基于LQG的混合电磁悬架阻尼-刚度设计及试验研究
2018-02-27汪若尘钱禹辰丁仁凯孟祥鹏
汪若尘, 钱禹辰, 丁仁凯, 孟祥鹏, 谢 健
(江苏大学 汽车与交通工程学院,江苏 镇江 212013)
主动悬架中包含有源作动器和弹簧,通过作动器提供的作动力和弹簧力来进行隔振,作动器作动力的大小、方向由控制器通过特定的控制策略计算得到。兰波等[1-2]设计了一种滚珠丝杠结合无刷电机的作动器,用于主动悬架,并采用LQG(Linear-Quadratic Gussian)控制策略进行了仿真与试验研究。Wang等[3]针对应用于主动悬架的永磁直线电机进行了研究与设计,提高了永磁直线电机的推力密度,来适应主动悬架的需要。唐诗晨等[4-6]在对可调阻尼减振器进行试验的基础下,研究了基于多模式切换的主动悬架,并对运用直线电机式主动悬架的整车模型进行了仿真研究。
上述研究表明,主动悬架能有效改善汽车悬架的动力学性能。但需要指出的是,主动悬架存在造价高、消耗能量大的缺陷,使得主动悬架的应用受到限制。同时,全主动悬架无液压阻尼器,故当悬架中的电磁作动器出现故障时,悬架系统将无法正常工作,即不具备Fail-safe特性。针对主动悬架能耗大、可靠性差的问题,学者们进行了相关的研究。Nakano等[7-8]研究了自供能式的主动悬架,在电机作为等效阻尼器在悬架中作用时,充当发电机将振动能量转化为电能储存在能源储存装置中,以提供其主动控制时所需的能量。来飞等[9-10]研究了直线电机式主动悬架及其控制策略,并对其加入了能量管理单元以减少主动悬架能量的消耗。Ebrahimi等[11]提出了一种应用在主动悬架上的混合式电磁减振器,并对此电磁减振器进行了设计并且试验,试验证明能有效减少主动悬架的能量消耗。Gysen等[12-13]将主动悬架上的直线电机与弹簧进行了集成设计,并提出涡流阻尼可作为被动阻尼运用于悬架系统中,并在实车上进行了试验。
混合电磁悬架在主动悬架的基础上与弹簧、作动器并联安装减振器,但是目前对于混合电磁悬架减振器阻尼系数和弹簧刚度的取值都未给出理论根据。基于上述问题,本文提出一种基于LQG控制的混合电磁悬架,以可靠性为基本前提,以提高动力学性能和降低能量消耗为主要目标,研究不同工作模式(平顺模式、运动模式和综合模式)下弹簧刚度、减振器阻尼系数对于悬架动力学性能和能量消耗的影响,从而选取各模式下的弹簧刚度和减振器阻尼系数。
1 悬架动力学模型
混合电磁悬架四分之一二自由度悬架拓扑模型如图1所示,图中mb为簧载质量,mw为非簧载质量,kt为轮胎刚度,ks为悬架弹簧刚度,Cs为可调阻尼减振器阻尼系数,Fact为直线电机作动力,Z0、Zw、Zb分别为路面输入位移、非簧载质量位移以及簧载质量位移。
