后驱燃料电池客车的控制策略开发
2018-02-21郑松林郝景贤饶洪宇
王 键,郑松林,郝景贤,饶洪宇
(1.上海理工大学 汽车研究所, 上海 200093; 2.上汽集团商用车技术中心, 上海 200438)
近些年来,我国能源危机和环境问题日益严重,新能源汽车成为解决这个问题的有效途径之一[1-3]。燃料电池汽车(fuel cell vehicle)具有零排放、高效率和高功率密度等优点,被公认为最有发展前景的新能源汽车[4-5]。在燃料电池的研究领域中,能量管理策略一直是研究的重点和热点,但目前已经商业化的控制策略只有根据工程经验而设计的开关式控制策略和功率跟随式控制策略[6-7]。模糊逻辑指模仿人脑的不确定性概念判断、推理思维方式,对于模型未知或不确定的描述,系统不需要建立被控对象的精确数学模型,使其设计简单、便于应用、比较容易建立语言规则[8],其优点是控制系统鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱,尤其适合非线性、时变及纯滞后系统的控制。本文以某后驱燃料电池客车为例,进行了燃料电池汽车动力系统的选型和参数匹配,并在此基础上研究模糊控制策略,最后对模糊控制策略和传统功率跟随式控制策略进行对比仿真。
1 燃料电池汽车动力系统结构与参数匹配
1.1 燃料电池汽车动力系统结构
