历程图中的弱目标轨迹增强方法
2018-02-27陶剑锋
陶剑锋
(中国船舶重工集团公司第七一五研究所,310023,杭州)
水下探测是利用目标舰艇发出的噪声和目标舰上安装的主动式声纳发射的信号来探测目标,通常采用历程图对目标信号进行检测和跟踪,由于受海洋环境噪声及其他干扰的影响,在历程图上可能出现干扰,这些干扰影响了操作人员对目标(特别是弱目标)的正确检测和跟踪[1-2]。历程图是逐行显示的,需要采用特殊方法来处理,常用背景均衡及直方图增强等及其改进方法,这些算法虽然能改进历程图的总体视觉效果,可去除大范围起伏,依然不理想[3]。文献[4-10]提出的二维分割窗(two-pass split-window,TPSW)、排序截断平均(order truncate average,OTA)算法、波束域OTA算法、多级背景均衡等方法能改善方位历程图显示、目标检测和方位估计效果,但需要人工设置参数,一旦参数设置不合适,将会大大影响算法处理效果,增大了算法在实际应用中的难度。直方图均衡及其改进方法对弱目标增强有一定作用,同时也增强了强目标,导致了一些图像出现过度增强等退化现象[11-12],文献[13-18]提出了偏微分方程的直方图反均衡算法,多子动态的直方图均衡化算法、递归均值分割直方图均衡化、加权平均多峰直方图均衡化等算法,但由于算法是在损失一定的增强程度为代价来追求图像处理前后灰度均值的稳定性,同样效果不佳,会出现泛白发灰、不同程度的过度增强、对比度低等现象,对弱目标也起不到增强的效果。
针对上述不足,本文提出一种新图像检测算子与一维直方图分段均衡相结合的弱目标轨迹增强(NIDO-ODSHE)方法。该方法先利用新图像检测算子对波束输出数据进行垂直方向目标轨迹检测,然后对检测后的行数据进行分段直方图均衡增强处理,处理后的数据作为历程图的行数据输出。经处理后历程图较处理前历程图能获得较大处理增益,图像清晰度明显提高、弱目标轨迹增强显著,提高了弱目标的人工/自动检测能力。
1 方法原理
被动声纳探测的任务是在背景噪声中感知目标的存在,是后续处理的先决条件。被动声纳探测流程如图1所示。被动声纳方程反映了介质、声纳、被探测目标、声纳工作动态之间的量化关系,如下式所示
SL-NL-TL+GS+GT=DT
(1)
式中SL、NL、TL、GS、GT、DT分别表示声源级、背景噪声、传播损失、空间增益、时间增益、检测阈[19]。从式(1)可知,若要声纳更好地检测到目标,需要式(1)左边的值越大越好,这样检测到目标的概率越大。当SL、NL、TL不变,要使式(1)左边值变大,就需增大GS、GT的值。

