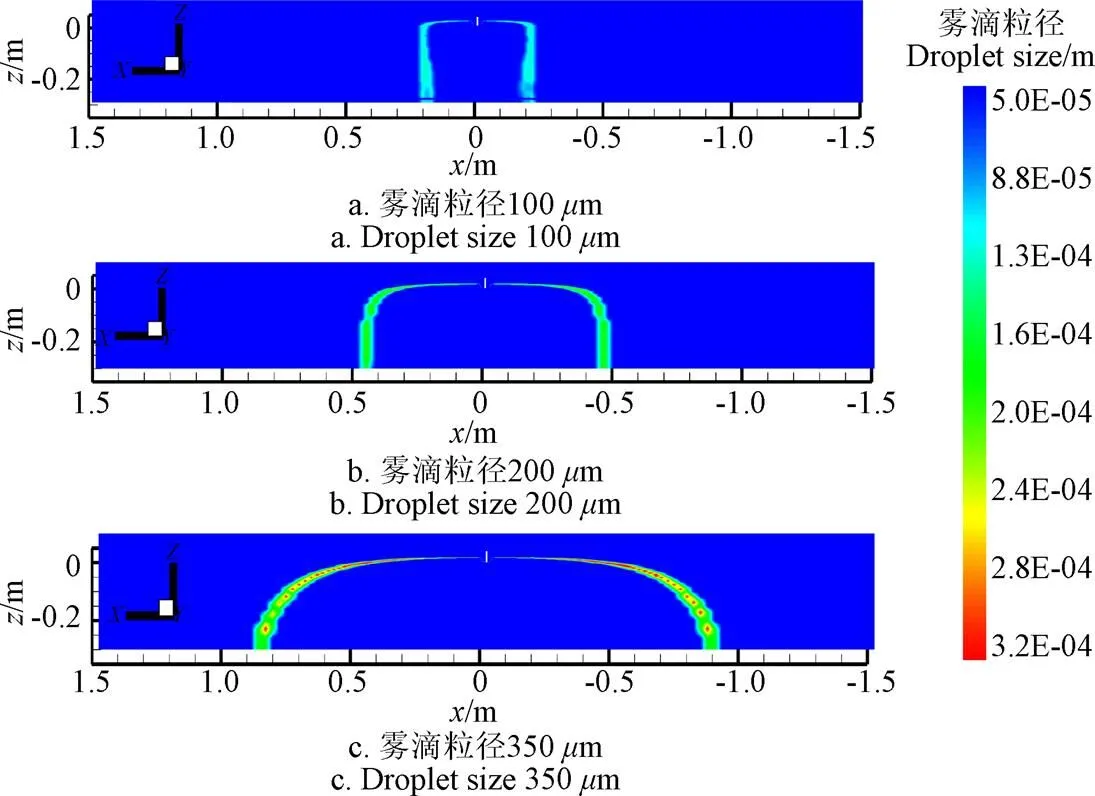
图7 均匀雾滴条件下雾滴运动及分布

表2 不同雾滴粒径喷幅对比
4 悬停下洗气流对雾滴运动分布的影响
4.1 粒径微分分布雾滴的运动分布规律
在轴两端对应的旋翼正下方235 mm处增加一对喷头,讨论悬停下洗气流对粒径呈微分分布的雾滴运动规律的影响。过程如下:首先对载药3 kg悬停下洗气流进行非定常计算(2只喷头在轴方向对称分布,转向和正上方旋翼一致),悬停下洗气流的发展是一个瞬态过程,待下洗气流发展到地面并趋于稳定后,启动含雾滴的两相流模型,释放雾滴(雾滴粒径和第3.3节中一致),进行非定常计算,待雾滴在悬停下洗气流的作用下,运动、沉积规律趋于稳定后计算停止,提取结果。图8a、8b给出了及截面雾滴粒径分布规律。

图8 粒径微分分布工况下雾滴运动及分布规律计算结果
由于旋翼的高速旋转,雾滴一方面受下洗气流向下作用,另一方面受到旋翼旋转方向的周向诱导力(不同方向黏性力)的作用,所以雾滴一方面有水平方向的运动及竖直方向的运动,同时还有绕下洗区中心的旋转运动。图8a显示,2个喷头内侧雾滴存在交织的情况,在旋翼下洗风场的扰动下,图8a中雾滴的运动轨迹并没有呈现出抛物线的运动轨迹,而是在横向位移达到最大值(大粒径雾滴横向位移也最大)后有反向运动的趋势,最后在地效气流的作用下雾滴的横向位移重新增大。结合图3b可作如下说明:下洗核心区气流速度大,该区压力小于大气压,导致大气对下洗区有压缩的外力,且随着下洗区向下发展,风速逐步衰减,下洗区和外围压差减小,下洗区呈现“先收缩、后扩张”的“喇叭状”,这种气流变化作用于雾滴,使雾滴群在横向位移达到最大值后发生反向水平运动。
图8b显示,在截面,轴正向雾滴粒径大于轴负方向。结合图3c,3d可以作如下解释,由于“旋翼间干扰”(转向相反)存在,下洗气流截面速度值明显不对称,内侧气流交汇区上方的“引入区3”(图3d、图9)有一个风速高峰区,而交汇区上方的“导出区1”风速值较低。
如图8c所示,下洗风场两侧未交汇前,2个速度“波峰”值差异明显。结合第4节可知,在横向速度衰减为0后,大雾滴水平方向位移更大,分布在雾滴群外围,在旋翼下洗气流的诱导下,雾滴发生周向运动,结合图8b可看出,在旋翼之间,外侧大雾滴在“引入区3”间向内气流的驱动下运动到该区域内部,而在图8d中可清晰看出大雾滴的运动规律;结合前面的分析及图8a、8b可知,喷头间喷幅交织区的多数小粒径雾滴在“导出区1”向外流动气流的驱动下运动到了该区域外部,呈现出了图8b中比较特殊的物理现象。