目前的燃料电池汽车动力系统如图1所示,包括了燃料电池、动力电池、DC/DC变换器、电机控制器和电机等部分,其优点如下:① 动力电池可以提供燃料电池启动时空压机所需供电和为电堆加热等;② 动力电池可以提供行驶过程中的峰值电流,降低了对燃料电池功率和动态特性的需求,降低了燃料电池的研发成本;③ 动力电池可以吸收制动能量,提高能量利用效率;④ 单向DC/DC变换器控制更为简单,成本也更低。
1.2 整车参数和设计目标
本文研究的燃料电池汽车是在某商用客车的基础上开发的一款后驱车型,其整车基本参数如表1所示。
通过对目前主流电动客车进行试验分析,制定了如表2的动力性和经济性设计目标。
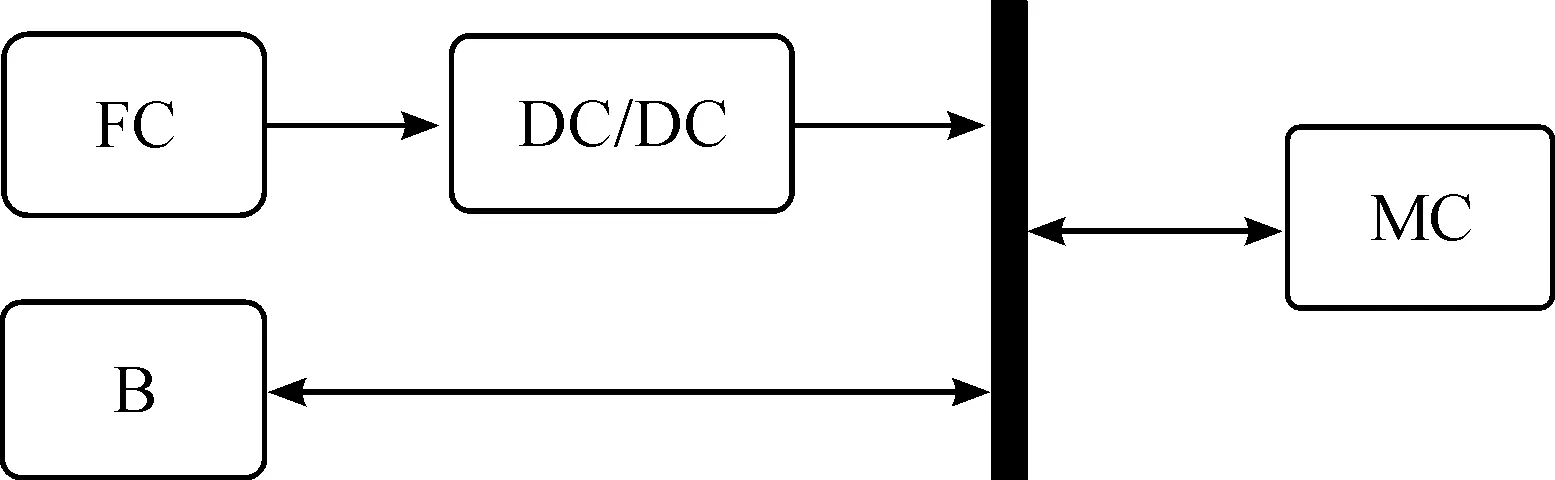
FC为燃料电池,B为动力电池,DC/DC为单向DCDC转换器,MC为电机控制模块和电机
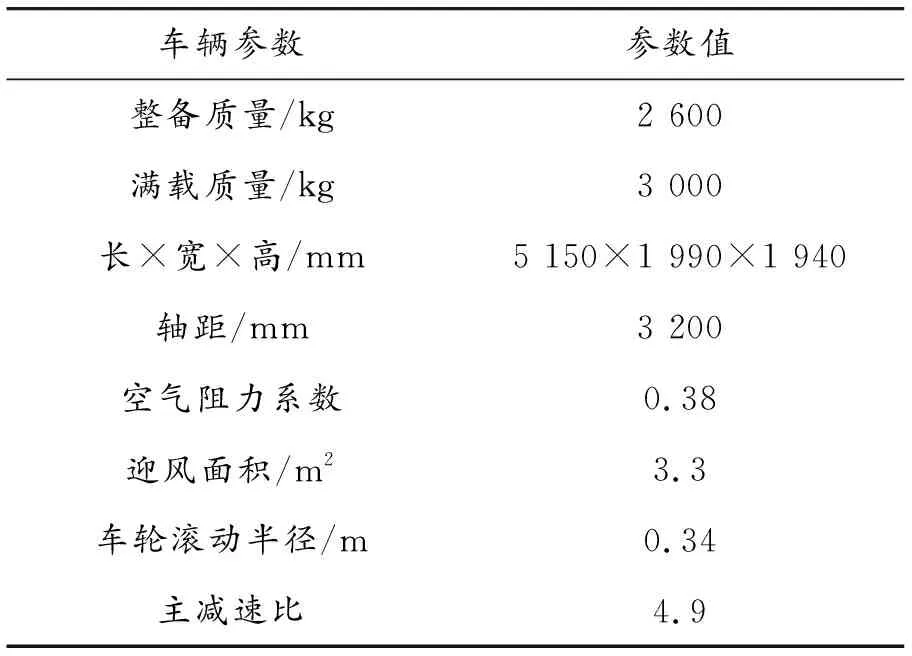
车辆参数参数值整备质量/kg2 600满载质量/kg3 000长×宽×高/mm5 150×1 990×1 940轴距/mm3 200空气阻力系数0.38迎风面积/m23.3车轮滚动半径/m0.34主减速比 4.9
表2 整车动力性和经济性目标
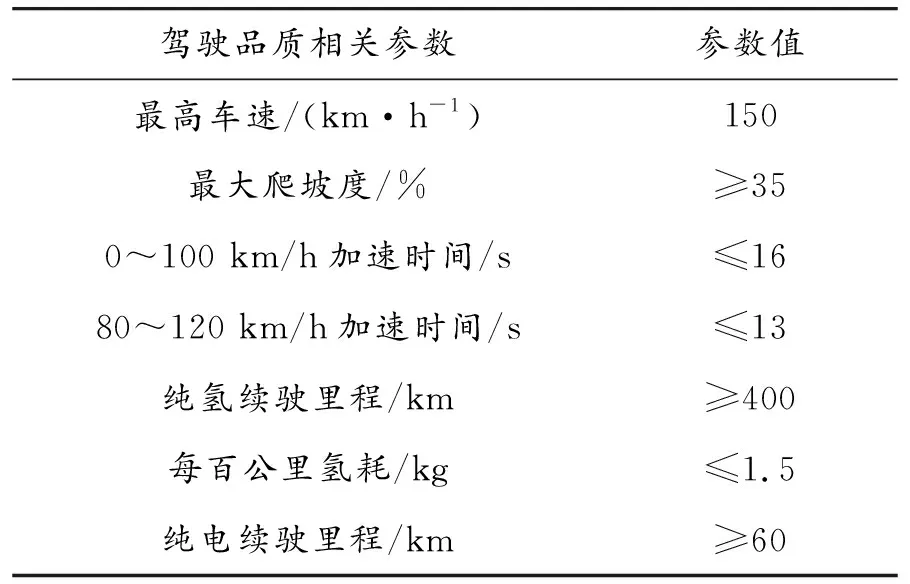
驾驶品质相关参数参数值最高车速/(km·h-1)150最大爬坡度/%≥35 0~100 km/h加速时间/s≤1680~120 km/h加速时间/s≤13纯氢续驶里程/km≥400每百公里氢耗/kg≤1.5纯电续驶里程/km≥60
1.3 电机参数的确定