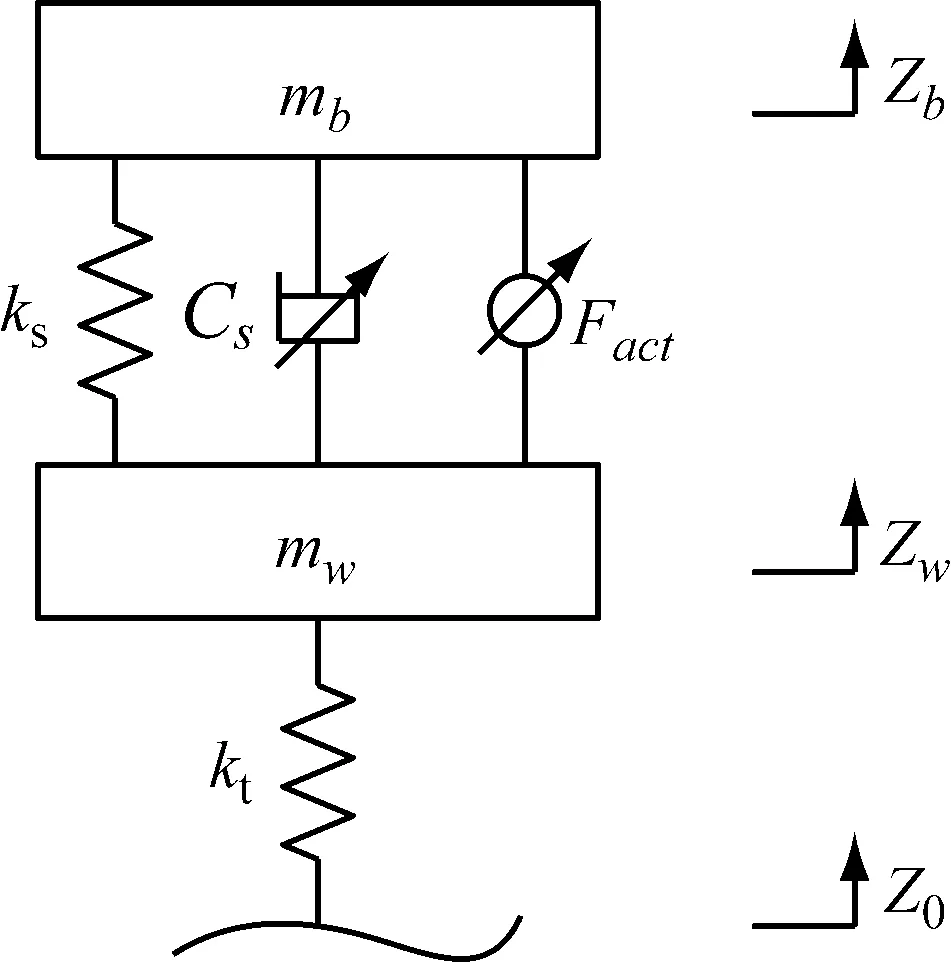
图1 系统模型
由牛顿第二定律可知悬架运动微分方程为
(1)
该动力学模型中路面模型参考
(2)
仿真参数如表1所示。

表1 仿真参数
本文设定混合电磁悬架具有三种工作模式:平顺模式、运动模式、综合模式,其中,平顺模式以车身加速度为主要指标,运动模式以轮胎动载荷为主要指标,综合模式兼顾两者,模式选择由人为控制。进行模式切换时,通过步进电机来改变液压可调阻尼减振器的单向阀的出油口横截面积,从而改变减振器的阻尼系数。控制系统示意图如图2所示。
混合电磁悬架各模式下均采用LQG控制策略,通过不同的加权系数来实现不同模式下车辆动力学性能的提高。LQG控制策略性能指标函数为
(3)
式中:q1、q2、q3分别为轮胎动位移、悬架动行程、车身加速度的加权系数。经过反复调试[14-15],不同模式下q1、q2、q3的赋值如表2所示。
2 弹簧刚度ks、被动阻尼Cs的选取
2.1 ks、Cs对悬架动力学性能的影响
在给定LQG加权系数的条件下,车身加速度与轮胎动载荷的均方根值随弹簧刚度和减振器阻尼系数的变化的仿真结果如图3所示。

(a)
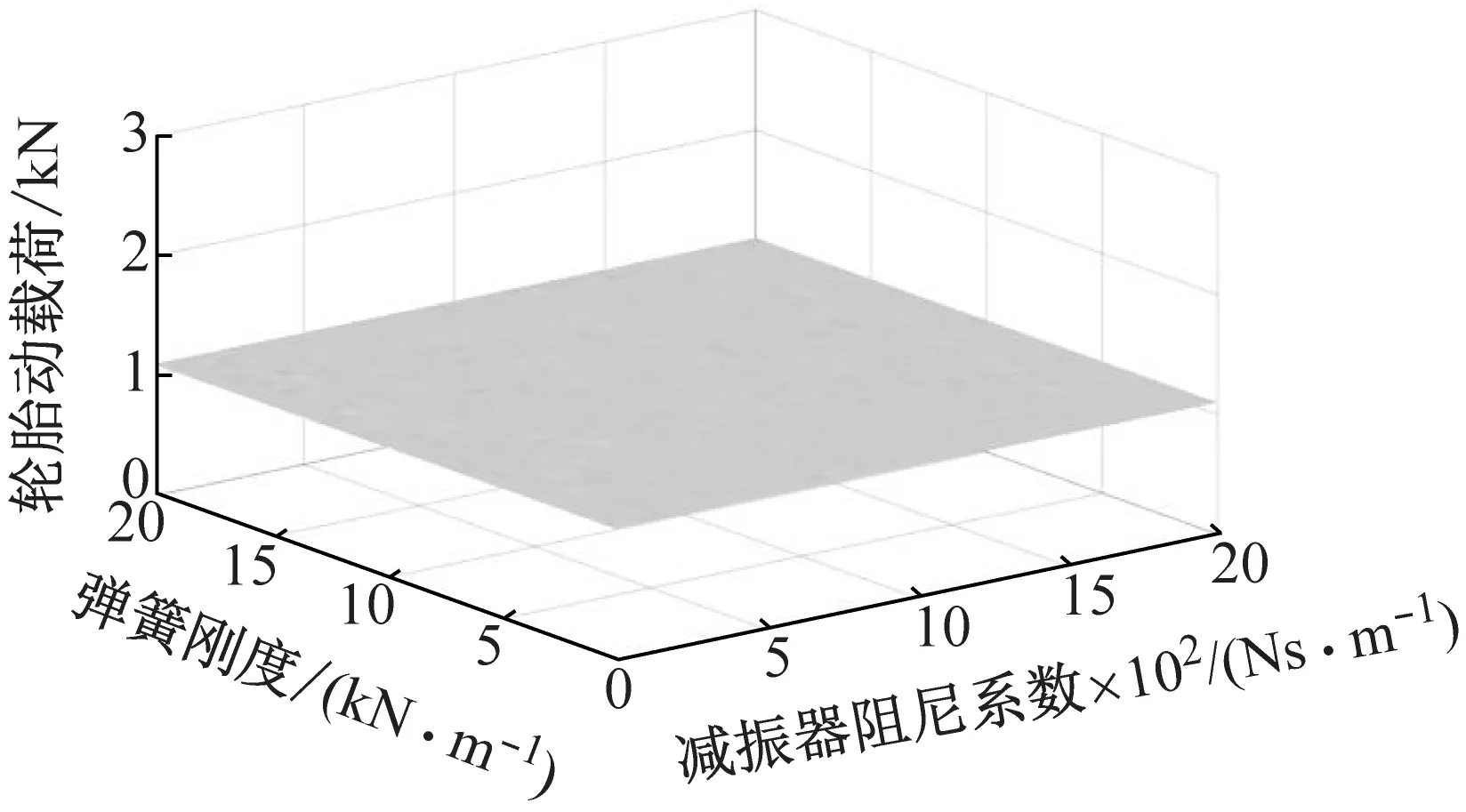
(b)
Fig.3 Effect ofksandCson suspension dynamic performance
从图中可以看出,悬架的动力学性能并不随悬架参数变换而呈趋势性变化。所以,在LQG控制下的混合电磁悬架的弹簧刚度ks、减振器阻尼系数Cs对悬架动力学性能没有影响。原因在于,当改变弹簧刚度ks和减振器阻尼系数Cs时,LQG控制策略下的电机输出力Fact也会改变,从而改变悬架合力∑F,来使悬架性能满足目标要求。
2.2 ks、Cs对悬架能耗特性的影响
以直线电机的输出功率Pa作为衡量混合电磁悬架能耗特性的性能指标
(4)
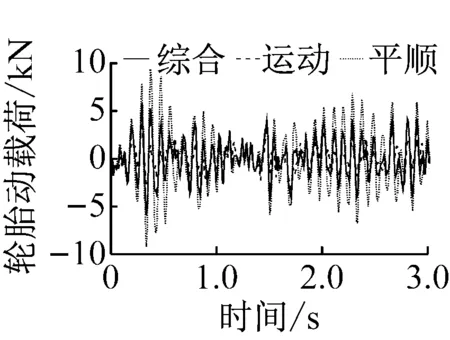
如图4所示,在三种模式下,直线电机输出功率Pa的均方根值随ks、Cs发生变化。其中,Cs对Pa的影响较大,而ks对Pa的影响较小,在运动模式下,ks对Pa基本没有影响。这是由于悬架弹簧是作为一个储能元件在悬架中工作,所以对于悬架的能耗特性影响较小,而被动可调阻尼器是作为一个耗能元件在悬架中工作,振动能量通过被动阻尼器转化为热能消耗掉,所以影响较大。
当Cs过小时,被动阻尼器所提供的阻尼力过小,所以需要直线电机额外来提供作动力来补偿这一部分欠缺的阻尼力;当Cs过大时,阻尼力过大,这时候也需要直线电机额外提供作动力来抵消这一部分溢出的阻尼力。所以,呈现出Pa随Cs的增大先减小后增大的图形。