悬停状态下各旋翼的转速相反,下洗区会出现气流“引入区”、“导出区”相间分布的现象,如图9所示,离心雾化转杯位于图9中轴方向对称分布。
图9 引入、导出区域示意图
图8e、8f、8g、8h给出了两相流计算稳定后=1、3 m高度的截面雾滴分布规律。结合8a和图8e可以看出,=1 m的截面正是雾滴群在横向位移达到最大后发生反向移动的拐点处附近;而第4节的分析可知,大雾滴的横向位移更大,更易运动到下洗区外围,受到“引入气流”的作用,使其更易出现如图8a中发生周向旋转的现象,进而偏离喷头(轴两端对称分布)正下方区域。图8g中大雾滴继续发生周向运动,在=3 m高度上大粒径雾滴已基本集中到喷头正下方最远的引入区3。结合图8d可以看出,由于下洗气流场及雾流场的对称性,离机翼的垂直距离越远,大粒径雾滴越集中到第3个引入区,结合图3d、8d基本验证了雾滴的运动轨迹,即在下洗气流下压力及周向诱导力的共同作用下,雾滴群发生螺旋下降运动。图8f、8h分别给出这2个横截面雾滴的浓度分布,雾滴在进行螺旋下降运动过程中逐步散开,在=1 m高度雾滴未完全散开、分布较集中,随着进一步螺旋下降,雾滴在=3 m高度处逐步散开,分布更分散;结合图8g、8h及图9可知,雾滴主要分布区并不在旋翼正下方(以轴正向为起点计),而是在旋翼之间,即3个“引入区”、3个“导出区”,其中“导出区”的分布范围及浓度明显大于“引入区”。这是由于一方面中小粒径雾滴量更大且多数聚集在下洗区的几何中央(见图8a),在导出气流的驱动下,运动到了“导出区”;另一方面量更少的大中粒径雾滴在外围周向运动的过程中,被引入气流驱动到了“引入区”,且离喷头正下方最远的“引入区3”(即轴正向,见图8h、图9)沉积量最少。
4.2 均匀粒径雾滴的运动分布规律
前面一小节分析了粒径呈微分分布的雾滴的运动分布规律,分析表明,不同粒径雾滴在多旋翼下洗气流的扰动下分布位置有差异。鉴于此,本小节详细讨论粒径对雾滴运动规律的影响。在第4.1小节模型的基础上,将雾滴粒径分别设置为100、150、200、250、300、350m共6种工况,其他参数和第4.1节中一致。
各工况计算稳定后,表3给出了各工况每个“引入区”、“导出区”及中心区的雾滴浓平均值。限于篇幅,图10给出了其中3种工况在=3 m高度的横截面雾滴粒径、浓度分布规律。从图10a中各工况来看,不同粒径条件下,雾滴多分布在旋翼间的“引入区”及“导出区”。