电机的最高转速发生在电机的恒功率区,由汽车的最高速度可以求得。根据车速和转速对应的关系式可知[9]:
(1)
根据计算值选取电机最高转速为6 000 r/min,其中额定转速ne为4 800 r/min。
电机的峰值扭矩由最大爬坡度确定,汽车爬坡的过程中车速很低,因此可以忽略空气阻力,则有
(2)
其中:滚动阻力系数f取0.01;机械效率η为0.92;35%的坡的坡度角约为20°。代入计算可得所需电机峰值扭矩≥779 N·m,因此选取电机峰值扭矩为800 N·m。
根据最高车速可求得最大功率Pmax1为:
(3)
计算得到Pmax1≥73.45 kW。
电机的峰值功率不仅取决于最高车速,还需要考虑加速时间。在水平路面上,汽车由起始车速加速到目标车速的加速时间为
(4)
车辆行驶驱动力与电机峰值功率、峰值转矩之间的关系为
(5)
(6)
根据设计目标的加速时间,代入公式可得Pmax2≥123 kW。正常情况下,当峰值功率Pmax满足加速性能指标的要求后,其峰值功率也满足爬坡的性能指标要求。根据计算结果取其中最大值,再算上整车效率和安全系数,最终确定电机的峰值功率Pmax为130 kW。确定好电机峰值功率、最高转速和峰值扭矩后即可选择电机的具体类型,永磁同步电机因为具有高效、高控制精度、高转矩密度、良好的转矩平稳性及低震动噪声的优点成为首选[10]。其输出特性如图2所示。
1.4 燃料电池参数的确定
