一种双连杆混合传动的机器人手指设计
2018-02-20高瑞祺
高瑞祺
(首都师范大学附属育新学校,北京 100096)
人类的双手从行走中解放后变得越来越灵巧,灵巧的双手不仅让人类能够适应复杂多变的自然环境,更赋予了人类改造自然的能力。如同人类一样,机械手在机器人操作中也起着重要作用,作为机器人重要的执行部件,机器手执行抓持指令已发展为机器人领域的一个重要分支,手指设计对机械手抓取方式、灵活性、控制难度等都有极大影响。
目前许多科研机构对机械手及其手指部件设计做了大量研究,并研制出一批具有代表意义的机械手,如NASA的Robonaut R2机械手、DLR的DLR HASy机械手、意大利的iCub机械手、英国的Shadow机械手以及SARAH机械手等。本文将借鉴现已有的机械手先进设计理念,设计一种机器人手指,采用连杆传动,它对操作物体有较强的适应性,能够对不规则物体进行抓取。
1 机器人手指设计
机器人手指由指节和关节组成,关节通过指节进行连接。根据关节上有无驱动源,可将机器人手指分为直驱和欠驱动两种。手指直驱一般通过在手指关节上设计电机等驱动源来实现,直驱手指具有操控灵活的特点,但其对控制水平要求较高,同时对抓取物体的外形适应性较差,为了使各指节能够完全与操作物体贴合,需要传感器的辅助;手指关节采用欠驱动时,在其关节上没有驱动源,关节只起到转轴的作用,由于欠驱动手指驱动源数少于关节数,故其具有抓取目标外形适应能力强、控制简单等优点,同时也存在自由度较少、操控灵活性较差等问题。
参照常见机器人的操作能力,确定手指设计指标,如表1所示。
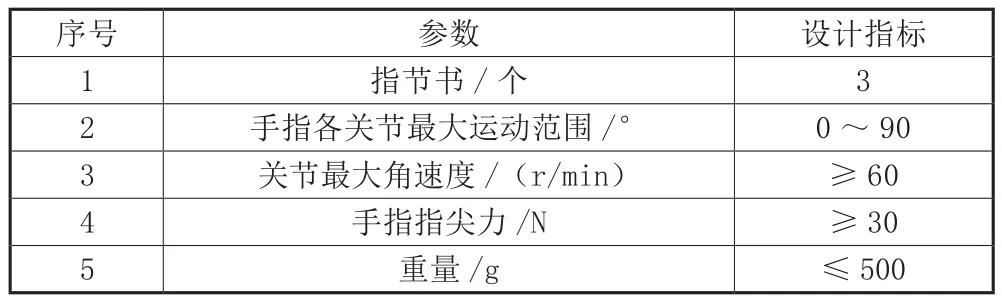
表1 机器人手指设计指标
机械手抓取主要分为包络抓取和精确捏取两种,本文所设计手指既可实现包络抓取功能,也可实现精确捏取功能。包络抓取是指机器人手指各个关节依次与被抓物体接触,最终所有关节均与物体接触,从而达到限制物体运动而实现抓取操作的过程;精确捏取是在手指靠近物体的过程中,只有第三指节,即指尖与被抓物体接触。