当雾滴粒径小于150m时,雾滴周向的水平行程较小,2只喷头外侧绝大多数雾滴分布在其正上方旋翼所控制的2个“引入区(1、2)”及2个“导出区(2、3)”,2个喷头的内侧雾滴在下洗区的中间位置交织;当雾滴粒径处于200到250m之间时,雾滴周向的水平行程逐渐增大,由于雾滴是螺旋下降,结合图3d、图9进行分析,当水平行程达到一定值使得雾滴进入轴负方向附近的“导出区1”,在导出气流的驱动下,该粒径区域的雾滴可以运动到该“导出区”,覆盖了3个“导出区”及2个“引入区”;当雾滴粒径处于300到350m之间时,雾滴周向的水平行程已经足够大,进到了离喷头最远的“引入区3”附近,在引入气流的驱动下,雾滴发生反向运动、并沉积在“引入区3”,进而覆盖了3个“导出区”及3个“引入区”。在研究不同粒径雾滴运动分布规律时,喷头的流量是一致的,从图10b给出的不同粒径雾滴在相同工作条件下的浓度分布规律可以看出,当雾滴粒径小于200m时,雾滴分布区无法覆盖全部的“引入区”,雾滴多分布在下洗区的中心区;当雾滴粒径大于250m时,雾滴逐渐覆盖所有“引入区”、“导出区”。

表3 不同粒径雾滴工况主沉积区的雾滴浓度
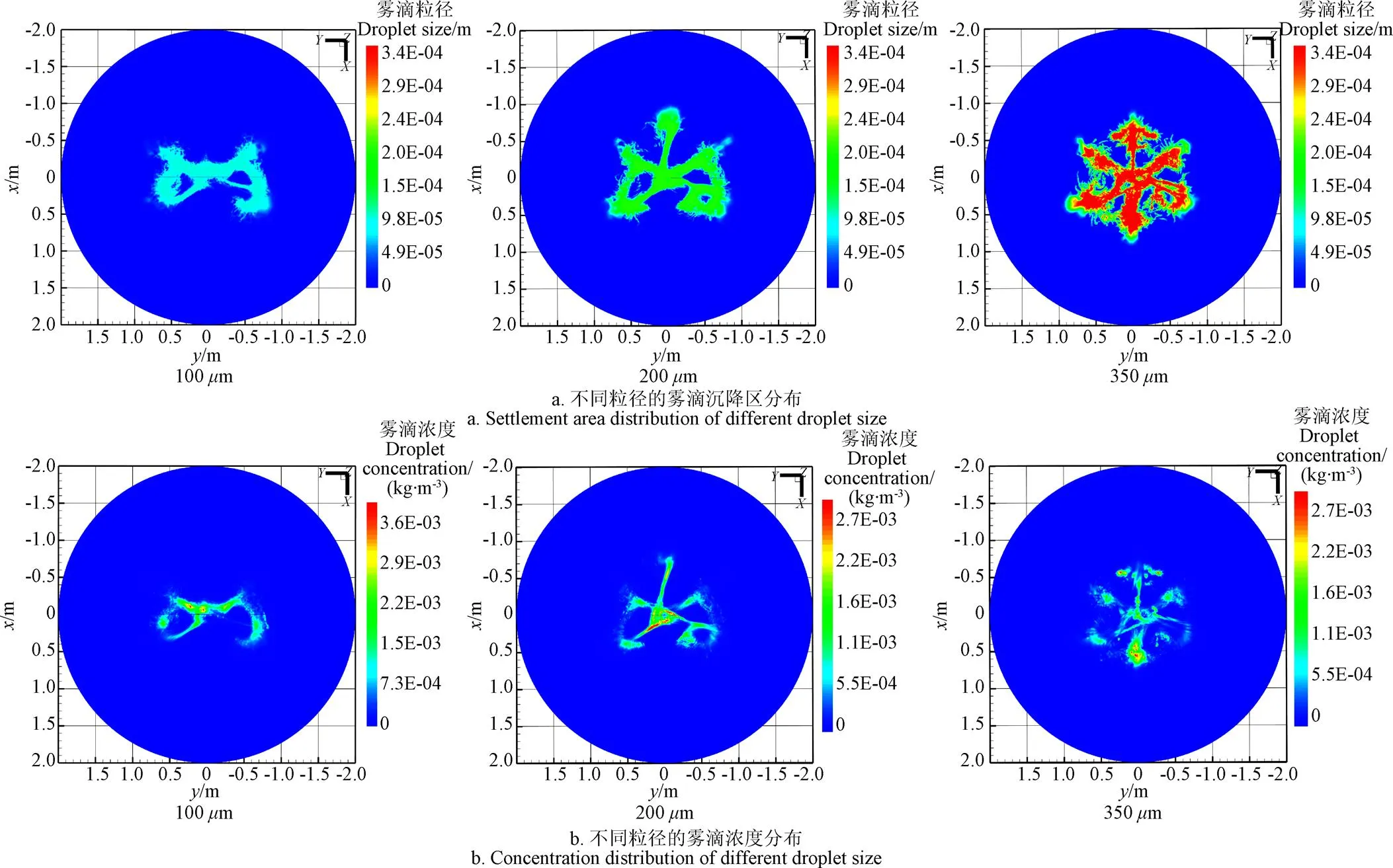
图10 均匀雾滴条件下在z=3 m高度xoy切面雾滴分布
5 结 论
以六旋翼植保无人飞机悬停下洗风场对雾滴运动规律的影响为为切入点,展开了试验及理论研究,得到了以下结论:
1)建立了SLK-5型六旋翼植保无人飞机在3 kg载荷时下洗风场的三维CFD计算模型,进行了非定常数值计算;展开风场方向风速测试试验,风速计算与测试的误差在9%以内,验证了下洗风场计算的可靠性。
2)采用激光粒度分析系统测试了离心雾化转杯在额定工作参数下雾滴粒径平均微分分布及有效喷幅;建立了该喷头含雾滴离散相的两相流模型并进行了非定常计算,通过喷幅测试验证了该模型对雾滴运动规律模拟的有效性;雾滴分布基本呈圆环形,浓度最高区为微分分布比例最大的中等粒径雾滴沉降区。
3)讨论了喷头相同工作条件下不同粒径雾滴(100、150、200、250、300、350m)的运动规律;粒径越小,喷幅越小;雾滴粒径越大,竖直方向最终分速度值越大。
4)针对六旋翼植保无人飞机,建立悬停喷雾条件下的两相流模型,通过非定常计算分析了粒径呈一定微分分布时雾滴的运动轨迹:雾滴群螺旋下降,喷头内侧雾滴群交织,外侧大雾滴水平行程更大,分布在下洗区外侧;“旋翼间干扰”强烈,雾滴主要分布在“旋翼间干扰”明显的3个“引入区”、3个“导出区”,而能运动到离喷头最远“引入区”的大粒径雾滴量少。