图1 被动声纳探测流程图
图1中空间增益GS常指前置滤波、波束形成等算法所获取的增益,时间增益GT一般可分为2部分:一部分是信号处理算法中信号时间长度带来的增益;另一部分是方位历程带来的增益。历程图带来的时间增益主观性较强,不同操作人员对同一历程图中跟踪前的目标轨迹感知是不同的,但对同一人而言,其判断能力是不变的。如果对方位历程图做进一步的后置处理,显然,式(1)左边的值会增大。基于这种思考,在图1中黑虚框部分适当处理可获得更多增益,那么便会检测到更远或更弱的目标。本文在图1中P点处增加对方位历程图的后置处理来增强弱目标轨迹历程,获取更多处理增益。本文处理方法主要分为2个步骤:①利用提出的新图像处理算子对方位历程中多帧历史波束数据进行垂直方向目标轨迹检测,并作为当前帧波束数据输出;②利用提出的一维分段直方图均衡法对第一步输出结果进行一维图像实时增强处理。
1.1 新图像处理算子
图像边缘是图像最基本的特征之一,存在于目标与目标、目标与背景、区域与区域之间,是图像局部亮度变化最显著的地方,反映了图像局部特征的不连续性。图像边缘变化可用图像灰度分布的梯度来反映。对图像中的点f(x,y)的梯度可以定义一个二维列向量
(2)
式中,f(x,y)所对应的灰度值为
(3)
由式(2)、(3)可知,梯度的灰度值就是f(x,y)在其最大变化率方向上的单位距离所增加的量。实际计算时常用绝对值代替平方及平方根运算,梯度的灰度值可近似为
R[f(x,y)]=|Gx|+|Gy|
(4)
对数字图像而言,式(4)中的导数可以用差分来近似,这样Gx和Gy的一阶水平垂直差分和交叉差分近似分别如下式所示
(5)
(6)
常用边缘检测Sobel、Prewitt等一般按照式(5)、式(6)利用局部图像微分技术获得图像的边缘。
声纳方位历程图是随着时间推移而形成的二维图像,数据是逐行累积的,比单帧波束输出在时域上更具有累积效应,可供利用的信息量更大。在实际使用过程中,操作人员一般先通过方位历程图粗略判断弱目标的大致方位,再对波束能量输出进行放大后跟踪,这种操作不仅繁琐,而且会因数据动态范围频繁变化导致方位历程图灰度跳变大。为避免上述缺点,可利用图像处理的方法对当前帧及少量历史帧的波束数据进行轨迹检测处理。历程图中目标轨迹基本是沿垂直方向,干扰/噪声没有规律,轨迹线是比较宽的(波束有一定宽度)。具有这样特点的低对比度图像中的目标大部分区域已成为边缘的过渡区域,且目标边缘的梯度幅值较小。若采用传统检测算子处理,不仅效果不理想,而且处理后的同一目标轨迹线会变成多条轨迹,因此传统检测算子不适于这类图像的处理。本文提出一种新的图像算子,该算子不仅可剔除干扰背景、抑制横向线,而且能在垂直方向准确检测提取目标轨迹。新算子保持点(x,y)像素值不变,在该点左右按照式(5)边缘检测原理进行一阶差分检测,这样不仅能保持目标轨迹宽度,而且能检测该点附近更多的细节信息,一维算子形式为[-1,1,1,1,-1];同时,为了削弱其横向边缘检测能力,采用n×n二维算子形式。考虑梯度定义、目标轨迹特点及计算量等因素,提出一种5×5的新边缘检测算子,如图2所示。

图2 新检测算子
1.2 一维分段直方图均衡
灰度图像对比度不明显的主要原因是灰度值分布不合理,当一幅图像的大部分区域都很亮或大部分区域都很暗时,该图像的对比度低;当一幅图像较亮的部分和较暗的部分所占比重相当时,该图像的对比度高;当图像灰度分布较均匀时,图像细节清楚。直方图均衡是一种比较有效的图像增强方法,是把原始图像的直方图通过变换函数变换为均匀分布的形式,增强了图像整体对比度的效果,图像看起来更清晰[20]。直方图均衡是对二维数字图像进行处理,处理过程中对图像所有像素值进行统计,按照变换函数进行均衡。假设图像灰度级为[0,L-1],则该图像的直方图可表示为
p(xk)=nk/(mn)
(7)
式中,xk表示第k级灰度值(0≤k≤L-1);nk表示第k级灰度值的像素的个数;m、n表示图像的行数和列数;p(xk)表示第k级灰度值在图像的频数,所有分量的和等于1。称式(7)为归一化的直方图,要用直方图均衡方法处理一幅图像,首先要定义一个变换函数,若图像像素与像素之间的灰度值是连续的,则p(xk)可以看成灰度值xk(随即变量)的概率密度函数,将其记为p(x)。
定义变换函数如下
y=T(x),0≤k≤l-1
(8)
式中:x为输入灰度值;y为输出灰度值,且为一一对应关系。该函数需要满足下面2个条件:
(1)T(x)在区间[0,l-1]是一个严格单调递增函数;
(2)在区间[0,l-1]上,函数T(x)的值域也为[0,l-1]。
在图像处理中,常用下面的函数形式

