组合式智能搬运车的设计
2018-02-20魏胜程王文博
蒋 勇 王 强 魏胜程 王文博
(南京理工大学泰州科技学院智能制造学院,泰州225300)
目前快递分拣大多数采用人工或者利用单一机器进行分拣,工作效率低下,并且难以对现代种类繁多货物进行分拣运输。目前,快递行业只能按货物尺寸将之分类至不同仓库,并以不同方式进行分拣搬运,不仅工作量具大了,而且还需要更大面积的仓库。因此组合式智能搬运车的设计,具有重要意义。
1 系统组成和工作原理
本文所设计的组合式智能搬运车三维设计效果如图1所示,主要由电源、控制系统、激光发射器、接收器、驱动电机、车轮、转盘链接机构和双驱动轮双万向轮等结构组成。整个系统初步设计方案由四个可独立工作的搬运小车组成,每个搬运车都带有激光发射器和接收器,用于两两之间识别对接;对接过程中,利用转盘链接机构可保证驱动轮不动,实现平台转动;对接完成后,两车由电磁铁相连接。搬运车采用方形外观设计,载物面积大、实用性强、便于货物运输,能够满足多个搬运车对接需求。

图1 整车三维设计效果
2 系统结构设计
根据理论知识以及试验数据分析计算,进行模拟仿真,设计了车体、转盘链接机构以及双驱动轮双万向轮。车体由上、下两部分组成,如图2所示。上半部主要由机体,小车外壳等部件组成,此外还包括电源、中央控制芯片、电机驱动模块以及降压模块等部件。另外,用于与其他小车对接的激光发射器及接收器装在外壳侧板处,便于 实现对接及修正;
下半部分为动力系统,由驱动电机及车轮组成。

图2 车体的组成
为了让车体工作时具有较高灵活性,上下两部分机体采用了转盘连接,如图3所示。转盘链接机构由一个大直径定齿轮与一个小直径动齿轮组成。定齿轮保持不动,通过动齿轮转动形成一个稳定圆周运动。为避免转盘工作时受驱动电机导线影响,在转盘连接处采用导电滑环设计,滑环上下部分分别位于小车上下连接部分。

图3 上下部分装盘连接
在设计小车底盘时,有普通汽车底盘和履带底盘两种方案,对比两种系统方案,本设计采用了比较折中方式,即左右并列两个驱动轮作为动力,前后加上两个万向轮作为平衡结构,既保证了车体平衡,也保证了车体具有较高灵活性。同时,采用双电机作为驱动动力,有效降低了电池电量消耗,让小车完成更多的运输工作。
3 系统控制设计
系统控制以ESP8266WIFI串口模块为控制核心,采用传感器进行位置检测,使搬运车能够做出各种组合运动,具体控制流程如图4所示。利用ESP8266WIFI串口模块WIFI功能与小车进行远程通信,根据货物重量与大小,发出不同组合信号,控制小车进行运输;利用激光发射器和接收器进行定位,不断发射与接收信号,控制器判断小车是否以及到达对接位置,若未到达,则系统控制小车进行移动与转向,调整小车姿态,保证小车准确对接,如此循环直到小车到达预定对接位置;当小车到达预定对接位置时,系统控制小车进行对接,对接完成后控制电磁铁使两车连接。

图4 小车控制流程图
4 运行情况介绍
根据三维设计效果完成了四辆小车制作,四辆小车可以根据不同货物重量和大小进行灵活组合,满足各种需求,实现多工作状态模式。
(1)物件较小,单个车里能够装载的情况。各小车单独运行,互不干涉,三维效果及实物运行如图5所示。

图5 各小车单独工作状态
(2)物件稍大的情况。两辆小车自动组合,实现搬运,三维效果及实物运行如图6所示。
(3)物件占地面积较大的情况。四辆小车组合成“大田字”形状,联合运送货物,三维效果及实物运行如图7所示。

图6 两两组合工作状态
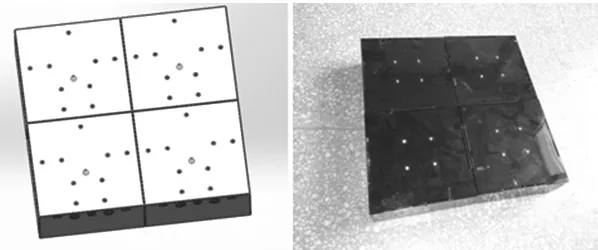
图7 四辆车“大田字”组合工作状态
(4)物件长度较长的情况。四辆小车组合成“长一字”形状,联合运送货物,三维效果及实物运行如图8所示。

图8 四辆车“长一字”组合工作状态
5 结语
组合式智能搬运车优点在于能够针对不同体积货物组合出不同形状,以单一机器来实现仓库货物运输,避免出现大机器搬运小物件、小机器运不了大物件等问题,有效降低了运输成本、工人工作强度以及运输时间,提高了工作效率、载运速度以及货物流通量。