由于本文所研究的混合电磁悬架不涉及可变刚度弹簧,在三种模式下的弹簧刚度ks均为同一个值,同时考虑到悬架弹簧刚度过小会影响悬架的静支撑,所以最终混合电磁悬架的弹簧刚度、可调减振器阻尼系数选取如表3所示。

(a) 综合模式
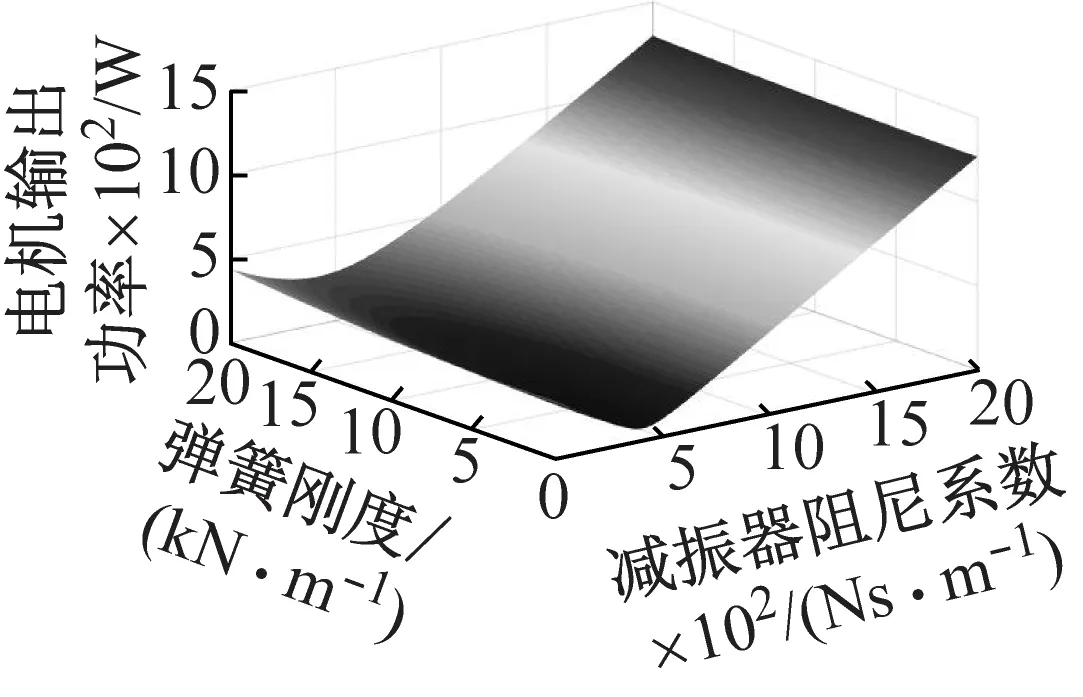
(b) 平顺模式

(c) 运动模式
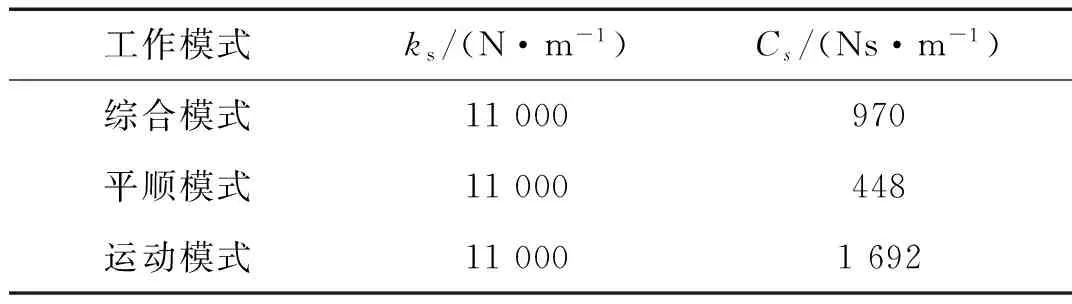
表3 各模式下ks、Cs的取值
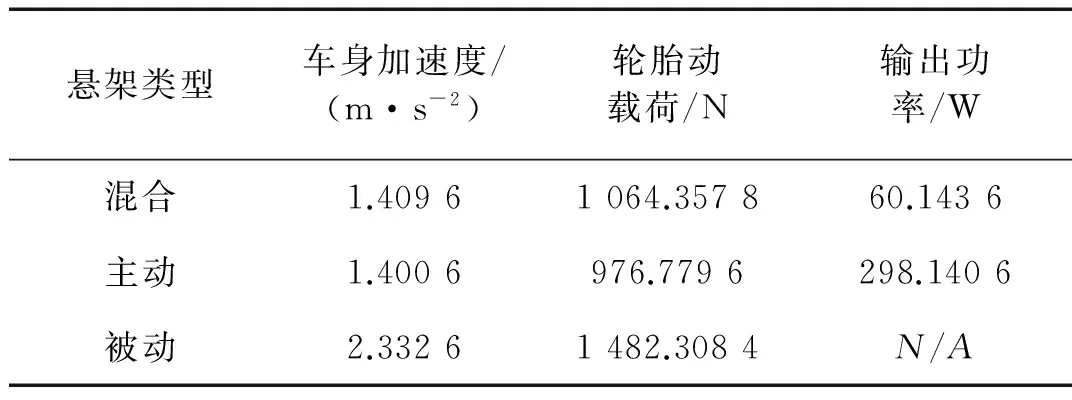
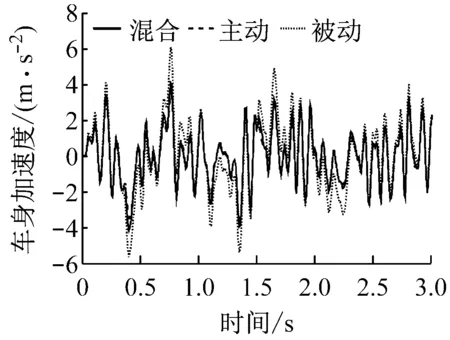
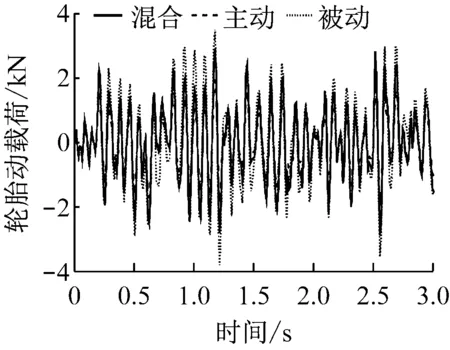
在三种模式下选取的值的大小关系为Cs平顺 混合电磁悬架三种模式下的ks与Cs确定之后,分别对三种模式下悬架的动力学性能进行仿真比较,如图5所示。表4给出了三种模式下动力学性能的均方根值。由图5和表4可见,三种模式下悬架的动力学性能表现符合设计时的预期目标。 (a) (b) Fig.5 Comparison of time domain simulation of the suspension dynamic performance of three modes 表4三种模式下悬架动力学性能均方根值 Tab.4RMSvalueofthesuspensiondynamicperformanceofthreemodes 工作模式车身加速度/(m·s-2)轮胎动载荷/N综合模式1.40961064.3578运动模式2.6033837.6998平顺模式0.93351545.1331 为验证混合电磁悬架能在减少能量消耗的同时,改善悬架的动力学性能,将混合电磁悬架、主动悬架、传统被动悬架三种悬架进行仿真对比。其中,主动悬架也采用LQG控制且结构中不包含被动阻尼器,混合电磁悬架的模式为综合模式。 图6和表5给出了三种不同的悬架的车身加速度和轮胎动载荷的时域响应,可见混合电磁悬架与主动悬架相比于传统被动悬架,均显著提升了动力学性能,且混合电磁悬架和主动悬架的性能表现相差不大。 图7为混合电磁悬架与主动悬架的直线电机输出功率对比,从表5中可见混合电磁悬架的输出功率仅为主动悬架输出功率的20%,大幅减少了能量的消耗。 