全方位自动导引车的导航与控制系统研究
2018-02-15刘晓平赵云龙
韩 松,刘晓平,赵云龙,王 刚
(北京邮电大学, 北京 100876)
引 言
随着电子商务的蓬勃发展以及人力成本的不断上升,越来越多的电子商务、物流公司建造了自动化的物流仓储中心,自动化和无人化的程度越来越高。目前,越来越多的物流仓储中心在运输、分拣等环节均使用自动导引车(AGV)来取代人力,减少人力成本,提高工作效率。其中,基于麦克纳姆轮[1]的全方位AGV可以实现前后、左右和自转3个自由度的运动。良好的灵活性使得全方位AGV的控制方式更加多样,对不同工作环境和复杂任务的适应能力更强,有很广阔的应用前景。本文以全方位AGV为研究对象,对其导航和控制系统展开了研究。
为了提高AGV运行路径的灵活性和多样性,越来越多的工厂摒弃传统的磁条导引方式,采用无轨的导航方式。同时,国内外学者对不同原理的无轨导航方式进行了深入研究,并取得了良好的应用效果[2-6]。这些方式大致可以分为两类:基于信标的无轨导航和基于航迹推算的无轨导航。其中,基于信标的导航如激光导航、视觉导航等,局部定位精准,但存在实时性和环境适应性不够及易受光线、粉尘因素影响等问题;基于航迹推算的导航多使用IMU(惯性测量单元)或基于编码器的里程计系统定位,无需依赖外部环境,但是会随时间累积测量误差,无法长期单独使用。针对上述问题,本文结合使用两类定位方法,使用多传感器融合算法弥补两者各自缺点,提高定位精度。
此外,针对全方位AGV的运动模型,本文提出了一种使用PID控制进行路径跟踪的算法,并通过实验验证了算法的可靠性。
1 运动学分析
基于麦克纳姆轮的全方位AGV多采用四轮对称布置,如图1所示。

图1 全方位AGV轮系结构简图
麦克纳姆轮轮毂轴线和辊子轴线夹角为α(本文中α=45°)。点or为车体的中心,并以此为原点建立车载坐标系Σor。AGV在坐标系Σor的位姿为Pr=[xryrθr]T,其运动学公式可以表示为:
(1)

(2)
如图1所示,AGV在世界坐标系Σoq的速度可以通过下式进行转换:
(3)
式中:R(θ)为坐标系Σor到坐标系Σoq的坐标变换:

(4)
在车载坐标系下,由式(1)可以求得移动机器人的逆运动学公式:
(5)
2 导航系统设计
2.1 多传感器融合定位

(6)
然而,单独使用基于编码器的里程计进行定位时,由于AGV机械加工过程中的固有缺陷,或受路面打滑等外界因素影响,产生较大的瞬时偏差,且这些偏差会随着式(6)的累积求和不断累加。以此坐标作为定位信息进行导航,容易造成车体向某一方向偏移。所以,需要使用其他可以感知外界环境的传感器对上述定位结果进行校正。
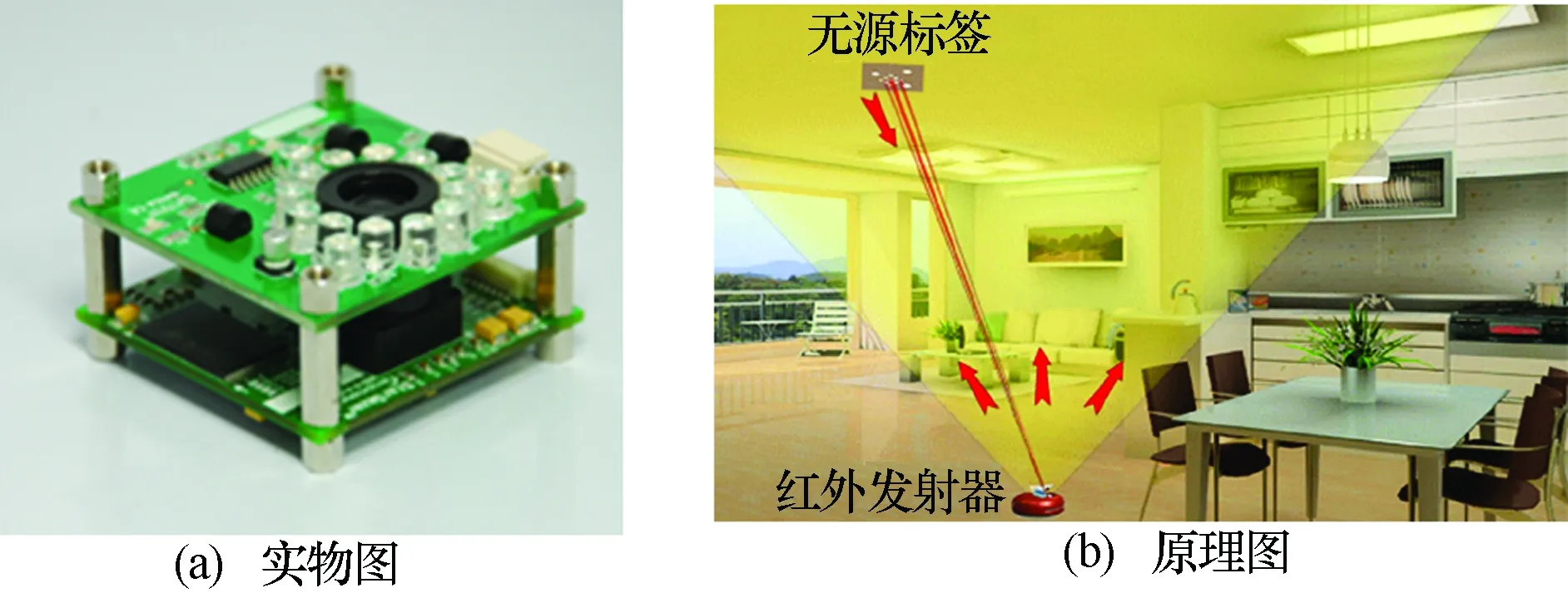
图2 红外图像传感器实物及工作原理