目前较为成熟的燃料电池为质子交换膜燃料电池(PEMFC),它的优点是用空气作为氧化剂降低了使用成本、室温环境即能正常工作、比功率较大、启动迅速、输出功率可自由调整等。本文燃料电池汽车是以燃料电池为主要能源的新能源汽车,因此使用的是目前输出功率和效率都较高的车用燃料电池。其最大功率为60 kW,功率上升率为2.13 kW/s,功率下降率为4.15 kW/s,最高效率接近70%,其效率曲线如图3所示。根据车身空间,可以放置的储氢瓶的压力为70 MPa,储氢6 kg。JP
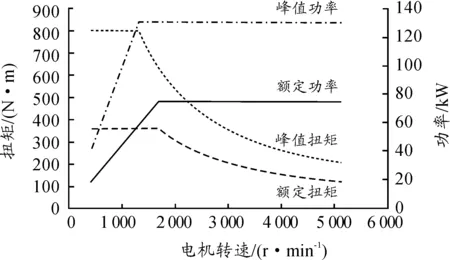
图2 电机的输出特性
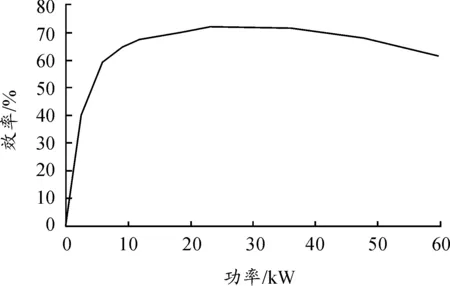
图3 燃料电池效率曲线
1.5 动力电池参数的确定
动力电池采用的是磷酸铁锂电池,根据车辆设计指标需要确定动力电池的功率需求和能量需求。PEMFC和动力电池共同提供汽车的最大需求功率,即:
Pbmax≥Pmmax-Pfc
(7)
其中Pbmax为动力电池的最大功率。通过计算可知Pbmax最小功率为70 kW,但汽车在冷启动工况时,燃料电池并不能输出能量,而且汽车急加速工况时燃料电池的功率上升率(4.15 kW/s)较低,所以在某些工况下主要由动力电池为电机供电,则将动力电池的峰值输出功率定在100 kW。为了保证燃料电池汽车60 km的纯电续驶里程,根据纯电动客车的设计经验,将动力电池的电量定在18 kW·h。
2 ADVISOR后轴驱动形式的二次开发