(9)
式(9)的右边为x的累计分布函数,则有
(l-1)px(x)
(10)
式中:ω为积分虚变量。
已知p(x),则可以得到输出灰度值y的概率密度函数为
(11)
由式(11)可得
(12)
数字图像的各个像素都是离散的,把上述方程转化为离散形式
(13)
实际上,累计分布式函数就是原始图像的累积直方图,这样积累后的像素灰度值为
k=0,1,2,…,l-1
(14)
通过式(14),可计算出直方图均衡化后像素的灰度值,实际中还要对tk取整,其逆变换可写成
xk=T-1(tk), 0≤tk≤l-1
(15)
按照上述原理对图像进行增强处理一般能取得较好效果,但方位历程图是逐行显示的图像,严格意义上讲,不是二维数字图像,且动态范围大,导致弱目标被掩盖,采用上述直方图均衡方法会出现均衡后细节不突出、最大像素值过大而导致失真等现象。针对这些缺点,采用只对一维波束输出数据进行分段直方图均衡处理方法,通过分段均衡能较好保护弱目标的像素值,抑制强目标的像素值,使像素值分布均匀,对比度合理,其过程如下:对经过新检测算子处理后的行数据求均值,对大于和小于均值的数据按照式(7)~(15)分别处理,再合并分段处理后的数据形成新的均衡数据,作为本行输出数据。
1.3 算法实现
文中1.1节和1.2节分别介绍了新图像算子、分段直方图均衡及处理流程,下面依据算法公式及处理流程给出本文方法的具体实现步骤。
假设波束输出为f(xi,t),i=1,…,n,t=1,2,…,T,i,t分别表示点数和时刻,本文方法的处理步骤如下:
(1)若t<4,重复取当前行数据构成5行数据,即f(xi,t),f(xi,t),f(xi,t),f(xi,t),f(xi,t),用图2算子对上述5行n列数据进行卷积处理;
(2)若t>4,取当前行数与前4行数据构成5行数据,即f(xi,t-4),f(xi,t-3),f(xi,t-2),f(xi,t-1),f(xi,t),用图2算子对上述5行n列数据进行卷积处理,同步骤(1);
(3)求本行数据灰度级均值μ;
(4)列出变换前后本行像素灰度级i,k=0,1,2,…,l-1;
(5)统计本行数据小于均值μ的各灰度级像素个数ni;
(6)计算小于均值的像素的直方图p1(i)=ni/n1;
(8)利用灰度变换函数计算变换后的灰度值并取整,j=int[(L-1)Pj];
(9)确定灰度变换关系i→j,据此将原像素灰度值修正为f′(x)=i→g(x)=j;
(10)统计变换后灰度级的像素个数nj;
(11)计算变换后的数据直方图p1(i)=ni/n1;
(12)按照步骤(3)~(11)统计计算大于均值μ的像素的直方图并变换;
(13)合并变换后的直方图P(i)=P1∧P2。
方位历程图像经过上述步骤处理后,历程图像细节更为丰富,弱目标轨迹增强,目标轨迹更清晰,易于目标检测。
2 数据处理
经仿真、试验数据处理分析,处理后的弱目标增强效果明显,历程图清晰度有较大提高。本文采用均方误差和4邻域清晰度指数法2种图像质量评价方法来评价处理前后图像质量。假设m×n维图像评价前后点(x,y)像素值分别为f(x,y)和g(x,y),上述评价方法的计算公式如下。
(1)均方误差为
(16)
(2)四邻域清晰度为
f(x,y-1)-f(x+1,y)-f(x,y+1)]2
(17)
均方误差越小、清晰度指数越大,表明图像灰度跨度越大,图像越清晰,质量较好;相反,则表明图像清晰度不够,质量较差。
2.1 仿真数据
本文仿真了128阵元线阵数据的方位历程图,其中,目标A方位从58.28°~80.69°,距离从1.43~4.79 km,目标B方位从105.3°~115.59°,距离从4.24~3.85 km;目标运动400 s。处理结果如图3所示。