根据设计需求,指尖力不小于30N,手指长度依据人手尺寸确定为140mm,则手指根部关节最小输出力矩为30×0.14=4.2N·m。综合分析输出力矩、关节角速度需求,同时考虑手指轻量化,手指驱动源采用电机加减速器的方式实现,本文电机选择大功率密度的Maxon直流无刷电机EC-i 40电机,电机后端配置有码盘,其长时间工作力矩为84N·m,减速器选择Harmonic小体积谐波减速器,减速比为100。考虑传动效率时,该传动系统长时间输出力矩为5.8N·m,满足设计需求。
综上所示,本文所设计手指为利用连杆进行传力的欠驱动单自由度手指,该手指共有三个指节,三个转轴,各指节之间通过转轴相连,转轴上设计扭簧,手指设计有两套四连杆机构,分别为驱动四连杆和平行四连杆。手指设计图如图1所示,驱动四连杆由电机通过锥齿轮驱动手指运动,平行四连杆配合扭簧实现指尖姿态保持,保证手指精确捏取时指尖姿态不变。
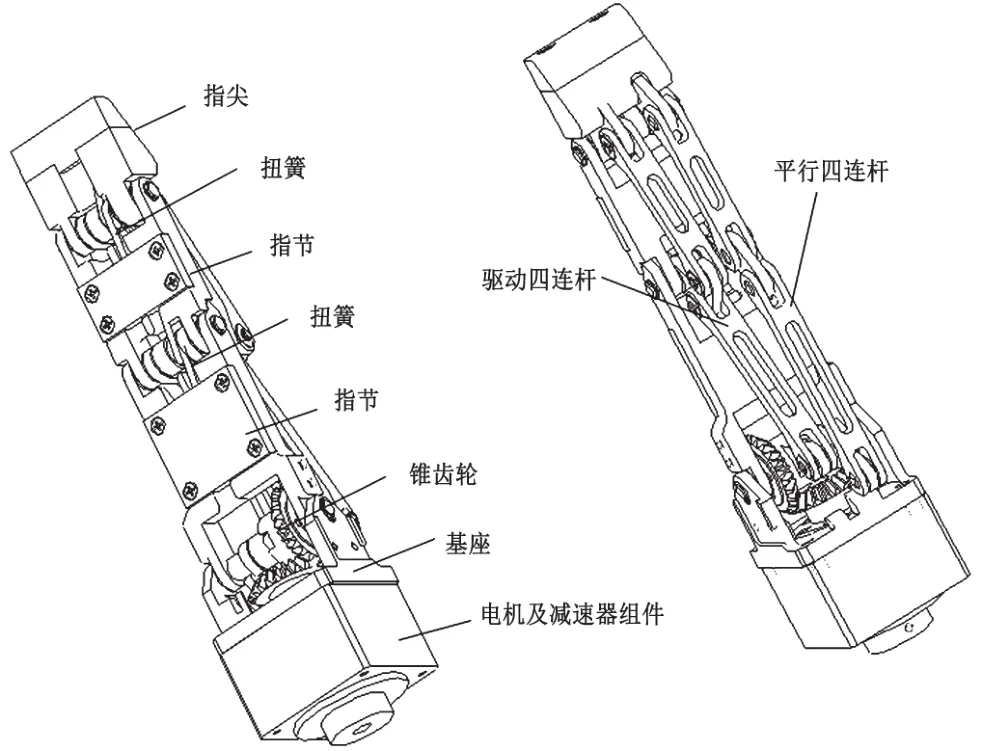
图1 机器人手指设计
手指包络抓取过程如图2所示,参与抓取的手指各关节均与被操作的物体相接触。
精确捏取过程如图3所示,精确捏取在扭簧、驱动连杆以及平行四边形连杆共同作用实现。具体步骤如下:首先第一、第二指节在机械限位和扭簧共同作用下,构成指面共面,形成一个整体转向物体;其次,第三关节指面在平行四边形连杆和驱动连杆作用下,平行移动靠近物体;最后,在两个手指相向运动下达到力平衡,实现精确捏取。
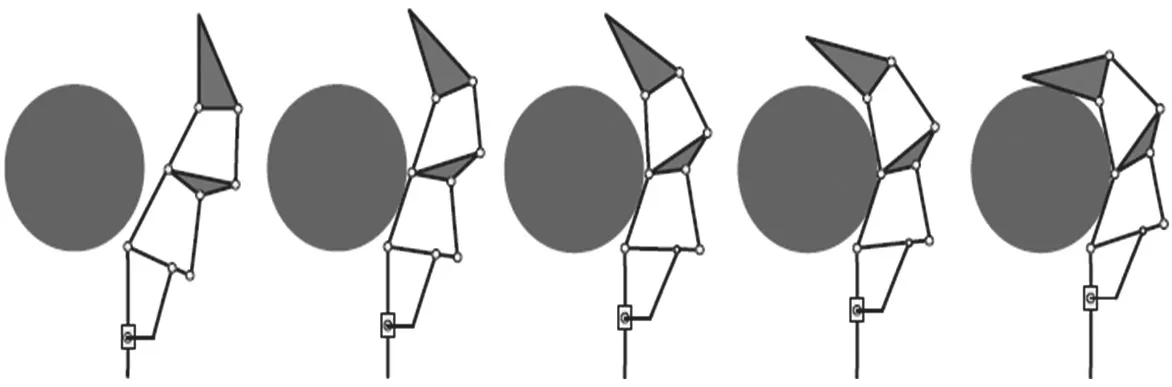
图2 包络抓取实现过程
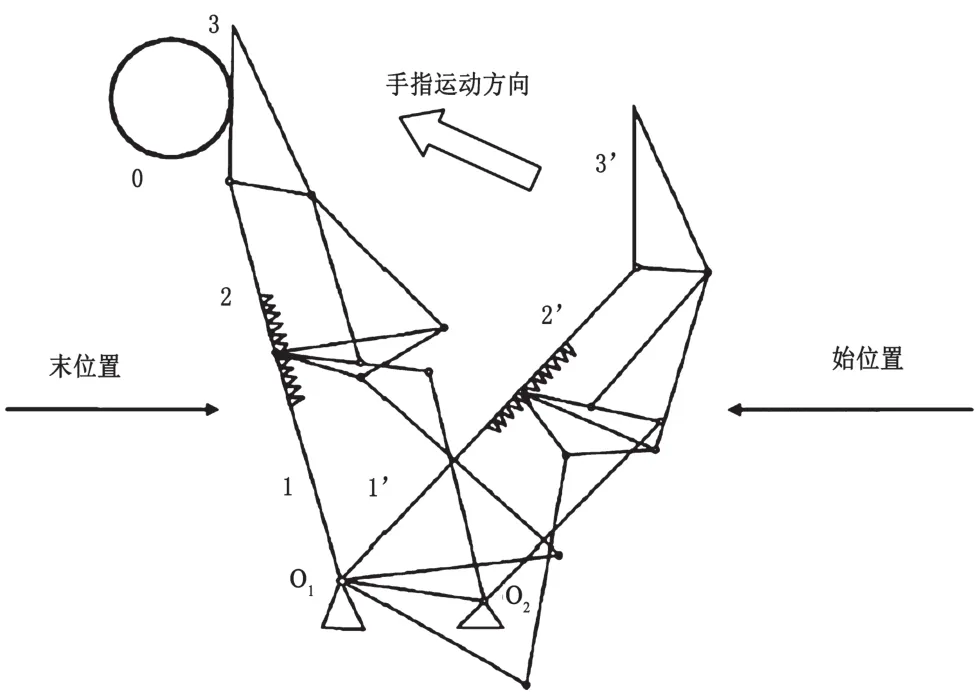
图3 精确捏取实现过程
2 手指参数分析
本文设计机器人手指参数核心是连杆参数,手指连杆参数直接影响手指抓取效果,手指连杆参数定义如图4所示。
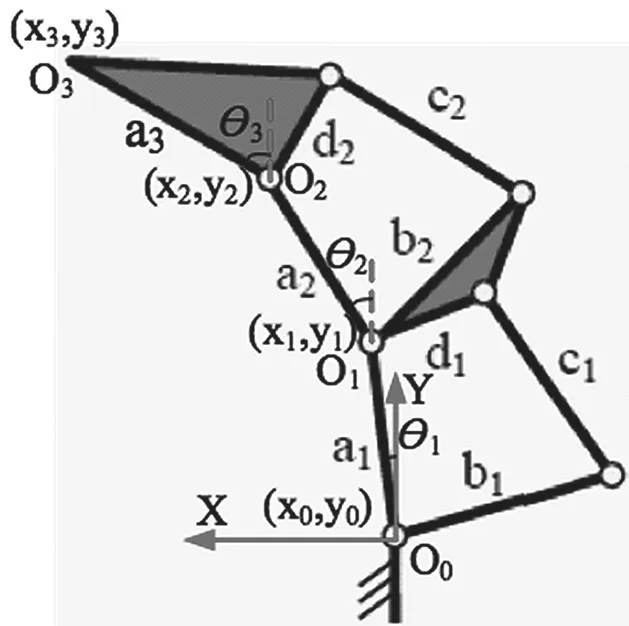
图4 手指驱动连杆简图