ADVISOR所有默认车型都是前轴驱动形式,但是本文研究的对象为后驱车型,因此需要对ADVISOR进行二次开发。
首先对后驱汽车进行受力分析建立后驱汽车动力学模型。假设后轴驱动汽车处于坡度为α的路面上,初速度为V0,在极限附着力为Fmax驱动力(或制动力)作用下所能产生的最大末速度为Vrtmax(或最小末速度Vrtmin),其受力分析如图4所示。图中:m为整车质量(kg);g为重力加速度(m/s2);a为加速度(m/s2);FN为后轮垂直载荷(N);Fw为空气阻力(N);Fi为坡道阻力(N);Tf1为前轮滚动阻力偶矩;Tf2为后轮滚动阻力偶矩;α为坡度角(rad)。

图4 后轴驱动汽车动力学模型
根据汽车行驶方程式得到:
Fmax-Fw-Ff-Fi=ma
(8)
式中:
Fmax=Fq=FN·μmax
Fi=mgsinα
Tf=Ffr=Wfr
Ff=mgcosα(f1+f2·Vaver)
其中:Fmax为最大驱动力或最大制动力(N);μmax为最大附着系数;L、L1为车轴距和前轴距(m);hg为车辆质心高度(m);Ff为汽车总的滚动阻力(N);r为车轮的滚动半径(m);W为车轮所受的垂直于路面的压力(N);f1、f2分别为前后轮滚动阻力系数;A为迎风面积(m2);Cd为空气阻力系数;ρ为空气密度(kg/m3);Vaver为平均速度(m/s)。
假设仿真过程中一个迭代间隔时间为dt,那么在此仿真过程中的加速度a和平均速度Vaver如下式所示:
(9)
同理,可以得到制动工况对应的最小速度Vrtmin
(10)