表5不同类型悬架动力学性能与能耗均方根值 Tab.5RMSvalueofthesuspensiondynamicperformanceofdifferentkindsofsuspension 悬架类型车身加速度/(m·s-2)轮胎动载荷/N输出功率/W混合1.40961064.357860.1436主动1.4006976.7796298.1406被动2.33261482.3084N/A (a) Fig.6 Comparison of time domain simulation of the suspension dynamic performance of different kinds of suspension (b) 图7 混合电磁悬架与主动悬架的能耗对比 Fig.7 Comparison of energy consumption between hybrid electromagnetic suspension and active suspension 为验证仿真结果的正确性,进行了1/4台架试验。台架结构布置如图8所示。 图8 单通道台架试验布置图 图9可以看出,混合电磁悬架与全主动悬架的平顺性与轮胎接地性性均明显优于传统被动悬架,且全主动悬架略微优于混合电磁悬架。 图10表明,在低频共振区,混合电磁悬架的平顺性介于全主动悬架与传统被动悬架之间,轮胎接地性相比与传统被动悬架得到明显改善,与全主动悬架差异不大;在高频区,混合电磁悬架与主动悬架的平顺性相比与传统被动悬架没有明显改善,但是在轮胎接地性方面,都明显优于传统被动悬架。所以,试验结果表明,混合电磁悬架能够明显改善悬架的动力学性能,与仿真结果相符。 图11、图12表明,仿真结果与试验结果基本一致,且混合电磁悬架能有效减少主动控制能耗。 (a) (b) (a) (b) Fig.9 Comparison of time domain response of vehicle body acceleration and tire dynamic load 图10 车身加速度和轮胎动载荷频域响应对比 Fig.10 Comparison of frequency response of vehicle body acceleration and tire dynamic load 图11 不同悬架电机功率时域响应对比 Fig.11 Comparison of motor power time domain response of different suspensions 图12 试验与仿真结果对比 (1) 混合电磁悬架在不同的模式下,LQG控制策略的加权系数将影响悬架的动力学性能;在加权系数确定的情况下,改变弹簧刚度ks和被动阻尼系数Cs对悬架的动力学性能没有影响。 (2) 不同模式下,弹簧刚度ks和被动阻尼系数Cs均会影响直线电机功率Pa,从而影响悬架能耗。试验结果表明:混合电磁悬架的能量消耗仅为全主动悬架能量消耗的1/3。 (3) 试验结果表明:混合电磁悬架与主动悬架的平顺性差异不大,且在低频共振区平顺性明显优于传统被动悬架;低频共振区混合电磁悬架的轮胎接地性介于主动悬架与传统被动悬架之间,高频共振区三者的轮胎接地性差异不大。 [1] 兰波, 喻凡, 刘娇蛟. 主动悬架LQG控制器设计[J]. 系统仿真学报, 2003, 15(1):138-140. LAN Bo, YU Fan, LIU Jiaojiao. The design of LQG controller of active suspension[J]. Journal of System Simulation, 2003, 15(1):138-140. [2] 曹民, 刘为, 喻凡. 车辆主动悬架用电机作动器的研制[J]. 机械工程学报, 2008, 44(11):224-228. CAO Min, LIU Wei, YU Fan. Development on electromotor actuator for active suspension of vehicle[J]. Chinese Journal of Mechanical Engineering, 2008, 44(11):224-228. [3] WANG J, WANG W, ATALLAH K. A linear permanent-magnet motor for active vehicle suspension[J]. Vehicular Technology, IEEE Transactions on, 2011, 60(1): 55-63. [4] 唐诗晨, 陈龙, 汪若尘, 等. 基于阻尼多模式切换的主动悬架最优控制研究[J]. 广西大学学报(自然科学版), 2014(2):300-307. TANG Shichen, CHEN Long, WANG Ruochen, et al. Research on optimal control of active suspension based on damping multi-modal switching[J]. Journal of Guangxi University(Natural Science), 2014(2):300-307. [5] 谢健, 汪若尘, 叶青, 等. 直线电机式主动悬架协调车身姿态控制研究[J]. 汽车工程学报, 2015,5(5):341-347. XIE Jian, WANG Ruochen, YE Qing, et al. Study on coordination control of body posture for active suspension with linear motor[J]. Chinese Journal of Automotive Engineering, 2015, 5(5):341-347. [6] 陈龙, 江浩斌, 周孔亢, 等. 