(a)原方位历程图

(b)HE方法处理后方位历程图

(c)本文方法处理后方位历程图图3 仿真数据处理结果
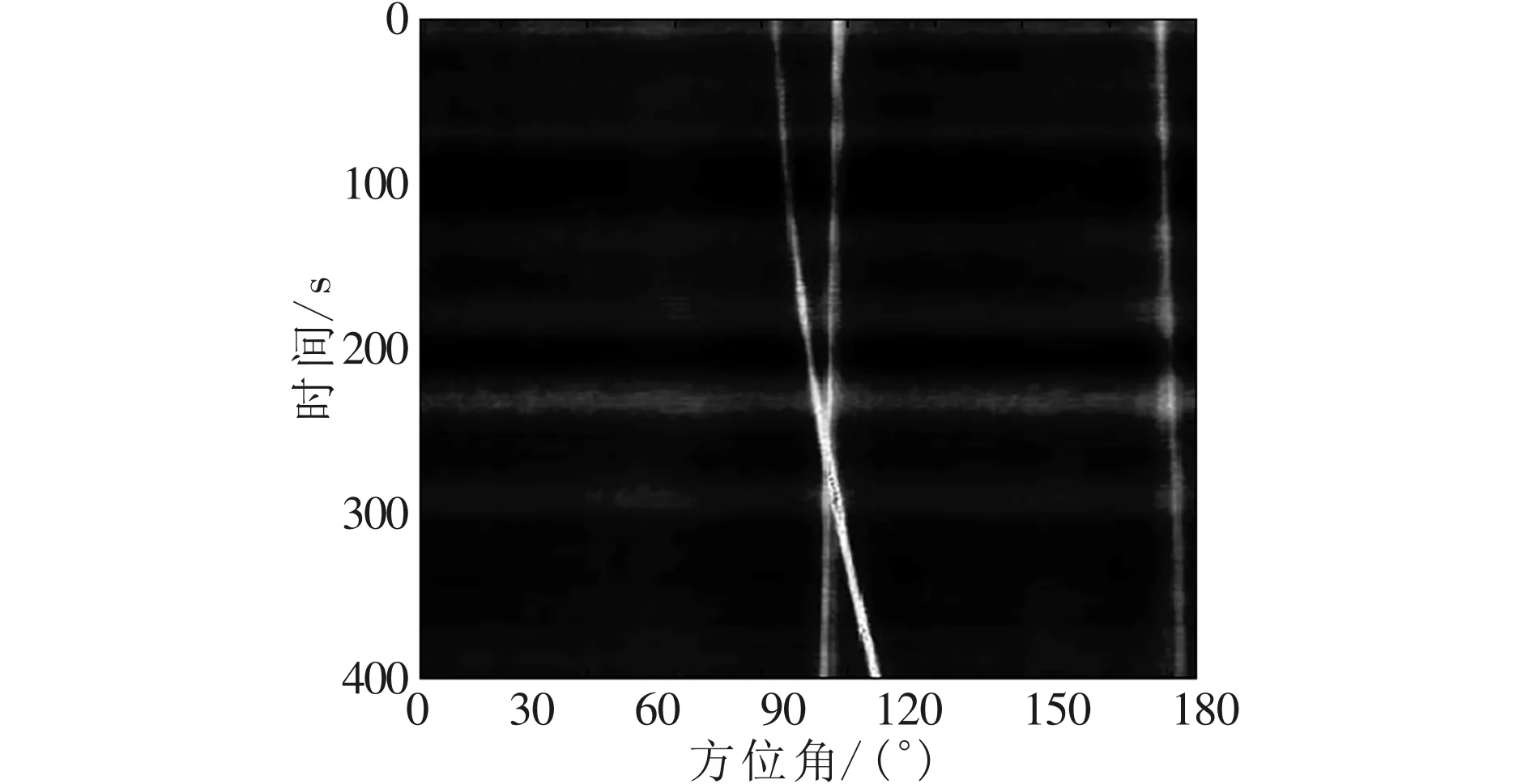
对图3中a、b、c 3幅图像进行评价分析,结果如表1所示。从图3和表1可以看出,经本文方法处理后的图3c明显优于图3a和3b,且抑制横向线明显,图3c中T标识为增强后的弱目标B,轨迹明显。