在整车控制模块库中,复制

图5 牵引力控制模块
3 燃料电池汽车模糊控制策略设计
汽车在运行的过程中,存在启动、加速、巡航、滑行、制动等各种变化,燃料电池和锂电池组的状态也在动态变化,动力系统的工作模式也在动态切换[12]。为了实现对汽车能量的高效管理,本设计的是双输入单输出的模糊控制器。输入参数是汽车行驶过程中的需求功率Preq和动力电池的SOC,输出参数为燃料电池前端DCDC变换器的输出功率E-Pwr。 模糊控制器主要由输入量化、模糊化、模糊推理、反模糊化、输出量化等5部分组成,其中模糊推理为控制策略的核心,主要包括隶属度函数和模糊规则两部分[13]。
在Matlab的命令窗口输入“fuzzy”创建模糊控制器,为了便于设计,将系统的输入、输出量通过量化因子调整使其模糊论域为[0 1]。输入量Preq的模糊子集为{N1,N2,N3,N4,N5},隶属函数采用的是三角形和梯形相结合,如图6所示。输入量动力电池SOC的模糊子集为{L,M1,M2,M3,H},采用的是梯形隶属函数,如图7所示。输出量E-Pwr的模糊子集为{O1,O2,O3,O4,O5,O6},其隶属函数也采用三角形和梯形相结合的方式,如图8所示。
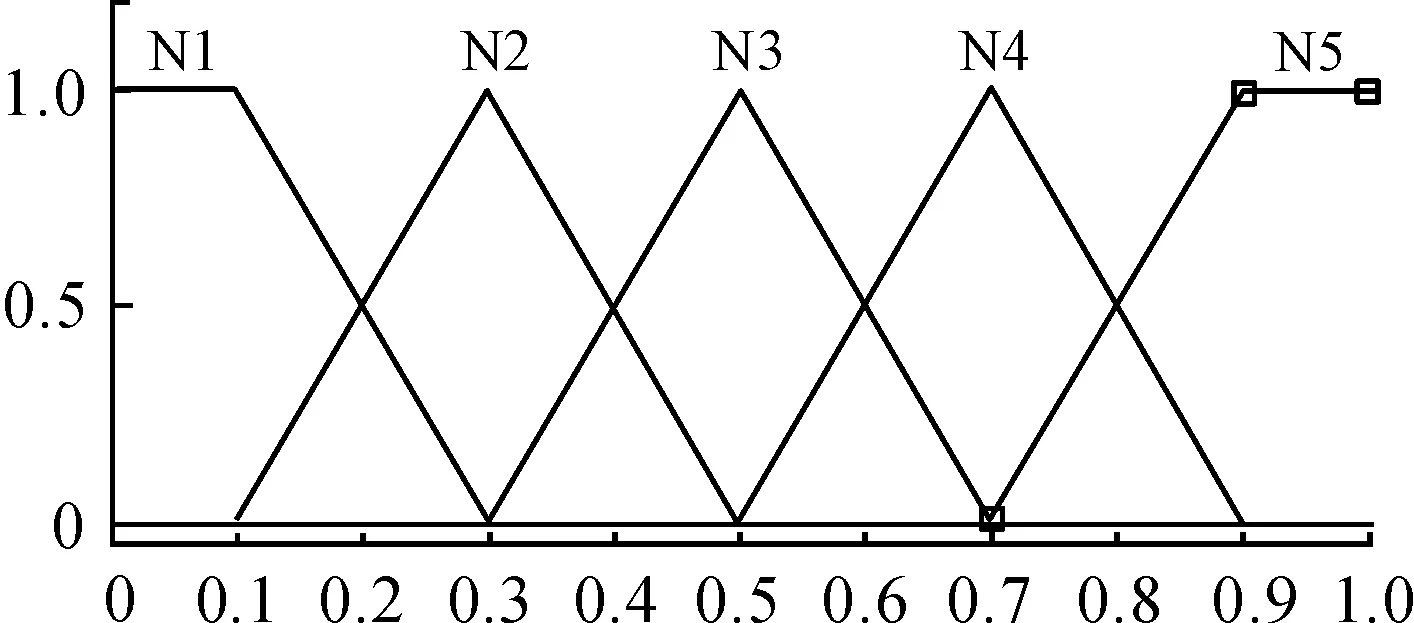
图6 汽车需求功率隶属度函数
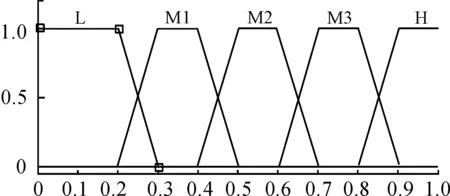
图7 动力电池SOC隶属度函数