5)研究了不同粒径均匀雾滴在悬停下洗风场下的运动规律。分析表明,当粒径小于200m时,雾滴运动范围无法覆盖全部的“引入区”,雾滴多分布在下洗中心区;当雾滴粒径大于250m时,雾滴运动区域逐渐覆盖所有“引入区”、“导出区”。
本文可为后期多旋翼植保无人飞机飞行状态下耦合风场对雾滴漂移、运动及沉积研究提供参考。
致谢:感谢西安韦德沃德航空科技有限公司的鼎力支持。
[1] 薛新宇,高崇义,傅锡敏,等. 高效宽幅远射程组合喷枪的设计研究[J]. 农业工程学报,2001,17(4):70-74.
Xue Xinyu, Gao Chongyi, Fu Xinmin, et al. R & D of high-efficiency, wide-coverage and long-range combined spray gun[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2001, 17(4): 70-74. (in Chinese with English abstract)
[2] 刘伟,汪小旵,丁为民,等. 背负式喷雾器变量喷雾控制系统设计与特性分析[J]. 农业工程学报,2012,28(9):16-21.
Liu Wei, Wang Xiaochan, Ding Weimin, et al. Design and characteristics analysis of variable spraying control system for knapsack sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(9): 16-21. (in Chinese with English abstract)
[3] 张铁. 超高地隙喷杆喷雾机风幕系统试验研究与仿真分析[D]. 北京:中国农业机械化科学研究院,2012.
Zhang Tie. Experimental Study and CFD Simulation of Air-assisted System on Super-high Clearance Boom Sprayer [D]. Beijing: Chinese Academy of Agricultural Mechanization Sciences, 2012. (in Chinese with English abstract)
[4] 张东彦,兰玉彬,陈立平,等. 中国农业航空施药技术研究进展与展望[J]. 农业机械学报,2014,45(10):53-59.
