四自由度机械手控制系统的设计
2018-02-20郑书华欧阳青朱宇科
安 军 郑书华 欧阳青 朱宇科
(宁波工程学院,宁波 315211)
搬运机械手是在自动线上搬运物料的一种自动化装置,主要功能是将物料从生产线上转运到下道工序或进行存放操作。本文设计的四自由度的机械手工作流程如下:立柱正转→上升→手臂伸出→抓取并夹持物料→手臂缩回→立柱反转→立柱下降→手臂伸出→松开并放置物料→手臂缩回。本文主要采用继电器系统设计了机械手电气控制和气动设计,控制方法相比较PLC控制更加可靠,可以有效提升生产效率,为简易机械手设计及制造起到借鉴作用。
1 四自由度机械手模型的建立
本文设计的四自由度简单机械手,有四个受控制的自由度,其中三个自由度不是确定的,本文选择z轴旋转,z轴和x轴为机械手研究对象,在这几个自由度控制下机械手进行上下移动、伸缩和旋转动作。四自由度机械手由旋转关节移动连杆组成,适用于运动距离较大场合,其中绕Z轴旋转是为了快速实现机械手所夹持工件位置变化;沿Z轴移动主要为了使夹持位置和旋转更加迅速方便;沿X轴移动能够实现大距离、小运动,节约空间。机械手模型如图1所示。
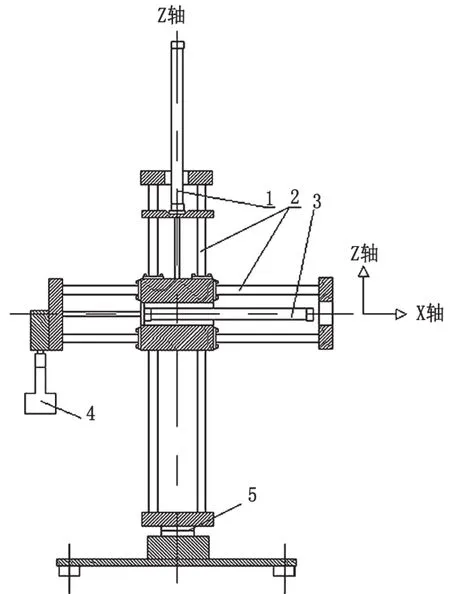
图1 机械手关键部件连接图
具体控制流程如下:
(1)机械手展开手夹打开→旋转工作台正转到位置1→Z轴气缸推动导杆垂直下降到位置1′→X轴气缸伸长到位置3→机械手夹夹取工件;
(2)Z轴气缸推动导杆垂直上升到位置1→旋转台反转→X轴气缸收缩导杆动作到位置3′;
(3)Z轴气缸推动导杆垂直下降到位置4→机械手夹打开放工件;
(4)Z轴气缸推动导杆垂直上升到位置1→旋转工作台正转到位置1→Z轴气缸推动导杆垂直下降到位置1′→X轴气缸伸长到位置3→机械手夹夹取工件;
(5)Z轴气缸推动导杆垂直上升到位置1→旋转台反转→X轴气缸收缩导杆动作到位置3′;
(6)Z轴气缸推动导杆垂直下降到位置4→机械手夹开夹→放工件。
2 气动原理
机械手动作元件由四个气缸控制,分别为两个直线运动气缸、一个气动爪和一个旋转气缸。气动爪用于夹取工件,通气状态下只存在夹紧和松开两种状态;在另外三个气缸运动极限位置分别安装磁感应式接近开关,对气缸位置进行检测。旋转气缸绕中心旋转角度最大为180°,本设计只为达到动作顺序,对精度无太高要求;气缸运动速度由与其连接的节流阀控制。在失电状体下,各气缸均在设定初始状态,正反装气缸初始位置为正转极限;伸缩气缸初始状态为缩回;上下气缸初始状态为下降极限位置;气缸爪初始为松开。各初始状态均在电磁换向阀失电状态下保持稳定。
3 继电器电气设计
在系统设计中,如图3所示,对于任务动作的衔接,一部分用磁感式接近开关,在没有磁感式接近开关的地方采用时间继电器进行下一步动作。另外,设计思路上利用中间继电器KA实现上一个动作的停止和下一个动作的启停,例如,图中的中间继电器KA5的作用在SQ5接通后,使线圈KM5得电,利用它的常闭触点断开了KM1线圈的得电;时间继电器KT1延时6S后,延时闭合触点闭合,接通了KM2和Y2的线圈,执行延时后的相应动作, 时间继电器KT3,它的延时打开触点KT3在延时6s后断开了整个机械手的动作。气动回路部分通过气缸上的磁感式接近开关,将各气缸位置状态信息反馈给继电器控制系统。继电器系统通过控制三位六通阀实现气路的改变,从而改变气缸的运动方向。
4 结论
基于继电器控制系统设计了一款四自由度机械手控制系统,改善了原有机器运转时抖动和失步问题,该系统仅利用四个自由方向运动就能使系统处于良好状态。根据实际工作需求,可进一步完善夹紧装置,节约空间位置。在条件允许情况下,采用四自由度机械手控制系统旋转方式代替手动的操作,既可以减小占用空间,也可以提高机械加工效率。