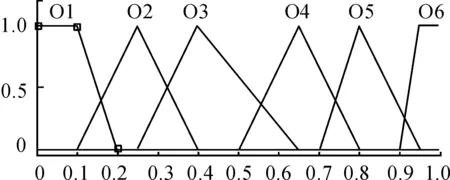
图8 输出功率隶属度函数
在确定了输入、输出参数的隶属度函数之后,编写模糊控制规则如表3所示,由此可以得到直观的模糊推理输入/输出曲面,如图9所示。制定模糊控制规则主要依据以下几点:

表3 模糊控制规则
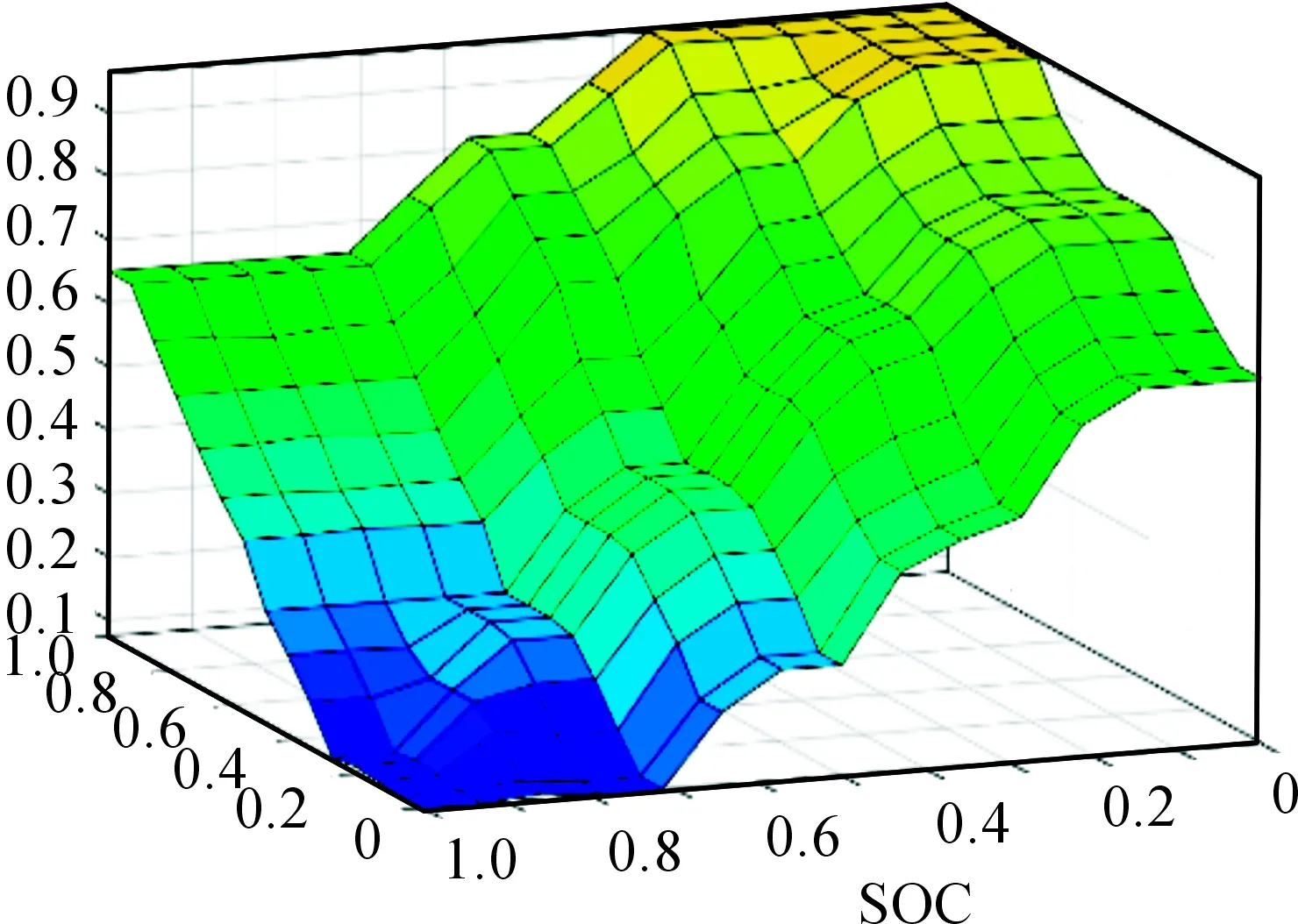
图9 模糊推理输入/输出关系曲面
1) 当动力电池SOC较高且汽车需求功率较低时,以动力电池为主要能源;
2) 当需求功率较高时,动力电池和燃料电池共同作为主要能源;
3) 当动力电池SOC较低时,燃料电池为主要能源并且为动力电池进行充电;
4) 汽车处于制动和减速工况时,通过电机倒拖进行能量回收为动力电池充电。
4 建模与仿真分析
4.1 仿真模型搭建
利用Matlab/Simulink搭建模糊控制系统模型,如图10所示,将前面建立的模糊控制器加载到Fuzzy Logic Controller中,再将该控制系统封装到ADVISOR的控制策略当中[14]。根据汽车整车参数和各零部件参数完成燃料电池汽车模型的搭建,得到如图11所示的后驱燃料电池汽车仿真模型。
4.2 仿真分析
根据GB/T 18386新能源汽车续驶里程测试要求,采用NEDC工况进行能量消耗测试。为了保证结果正确,将动力电池电量初始值设为0.7,并进行3次NEDC循环测试。为了验证模糊控制策略的高效性,将其与传统功率跟随式控制策略进行对比,得到如图12所示的仿真结果和如图13所示的能量使用和传递情况。