Zhang Dongyan, Lan Yubin, Chen Liping et al. Current status and future trends of agricultural aerial spraying technology in China[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 45(10): 53-59. (in Chinese with English abstract)
[5] Xue Xinyu, Tu Kang, Qin Weicai, et al. Drift and deposition of ultra-low altitude and low volume application in paddy field[J]. International Journal of Agricultural and Biological Engineering, 2014(7): 23-28.
[6] Bradley K F. Role of atmospheric stability in drift and deposition of aerially applied sprays-preliminary results[J]. ASAE, 2004, 58(9): 742-755.
[7] Ivan W K, Bradley K F. Aerial methods for increasing spray deposits on wheat heads[J]. ASAE, 2004, 58(9): 716-729.
[8] 薛新宇,兰玉彬. 美国农业航空技术现状和发展趋势分析[J]. 农业机械学报,2012,44(5):194-201.
Xue Xinyu, Lan Yubin. Agricultural aviation application in USA[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 44(5): 194-201. (in Chinese with English abstract)
[9] Kirk W, Teske M E, Thistle H W. What about upwind buffer zones for aerial applications?[J] Journal of Agricultural Safety and Health, 2002, 8(3): 333-336.
[10] Dumbauld R K, Bjorklund J R, Saterlie S F. Computer models for predicting aircraft spray dispersion and deposition above and within forest canopies: User’s manual for the FSCBG computer program Report No 80-11[R]. USDA Forest Service, Davis, CA, 1980.
[11] Teske M E, Thistle H W, Schou W C, et al. A review of computer models for pesticide deposition prediction[J]. Transactions of the Asabe, 2011, 54(3): 789-801.
[12] Alan J B, Milton E T, John W B. AGDISP: The aircraft spray dispersion model, code development and experimental validation[J]. Transactions of the Asabe, 1989, 32(1): 327-334.
[13] Milton E T, Sandra L B, David M E, et al. AgDRIFT: A model for estimating near-field spray drift from aerial applications[J]. Environmental Toxicology and Chemistry, 2002, 21(3): 659-671.
[14] Milton E T, Sandra L B, David M E. AgDRIFT: An update of the aerial spray model AGDISP[J]. Environmental Toxicology and Chemistry, 2001, 21(2001): 659-671.
[15] Hewitt A J. Spray drift: Impact of requirements to protect the environment[J]. Crop Protection, 2000, 19(8): 623-627.
[16] Andrew J, Hewit T, David R,et al. Development of the spray drift task force database for aerial applications[J]. Environmental Toxicology and Chemistry, 2002, 21(3): 648-658.
[17] 汪沛,胡炼,周志艳,等. 无人油动力直升机用于水稻制种辅助授粉的田间风场测量[J].农业工程学报,2013,29(3):54-61.
Wang Pei, Hu Lian, Zhou Zhiyan, et al. Wind field measurement for supplementary pollination in hybrid rice breeding using unmanned gasoline engine single-rotor helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2013, 29(3): 54-61. (in Chinese with English abstract)
[18] 胡炼,周志艳,罗锡文,等. 无人直升机风场无线传感器网络测量系统设计与试验[J]. 农业机械学报,2014,45(5):221-226.
Hu Lian, Zhou Zhiyan, Luo Xiwen, et al. Development and experiment of a wireless wind speed sensor network measurement system for unmanned helicopter [J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 45(5): 221-226. (in Chinese with English abstract)
[19] 李继宇,周志艳,兰玉彬,等. 旋翼式无人机授粉作业冠层风场分布规律[J]. 农业工程学报,2015,31(3):77-86.
Li Jiyu, Zhou Zhiyan, Lan Yubin, et al. Distribution of canopy wind field produced by rotor unmanned aerial vehicle pollination operation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 77-86. (in Chinese with English abstract)
[20] Qin Wecai, Qiu Baijing, Xue Xinyu, et al. Droplet deposition and control effect of insecticides sprayed with an unmanned aerial vehicle against plant hoppers[J]. Crop Protection, 2016, 85: 79-88.
[21] 邱白晶,王立伟,蔡东林,等. 无人直升机飞行高度与速度对喷雾沉积分布的影响[J]. 农业工程学报,2013,29(24):25-32.