半主动悬架系统设计及控制[J]. 机械工程学报, 2005, 41(5):137-141. CHEN Long, JIANG Haobin, ZHOU Kongkang, et al. Control and design for semi-active suspension[J]. Chinese Journal of Mechanical Engineering, 2005, 41(5):137-141. [7] NAKANO K, SUDA Y, NAKADAI S. Self-powered active vibration control using a single electric actuator[J]. Journal of Sound and Vibration, 2003, 260(2): 213-235. [8] KAWAMOTO Y, SUDA Y, INOUE H, et al. Electro-mechanical suspension system considering energy consumption and vehicle manoeuvre[J]. Vehicle System Dynamics, 2008, 46(Sup1): 1053-1063. [9] 来飞, 黄超群. 采用电磁作动器的车辆主动悬架的研究[J]. 汽车工程, 2012, 34(2):170-174. LAI Fei, HUANG Chaoqun. An investigation into vehicle active suspension with electromagnetic actuator[J]. Automotive Engineering, 2012, 34(2):170-174. [10] 裴金顺, 李以农, 王艳阳, 等. 采用电磁直线电机的主动悬架控制系统的设计与能量分析[J]. 汽车工程, 2014(11):1386-1391. PEI Jinshun, LI Yinong, WANG Yanyang, et al. Design and energy analysis of an suspension control system with electromagnetic linear motor[J]. Automotive Engineering, 2014(11):1386-1391. [11] EBRAHIMI