一种基于离心机试验辨识惯导平台误差系数的方法
2018-02-03许永飞张士峰
许永飞,张士峰
一种基于离心机试验辨识惯导平台误差系数的方法
许永飞,张士峰
(国防科技大学 航天科学与工程学院,长沙 410073)
针对离心机试验中惯导平台误差系数辨识问题,提出了一种基于谐波分析辨识误差系数的方法。首先,根据惯性器件误差模型推导了离心机试验下陀螺和加速度计的输出方程,其输出由各阶谐波分量构成。然后通过傅里叶分析得到各项谐波的幅值。最后根据谐波幅值与各项误差系数之间的关系反解得到各项误差系数。仿真结果验证了方法的有效性。
惯导平台;离心机试验;误差系数辨识;傅里叶分析
精度是弹道导弹最重要的战技指标,弹道导弹的毁伤效果与精度的平方成正比,当精度提高10倍时,毁伤效果可以提高100倍。有很多因素会影响弹道导弹的精度,如弹上的导航设备——惯导平台的工具误差、导弹采用的制导方法引起的误差、地球引力场模型带来的误差、大气扰动误差等,在这多种多样的误差因素中,惯导平台工具误差起最重要的作用。研究结果表明:约有60%~80%的命中误差是由惯导平台工具误差造成的[1]。为了有效提高弹道导弹的命中精度,需要设计合理的试验来辨识惯导平台的各项工具误差系数,从而对导航结果进行补偿。目前,关于利用地面试验来辨识惯导平台误差系数的研究已比较多,形成了静态多位置法[2-3]和连续翻滚法[4-5]这两大类方法。这两类方法大都是在1重力场下进行的,受到外施加速度大小的限制,在这样的环境下与加速度二次方、三次方等相关的误差系数的激励较小,导致这些误差系数的辨识精度不够理想,这成为惯导平台误差系数辨识中的难点问题[6]。因此,为了进一步提高惯导系统的导航精度,需要设计高过载环境下的试验来辨识惯导平台中与加速度高次方相关的误差系数。离心机通过旋转能够提供比较大的向心加速度,研究基于离心机试验的惯导平台误差系数辨识方法,从而精确辨识出1重力场试验无法辨识的误差系数,对于进一步提高惯导平台的导航精度具有重要意义。
文中提出了一种适用于离心机试验的惯导平台误差系数辨识方法。具体来讲,首先采用傅里叶变换对加速度计和陀螺仪输出进行处理得到各阶谐波的幅值,然后根据谐波幅值与误差系数之间的关系计算得到各项误差系数。仿真结果表明,采用该方法能够精确地辨识出惯导平台的各项误差系数。
1 相关坐标系与数学模型
1.1 基本坐标系与转换关系
为了精确计算惯导平台受到的外施加速度,在离心机试验中需要用到下面这些右手直角坐标系:
1)导航坐标系(n系):将原点选在平台基座中心,n轴位于当地水平面内且平行于东向,n轴位于当地水平面内,指向北,n轴由右手法则确定,事实上n系取为“东-北-天”坐标系。
2)平台坐标系(p系):原点位于平台中心,x轴平行于加速度计的敏感轴;p轴位于,加速度计敏感轴确定的平面内并与p轴垂直;p轴由右手法则确定。
3)加速度计坐标系(a系,=,,):原点在加速度计中心,各坐标轴分别平行于加速度的输入轴、自摆轴轴、输出轴轴。根据前面的定义可以看出系与系平行;系与p系之间存在1个不对准角;系与p系之间存在2个不对准角。假设不对准角均为小角度,根据小角度假设理论,有:
式中:3表示3阶单位矩阵;py,pz,θ分别表示三个不对准角。