Qiu Baijing, Wang Liwei, Cai Donglin, et al. Effects of flight altitude and speed of unmanned helicopter on spray deposition uniform[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2013, 29(24): 25-32. (in Chinese with English abstract)
[22] 陈盛德,兰玉彬,李继宇,等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报,2016,32(17):40-46.
Chen Shengde, Lan Yubin, Li Jiyu, et al. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 40-46. (in Chinese with English abstract)
[23] 杨风波,马大为,任杰,等. 新型同心筒自力发射热环境优化设计[J]. 固体火箭技术,2015,38(2):172-178.
Yang Fengbo, Ma Dawei, Ren Jie, et al. Optimization design for thermal environment of a new roadbed concentric canister launcher[J]. Journal of Solid Rocket Technology, 2015, 38(2): 172-178. (in Chinese with English abstract)
[24] 杨风波,马大为,薛新宇,等. 新型路基同心筒热冲击机理与热环境影响因子[J]. 爆炸与冲击,2016,36(2):153-160.
Yang Fengbo, Ma Dawei, Xue Xinyu, et al. Study on thermal shock mechanism and thermal environment effecting factors of a new concentric canister launcher[J]. Explosion and Shock Waves, 2016, 36(2): 153-160. (in Chinese with English abstract)
[25] 刘永丰,明平剑,张文平,等. 内燃机三维CFD数值模拟程序开发[J]. 工程热物理学报,2013,34(10):1944-1947.
Liu Yongfeng, Ming Pingjian, Zhang Wenping, et al. Study on thermal shock mechanism and thermal environment effecting factors of a new concentric canister launcher[J]. Journal of Engineering Thermophysics, 2013, 34(10): 1944-1947. (in Chinese with English abstract)
[26] 黄永辉. 基于CFD的汽车外流场数值模拟及车身造型优化[D]. 长沙:湖南大学,2012.
Huang Yonghui. Numerical Simulation and Model Optimization For Car body Base on CFD[D]. Changsha: Hunan University, 2012. (in Chinese with English abstract)
[27] Duga A T, Dekeyser D, Ruysen K, et al. Nuyttens. allenges for CFD modeling of drift from air assisted orchard sprayers[C]// 13th Workshop on Spray Application Techniques in Fruit Growing, 2015: 34-35.
[28] Melese E A, Debaer C, Rutten N. A new integrated CFD modelling approach towards air-assisted orchard spraying. Part I. Model development and effect of wind speed and direction on sprayer airflow[J]. Computers and Electronics in Agriculture, 2010, 71(1): 128-136.
[29] 张宋超,薛新宇,秦维彩,等. N-3型农用无人直升机航空施药漂移模拟与试验[J]. 农业工程学报,2015,31(3):87-93.
Zhang Songchao, Xue Xinyu, Qin Weicai, et al. Simulation and experimental verification of aerial spraying drift on N-3 unmanned spraying helicopter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(3): 87-93. (in Chinese with English abstract)
[30] Roberts T W, Murman E M. Solution method for a hovering helicopter rotor using the Euler equations[R]. AIAA 85-0436, 1985.
[31] 王福军. 计算流体动力学分析: CFD软件原理与应用[M]. 北京:清华大学出版社,2004:113-142.
[32] 牛钰森. 自弹式发射内弹道流场特性研究[D]. 北京:北京理工大学,2016.
Niu Yuseng. Research on Internal Ballistic Flow Filed Characteristics of Self-Eject Launch[D]. Beijing: Beijing Institute of Technology, 2016. (in Chinese with English abstract)
[33] Robert T W, Murman E M. Solution method for a hovering helicopter rotor using the euler equations[R]. AIAA 85-0436, 1985.
[34] Yang Fengbo, Xue Xinyu, Zhang Ling, et al. Numerical simulation and experimental verification on downwash air flow of six-rotor agricultural unmanned aerial vehicle in hover[J]. International Journal of Agricultural and Biological Engineering, 2017, 10(4): 41-53.
[35] 于冲,王旭,董福安,等.+值对翼型气动参数计算精度的影响研究[J]. 空军工程大学学报:自然科学版,2012,13(3):25-29.