B, BOLANDHEMMAT H, KHAMESEE M B, et al. A hybrid electromagnetic shock absorber for active vehicle suspension systems[J]. Vehicle System Dynamics, 2011, 49(1/2): 311-332. [12] GYSEN B L J, PAULIDES J J H, JANSSEN J L G, et al. Active electromagnetic suspension system for improved vehicle dynamics[J]. Vehicular Technology, IEEE Transactions on, 2010, 59(3): 1156-1163. [13] GYSEN B L J, VAN DER SANDE T P J, PAULIDES J J H, et al. Efficiency of a regenerative direct-drive electromagnetic active suspension[J]. Vehicular Technology, IEEE Transactions on, 2011, 60(4): 1384-1393. [14] 柴陵江, 孙涛, 冯金芝, 等. 基于层次分析法的主动悬架LQG控制器设计[J]. 汽车工程, 2010, 32(8):712-718. CHAI Lingjiang, SUN Tao, FENG Jinzhi, et al. Design of LQG controller for active suspension system based on analytic hierarchy process[J]. Automotive Engineering, 2010, 32(8):712-718. [15] 闫光辉, 关志伟, 杜峰, 等. 车辆主动悬架自适应LQG控制策略研究[J]. 机械科学与技术, 2014, 33(3):432-437. YAN Guanghui, GUAN Zhiwei, DU Feng, et al. Study on the control strategy of adaptive LQG for active suspension vehicle[J]. Mechanical Science and Technology for Aerospace Engineering, 2014, 33(3):432-437.3 仿真分析


4 试 验






5 结 论