通过仿真结果分析可知:模糊控制策略的动力电池SOC的波动较小,仅为3%左右(功率跟随式控制策略SOC波动为10%左右);2种控制策略下,燃料电池汽车的动力性没有明显差别;最高车速为153.7 km/h;0~100 km/h加速时间为16 s; 80~120 km/h加速时间为11.1 s;最大爬坡度42%。因仿真结束时动力电池SOC不一样,所以先进行能量平衡计算,将动力电池多消耗的电量叠加到氢气的消耗。根据能量使用和传递情况,对仿真数据进行对比,分析结果如表4所示。
表4 仿真分析结果
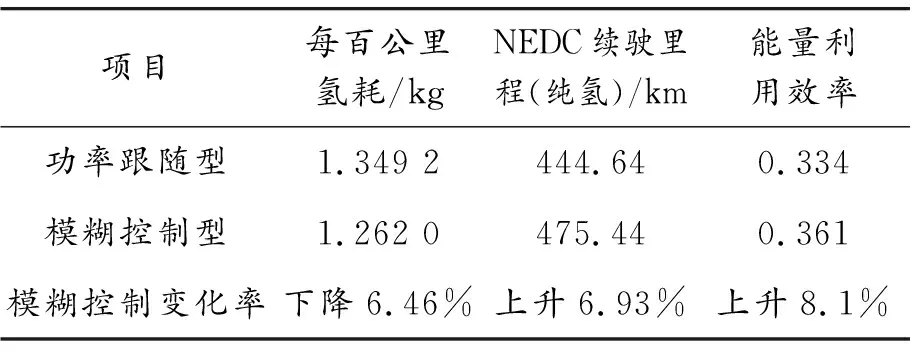
项目每百公里氢耗/kgNEDC续驶里程(纯氢)/km能量利用效率功率跟随型1.349 2444.640.334模糊控制型1.262 0475.440.361模糊控制变化率下降6.46%上升6.93%上升8.1%

图10 模糊控制系统模型

图11 燃料电池汽车仿真模型
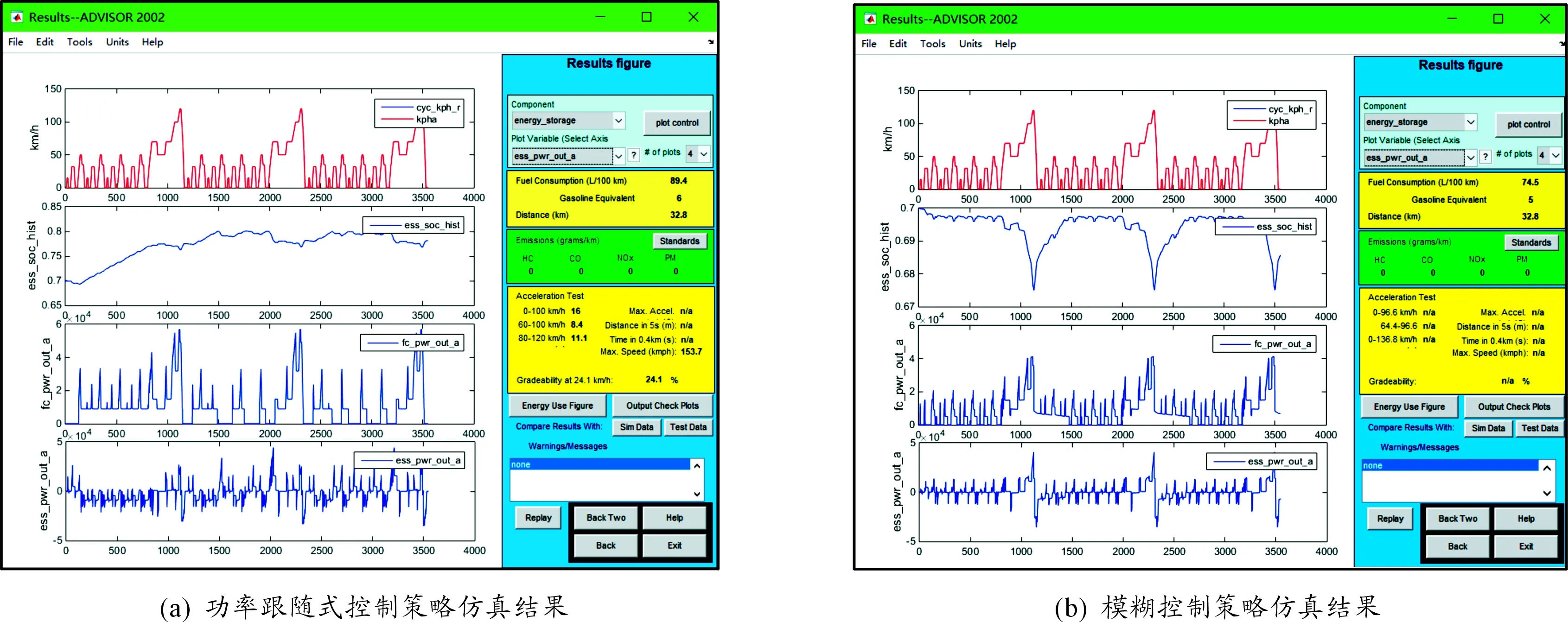
图12 仿真结果
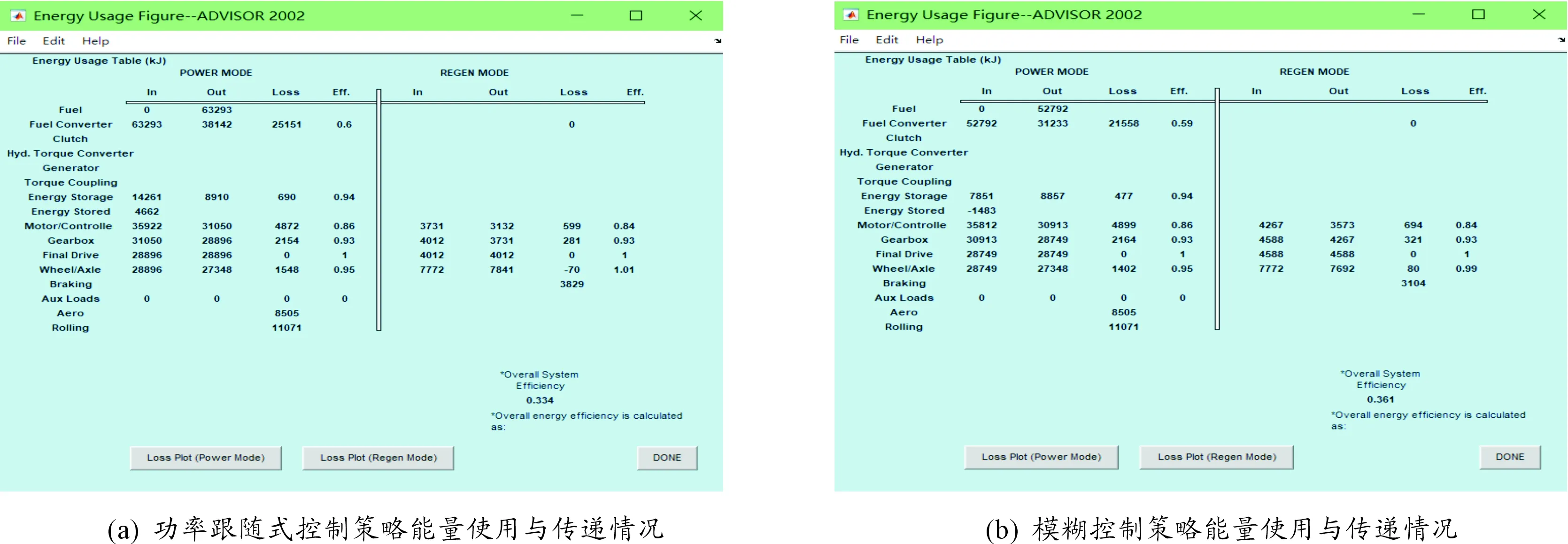
图13 能量使用和传递情况
5 结束语
从本文分析可知,整车的动力性仿真结果满足设计需求,说明本文的动力性的参数匹配和能量控制策略满足实际情况,并且本文利用模糊控制搭建了能量管理策略,相较于传统功率跟随式控制策略在能量的利用效率上有明显的提高。