分析不同杆件受力情况,为使机器人手指能对多种尺寸物体形成有效包络抓取,需要满足:b1+c1>a1+d1、b2+c2>a2+d2,依据手指长度、抓取物体尺寸以及机械干涉约束,各参数取值情况如下a1=62mm、b1=30mm,c1=55mm,d1=13.6mm,a2=43mm,b2=22mm,c2=42mm,d2=11mm,手指总长度为140mm,指尖长度a3取36mm。
本设计机器人手指为欠驱动手指,只有一个驱动源,各手指指节之间依靠转轴上的扭簧传递动力。建立图4所示的惯性坐标系,在该坐标系内,对手指指尖O3的运动进行分析。
机器人手指进行抓取操作时,当a1与被抓物体接触后,该指节将不再发生转动,剩余a2、a3指节继续转动,转动一定角度后当a2与被抓物体接触后,a2停止转动,a3继续转动,直到a3与被抓物体接触。因此指尖O3的运动分为三段。
第一阶段,a1、a2与被抓物体未接触,a3与被抓物体接触时,运动轨迹计算方法如式(1)所示。

第二阶段,a1与被抓物体接触,但a2与被抓物体未接触时,运动轨迹计算方法如式(2)所示。

第三阶段,a1、a2与被抓物体接触,但a3与被抓物体未接触时,运动轨迹计算方法如式(3)所示。

3 手指抓握能力仿真分析
为验证所设计手指的抓握能力,在三维设计软件中对手指的抓握能力进行仿真分析。首先根据手指设计参数建立连杆机构,各杆之间为铰链连接,在基关节处安装加驱动源,在其余两个转轴上设置刚度不同的扭簧,然后使用该手指抓取直径不同的四种圆柱形物体,仿真结果如图5所示。

图5 手指对于不同直径目标物体的包络图
由仿真分析可知,连杆在驱动源作用下发生转动,当根部指节与目标发生接触后,其余指节可继续转动,直到手指三个指节均与目标接触。由仿真分析可知该手指对直径不同的物体均具有较好的抓取包络能力,证明本文所设计手指具有合理性。
4 结论
本文采用双连杆混合传动设计了一种机器人手指,其具有三个指节,各指节之间为铰链连接,在铰链上设计有刚度不同的弹簧,以实现手指的欠驱动。该手指采用一个电机驱动源实现抓握操作,具有结构简单、控制灵活及抓握能力强等优点,经仿真分析,该手指可实现对直径不同物体的有效包络,可广泛应用于操作机器人抓取操作中。