(7)
上述红外定位的方式可以用来消除编码器进行航迹推算造成的误差。考虑到StarGazer的定位可能受到其他红外设备的干扰,如室内的红外监控器,造成检测的错误,所以不能直接使用StarGazer的定位结果取代编码器航迹推算出的位姿。需要采用具有较强鲁棒性的多传感器融合算法,对二者数据进行滤波,得到局部校正的结果。本文使用卡尔曼滤波[7-8]作为融合两种传感器的方法,滤波方法表述如下。
系统的状态方程和观测方程为
(8)
式中:A为状态转移矩阵;B为控制矩阵;H为观测矩阵;wk-1是系统噪声;vk是观测噪声。状态变量选取为:
X=[xyθ]T
(9)
输入变量选取为
u=[vxvyωz]T
(10)
输入变量由里程计系统确定。第k时刻对k+1时刻的预测值表示为:
(11)
其中,
A=I3×3
(12)
控制矩阵B定义为:
B=ToI3×3
(13)

(14)
式中:Zk+1是k+1时刻的实际测量值,测量值选用StarGazer的测量值[x(s)y(s)θ(s)]T;观测矩阵Hk+1取为单位阵I3×3;Kk+1是k+1时刻的卡尔曼增益,通过式(15)得到,其中的P(k+1|k)是k时刻对k+1时刻的预测误差协方差矩阵。
(15)
P(k+1|k)=APkAT+Q
(16)
式中:Q为过程激励噪声协方差矩阵,R为观测噪声协方差矩阵,均为对角阵,分别由编码器和StarGazer的测量误差确定;Pk为k时刻状态变量的误差协方差矩阵。最后,k+1时刻的误差协方差矩阵通过式(17)更新。
Pk+1=(I-Kk+1Hk+1)P(k+1|k)
(17)
经过对里程计航迹推算结果进行线性预测,对齐StarGazer的测量周期Ts,系统每隔Ts使用卡尔曼滤波进行一次传感器融合,其余时刻使用里程计系统以上一次的融合结果为新的初始位姿,单独进行航迹推算,得到每一时刻AGV的定位[xy]T和偏航角θ。
经过多传感器融合,不仅可以消除里程计系统的累积误差,还提高了单独使用StarGazer时的定位频率。在保证实时性的前提下,减小了外界环境对定位系统的影响,提高了定位系统的鲁棒性和稳定性。
2.2 路径跟踪
AGV通过定位和融合算法得到自身在世界坐标系下的实际位姿[xyθ]T,取距离AGV几何中心最近的可微点[xpyp]T作为目标点,如图3所示。图中es、ed和eθ分别表示实际位姿与期望位姿的前向偏差、横向偏差和角度偏差。

图3 路径跟踪示意图
(18)
则根据式(5)可以得到4个麦克纳姆轮的速度为:
(19)
3 实验与分析
本文全方位AGV的机械设计图和实物图如图4所示。

图4 全方位AGV机械设计图与实物图
AGV控制系统结构组成如图5所示,选用固高嵌入式运动控制器作为核心控制器;使用编码器反馈数据和StarGazer红外定位传感器采集到的信息进行传感器融合实现定位和导航;避障传感器用于应对突发情况,保证运行安全;无线手柄用于对AGV进行手动遥控,方便调试和进行紧急控制。

图5 AGV控制系统结构图
使用本文中的卡尔曼滤波对StarGazer和里程计系统的数据进行融合,使用路径跟踪算法对6 m × 4 m的圆角矩形轨迹进行跟踪。实验结果如图6所示,单独使用里程计系统由于定位累积误差过大,无法完成跟踪。图6(a)的点集为进行滤波前单独使用StarGazer进行跟踪的结果,可以看出跟踪效果精度较低,且出现很多间断点和突变点,这是由于红外干扰造成的检测失效;图6(b)的点集为进行数据融合后得到的结果,轨迹平滑连续,更加接近期望的轨迹。

图6 卡尔曼滤波前后路径跟踪效果对比
经过测试,在0.3 m/s的速度下,AGV自动导航的行驶精度可以达到10 mm,且没有位姿检测突变点。最后,对上述算法的运行效率进行了测试,系统进行定位和路径跟踪的频率可以达到15 Hz,满足物流仓储对AGV导航精度和实时性的需求。
4 结束语
本文使用卡尔曼滤波对两种不同机理的传感器进行了数据融合,提出并验证了基于PID控制的全方位AGV的路径跟踪算法。实验证明,融合算法弥补了两种传感器的缺陷,提高了定位精度,滤波器模型可拓展应用于其他种类的定位传感器的融合;路径跟踪算法可靠、实时,具有很高的行驶精度和稳定性,达到了实际应用的要求,离散PID控制器适用于其他结构的全方位AGV的导航控制。
另一方面,由于本文采用原始的卡尔曼滤波模型,对环境中噪声变化的适应能力不够。所以,在后续工作中,将对本文的卡尔曼滤波模型进行改进和优化,提出一种自适应的融合定位算法,实时调整模型的激励噪声协方差矩阵和观测噪声协方差矩阵,进一步提高全方位AGV的定位与导航精度。