Yu Chong, Wang Xu, Dong Fu’an, et al. The study of effect of+ on precision of pneumatic parameters of foil[J]. Journal of Air Force Engineering University: Natural Science Edition, 2012, 13(3): 25-29. (in Chinese with English abstract)
Effect of down wash airflow in hover on droplet motion law for multi-rotor unmanned plant protection machine
Yang Fengbo, Xue Xinyu※, Cai Chen, Zhou Qingqing
(210014,)
Recently, multi-rotor unmanned aerial vehicle (UAV) becomes more and more irreplaceable in the field of plant protection. Multi-rotor unmanned plant protection machine has been widely used in pesticide spraying, pollination operation, and so on, however, the unclearness of wind field distribution leads to non-uniform deposition problem. In this paper, the influence of the down wash flow on the motion distribution of droplet group was studied for the multi-rotor UAV in hovering state. Based on the N-S equation and realizable-turbulence model, the three-dimensional numerical model was established for six-rotor unmanned plant protection machine under 3 kg load condition. In the numerical calculation, 12 observation points were set at 2 heights directly below each rotor, and the wind velocity value at each point was observed. When the computing time reached 2.28 s, the wind velocity tended to be stable, and the 12 stable wind velocity pulsation values were obtained. The wind velocity of the down wash flow was tested one by one at the 12 observation points for the multi-rotor UAV in hovering state. Comparative analysis showed that the relative error of the velocity at thedirection between the experimental measurement and numerical simulation for characteristic points was less than 9% when the down wash flow was stable, and the reliability of the wind field numerical calculation was verified. Under the rotation of airfoil and the extrusion of the external atmospheric pressure, the “shrinkage-expansion-shrinkage” phenomenon appeared in the longitudinal main section; under the influence of wing interference caused by the opposite velocity of adjacent rotor, the turbulent effect of down wash flow was obvious, and the “airflow inlet” and “airflow outlet” region appeared between the wings area at the cross section. Droplet discrete phase was introduced to N-S equation, the momentum and energy equations were also corrected for continuous phase to establish two-phase flow model, then the two-phase flow model with droplet discrete phase was established for the nozzle, and the feasibility and validity of the two-phase flow model to calculate the trajectory of the droplets were also verified combined with the spray test. The advantages of easy boundary setting in numerical computation were used to discuss the influence law of droplet size on droplet motion for the atomization nozzle. Numerical results showed that the droplet distribution was basically circular, and the area of droplets with the highest concentration was the medium-sized droplet sedimentation area, which had the maximum differential ratio. Moreover, the numerical simulation results also showed that the smaller the droplet size, the smaller the droplet spray amplitude; the larger the droplet size of the droplet, the larger the final sub-velocity value at the vertical direction. Then the three-dimensional two-phase flow model was established for six-rotor unmanned plant protection machine, and the analysis showed that droplets were mainly distributed in the 3 “airflow inlet” areas and 3 “airflow outlet” areas where wing interference was obvious. The droplets in the inner side of down wash area were interlaced, and the horizontal travel of large particles was greater and they were distributed in the outside periphery of down wash area. When the diameter was less than 200 m, the droplet movement range could not cover all the “airflow inlet” area, and the droplets were mostly distributed in the center down wash area. When the diameter was greater than 250 m, the droplet motion region gradually covered all the “airflow inlet” and “airflow outlet”. The result can lay a foundation for the research of drifting and deposition of droplets under the disturbance of vertical wind flow, down wash flow and instantaneous transverse wind during the flight spraying.
unmanned aerial vehicle; spraying; models; downwash air flow; wind field test; discrete phase; motion law
10.11975/j.issn.1002-6819.2018.02.009
S494; O359
A
1002-6819(2018)-02-0064-10
2017-09-07
2017-11-06
国家重点研发计划项目(2017YFD0701000、2016YFD0200702);国家自然科学基金资助项目(51705264)
杨风波,助理研究员,博士后,主要从事精准施药技术研究。Email:yangfengbo.cool@163.com
薛新宇,研究员,主要从事植保与环境工程技术研究。 Email:735178312@qq.com
杨风波,薛新宇,蔡 晨,周晴晴. 多旋翼植保无人机悬停下洗气流对雾滴运动规律的影响[J]. 农业工程学报,2018,34(2):64-73. doi:10.11975/j.issn.1002-6819.2018.02.009 http://www.tcsae.org
Yang Fengbo, Xue Xinyu, Cai Chen, Zhou Qingqing. Effect of down wash airflow in hover on droplet motion law for multi-rotor unmanned plant protection machine[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(2): 64-73. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2018.02.009 http://www.tcsae.org