表1 仿真图像处理前后的均方误差、4邻域 清晰度指数对比
2.2 试验数据
在东海某海域,利用长线声阵采集了不同时段、不同海况下的阵列信号数据,本文选取2组组时长400帧不同信噪比、不同目标个数的代表性数据进行处理分析。
(1)信噪比较高数据处理结果如图4所示。
(a)原方位历程图

(b)HE方法处理后方位历程图

(c)本文方法处理后方位历程图图4 信噪比较高试验数据处理结果
对图4中a、b、c 3幅图像进行评价分析,结果如表2所示。从图4和表2可以看出,经本文方法处理后的图4c明显优于图4a和4b,且抑制横向线明显,目标轨迹明显。
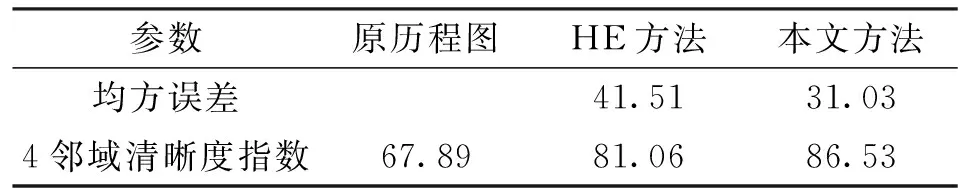
表2 信噪比较高试验数据图像处理前后的 均方误差、4邻域清晰度指数对比
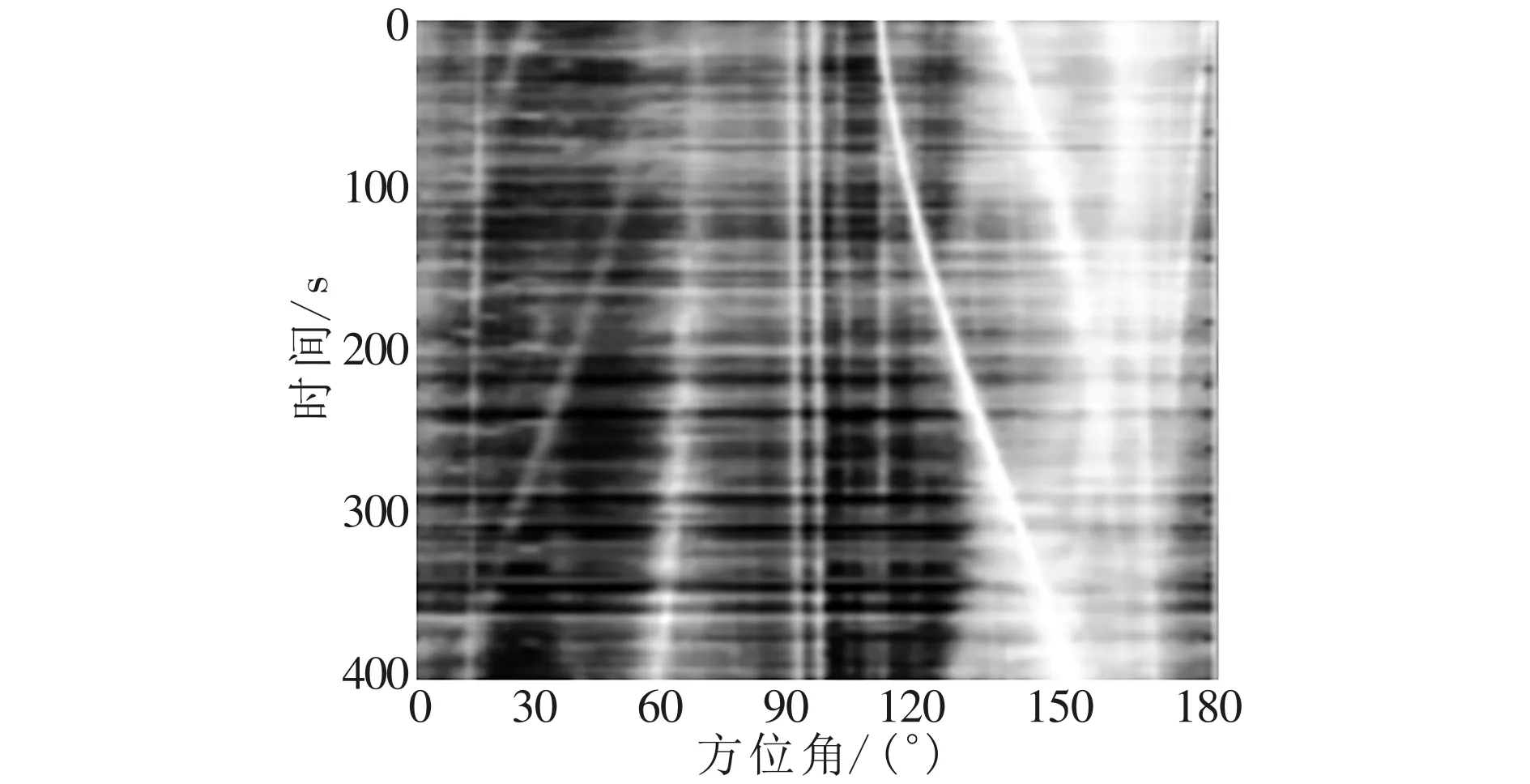
(2)弱目标较多数据处理结果如图5所示。
对图5中a、b、c 3幅图像进行评价分析,结果如表3所示。从图5和表3可以看出,经本文方法处理后的图5c明显优于图5a和5b,能检测到图5a不能看到的多个弱目标,增强后历程图细节明显,图5c中T标识为增强后部分弱目标。表3为弱目标较多的数据图像处理前后的均方误差、4邻域清晰度指数对比。由表3可见,人眼对历程图视觉反应常常用清晰度和均方误差来进行衡量,清晰度值越大表示越清晰,均方误差越小表示越干净。对上述仿真和试验数据不同情况进行不同方法处理前后的均方误差比和4邻域清晰度指数比进行统计,结果如表4所示。由表4可见,用本文方法处理后的图像均方误差比用HE方法处理的提高了12%以上,图像清晰度提高了6%以上。

(a)原方位历程图
(b)HE方法处理后的方位历程图

(c)本文方法处理后的方位历程图图5 2种方法对弱目标较多的数据处理结果比较

参数原历程图HE方法本文方法均方误差40.6636.224邻域清晰度指数85.9488.2394.61
3 结 语
历程图是人机交互的重要界面,因此历程图发挥着极其重要的作用。实际使用中,由于环境噪声及干扰使得弱目标信号在历程图显示不明显甚至完

表4 HE方法与本文方法处理后的均方误差比 和4邻域清晰度指数比
全显示不出来,影响操作人员对目标的正确检测和跟踪。本文通过图像处理方法来提高历程图的清晰度,提出基于历程图的新图像算子和一维分段直方图均衡相结合的处理方法,能很好地检测到历程图中强弱目标轨迹,抑制横向线,增强了弱目标轨迹,使像素值分布均匀,效果明显。仿真和试验数据处理表明图像清晰图提高明显,弱目标增强显著。本文方法无需参数设置,计算量小,适用于输出信噪比高或低,目标多或少等各种方位历程图的处理。
[1] RICHARD O. Nielson sonar signal processing [M]. Boston, USA: Artech House, 1999: 231-257.
[2] 袁延艺, 蒋小勇. 多级背景均衡在多波束Lofar处理中的应 [J]. 声学技术, 2012, 31(3): 300-303. YUAN Yanyi, JIANG Xiaoyong. Noise normalization technique in LOFAR processing [J]. Technical Acoustics, 2012, 31(3): 300-303.
[3] 李启虎, 潘学宝, 尹力. 数字式声纳中一种新的背景均衡算法 [J]. 声学学报, 2000, 25(1): 5-9. LI Qihu, PAN Xuebao, YIN Li. A new algorithm of background equalization [J]. Acta Acustica, 2000, 25(1): 5-9.
[4] 王晓宇, 杨益新. 一种新的宽带声呐波束域背景均衡方法 [J]. 船海工程, 2009, 38(5): 181-185. WANG Xiaoyu, YANG Yixing. A new background equalization algorithm in beamspace of broadband sonar [J]. Ship & Ocean Engineering, 2009, 38(5): 181-185.
[5] BRUNO M S, MOURA J F. Multi frame detector tracker: optimal performance [J]. IEEE Transactions on Aerospace and Electronic Systems, 2001, 37(3): 925-945.
[6] TZANANNES A P, Brooks D H. Detecting small moving objects using temporal hypothesis testing [J]. IEEE Transactions on Aerospace and Electronic Systems, 2002, 38(2): 570-585.
[7] REED I S, GAGLIARDI R M, STOTTS L. Optical moving target detection with 3-D matched filtering [J]. IEEE Transactions on Aerospace and Electronic Systems, 1988, 24(4): 327-335.
[8] CAPRARO C T, CAPRARO R T. WICKS M C. Knowledge aided detection and tracking [C]∥Proceedings of IEEE National Radar Conference. Piscataway, NJ, USA: IEEE, 2007: 352-356.
[9] EHRMAN L M, BLARIR W D, Using target RCS when tracking multiple Rayleigh targets [J]. IEEE Transactions on Aerospace and Electronic Systems, 2010, 46(2): 701-716.
[10]GROSSI E, L OPS M, VENTURINO L. Track-before-detect for multi-frame detection with censored observations [J]. IEEE Transactions on Aerospace and Electronic Systems, 2014, 50(3): 2032-2046.
[11]RAO Bin, ZONG Zhiwei, NIE Yuanping. Track before detect of weak ballistic target using elliptical Hough transform [C]∥Proceedings of IET International Radar Conference. Piscataway, NJ, USA: IEEE, 2013: 345-351.
[12]CELIK T. Two-dimensional histogram equalization and contrast enhancement [J]. Pattern Recognition, 2012, 45(10): 3810-3824.
[13]陈洪, 张延鑫, 朱祥玲. 一种基于背景抑制的星空图像增强方法 [J]. 解放军理工大学学报(自然科学版), 2015, 16(2): 109-113. CHEN Hong, ZHANG Yanxin, ZHU Xiangling. Star map enhancement method based on background suppression [J]. Journal of PLA University of Science and Technology (Natural Science Edition), 2015, 16(2): 109-113.
[14]郑恩明, 张恩宾, 孙长瑜. 一种基于重置协方差矩阵的波束形成优化方法 [J]. 振动与冲击, 2015, 34(17): 185-190. ZHENG Enming, ZHANG Enbin, SUN Changyu. An optimization approach for beam forming based on reset covariance matrix [J]. Journal of vibration and shock, 2015, 34(17): 185-190.
[15]STRUZINSKI W A, LOWE E D. A performance comparison of four noise background normalization schemes proposed for signal detection systems [J]. Journal of Acoustical Society of America, 1984, 76(6): 1738-1742.
[16]SHAPIRO J H, GREEN T J. Performance of split window multipass-mean noise spectral estimations [J]. IEEE Transactions on Aerospace and Electronic Systems, 2000, 36(4): 1360-1370.
[17]SUOJOKI T, TABUS I. A novel efficient normalization technique for sonar detection [C]∥Proceedings of the 2002 International Symposium on Underwater Technology. Tokyo, Japan: Society for Underwater Technology, 2002: 296-301.
[18]ARBONE C P, KAY S M. A novel normalization algorithm based on the three dimensional minimum variance spectral estimator [J]. IEEE Transactions on Aerospace and Electronic Systems, 2012, 48(1): 430-448.
[19]李启虎. 数字式声纳设计原理 [M]. 合肥: 安徽教育出版社, 2002: 127-133.
[20]章毓晋. 图像分割 [M]. 北京: 科学出版社, 2001: 9-54.