5)离心机主轴坐标系(t系):原点位于离心机主轴轴线与转臂轴线的交点,t轴的指向与离心机转臂方向一致,t轴在离心机转臂旋转平面内与t轴垂直,t轴由右手法则确定。t系随离心机一起旋转。初始时刻假设初t系与n系各坐标轴指向一致。
6)离心机反转平台坐标系(d系):原点位于离心机反转平台中心,各坐标轴的指向与t系中各轴的指向一致。d系是一个动系,随反转台一起旋转。
7)平台基座坐标系(r系):平台基座置于反转台上,r系原点在基座中心,各坐标轴分别平行于d系相应的坐标轴。
通过三个框架的旋转,可以使p系与r系平行,二者之间的转换关系为:
1.2 外施加速度的计算
在计算外施加速度之前,给出各坐标系的坐标原点之间的相对位置关系,具体如图1所示。
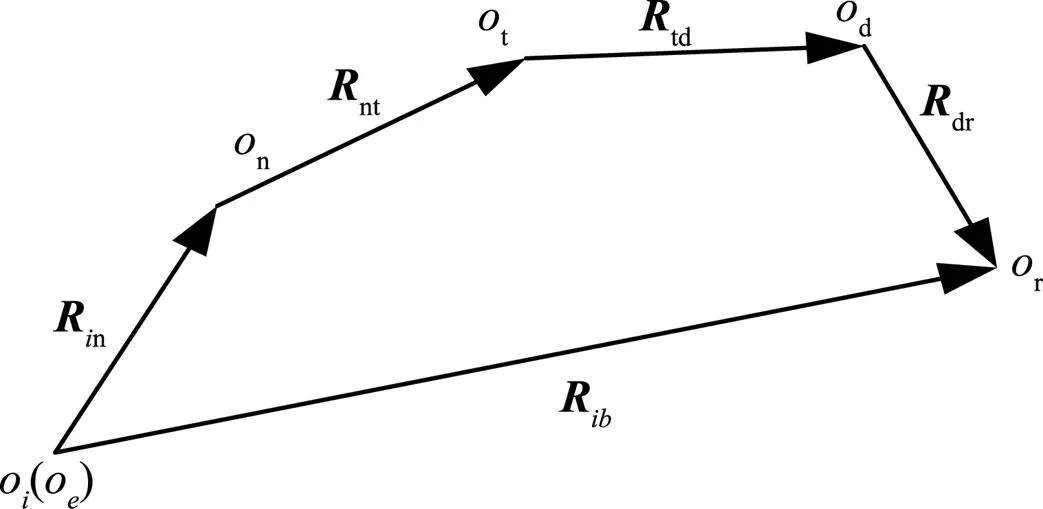
图1 坐标原点之间的相对位置关系
根据相关运算法则,矢量在系下的二阶导数可以表示为:

式中:nt代表t系相对于n系的角速度;代表当地重力加速度。
假设离心机的角速度大小为ω,转臂的有效臂长为0,则平台受到的外施加速度在基座系下的投影为:

式中:D表示地球自转角速度沿n方向的分量;N表示地球自转角速度沿n方向的分量。可以看出外施加速度由三部分构成:一是重力加速度的作用;二是向心加速度的作用;三是平台运动与地球自转耦合产生的科氏加速度。
1.3 陀螺仪误差模型
根据参考文献[7],以陀螺仪为例,其误差模型可以写成:


1.4 加速度计误差模型
根据参考文献[7],以加速度计为例,其误差模型可以表示成:


2 误差系数辨识原理
2.1 加速度计误差系数辨识原理




其中:

(19)









2.1 陀螺误差系数辨识原理

外施加速度在陀螺各轴上的分量为:

由式(11)、(31)—(32)得到陀螺的输出为:


3 仿真分析
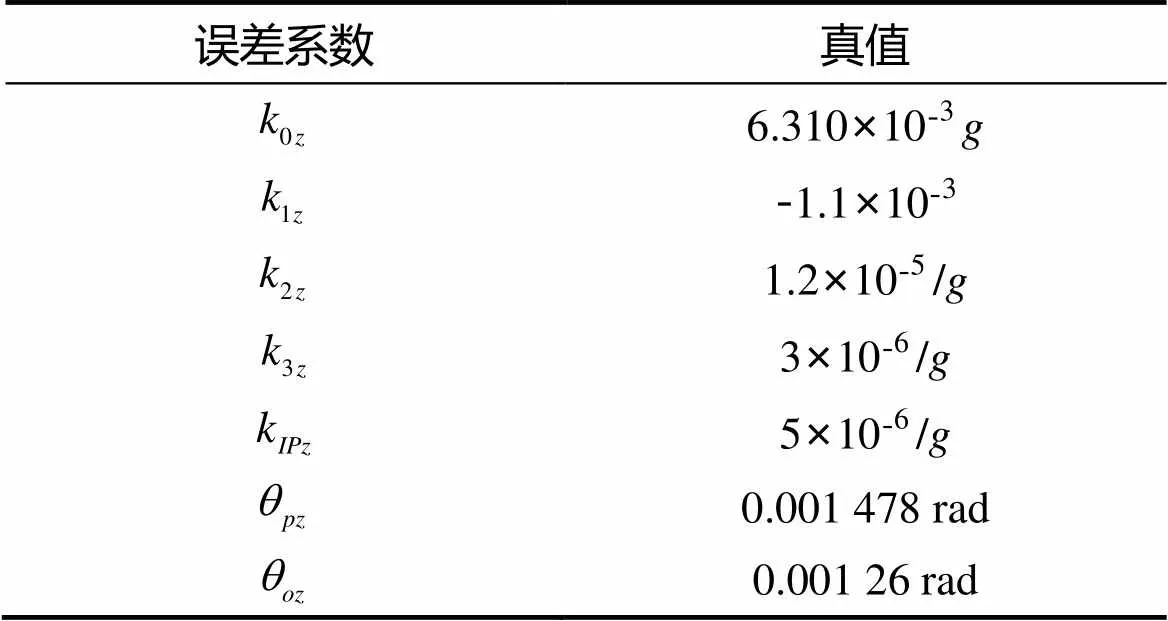
表1 加速度计各项误差系数真值

表2 各项谐波的幅值
由表2可以得到:

将上面的计算结果与误差系数的真值对比可以看出,采用文中提出的方法能够很好地辨识加速度计各项误差系数且具有很高的精度。

表3 陀螺误差系数辨识结果
从表3中可以看出,采用文中提出的方法可以辨识陀螺的各项误差系数,且具有很高的辨识精度。
4 结论
针对基于离心机试验来辨识惯导平台各项误差系数的问题,提出了一种基于傅里叶分析计算各项误差系数的方法。该方法可以辨识加速度计与陀螺仪的全部误差系数,且具有很高的辨识精度。另外与传统的基于Kalman滤波的辨识方法相比,该方法运算量小,简单易行。
[1] 张金槐. 远程火箭精度分析与评估[M]. 长沙: 国防科技大学出版社, 1995.
[2] 肖正林, 钱培贤, 徐军辉. 三轴平台快速自标定与自对准方法探讨[J]. 宇航学报, 2006, 27(2): 222-226.
[3] 曹渊, 张士峰, 杨华波, 等. 惯导平台误差快速自标定方法[J]. 宇航学报, 2011, 32(6): 1281-1287.
[4] CAO Y, CAI H, ZHANG S F, et al. A New Continuous Self-calibration Scheme for a Gimbaled Inertial Measurement Unit[J]. Measurement Science and Technology, 2012, 23(1): 015103.1-12.
[5] 丁智坚, 蔡洪, 杨华波, 等. 浮球式惯性平台连续翻滚自标定自对准方法[J]. 国防科技大学学报, 2015, 37(3):148-154.
[6] WANG H G, WILLIAMS T C. Strategic Inertial Navigation Systems-high-accuracy Inertially Stabilized Platforms for Hostile Environments[J]. IEEE Control Systems, 2008, 28(1): 65-85.
[7] Frazier J. Hellings. Application of Extended Kalman Filtering to a Dynamic Laboratory Calibration of an Inertial Navigation System[R]. AD763718, 1973.
[8] 唐江河, 付振宪, 邓正隆. 基于灵敏度分析的惯导平台参数分步辨识方法[J]. 宇航学报, 2008, 29(6): 1845- 1851.
A Method for Identifying Error Coefficients of Inertial Navigation Platform in Centrifuge Test
XU Yong-feiZHANG Shi-feng
(College of Aerospace Science and Engineering, National University of Defense Technology, Changsha 410073, China)
In allusion to identification of error coefficients for inertial navigation platform in centrifuge test, a method based on Fourier analysis was proposed. Firstly, output equation of gyro and accelerometer in centrifuge test was derived according to the error model for inertial device. The output was composed of different order harmonics. Then, the amplitude of each order harmonic was obtained by Fourier analysis. Finally, the error coefficients were obtained based on the relationship between harmonic amplitude expressions and error coefficients. The simulation results show that the proposed method is effective.
inertial navigation platform; centrifuge test; identification of error coefficients; Fourier analysis
TJ01;V448.12
A
1672-9242(2018)01-0001-05
10.7643/ issn.1672-9242.2018.01.001
2017-10-21;
2017-11-18
许永飞(1988—),男,河南禹州人,博士,主要研究方向为飞行器动力学导航与控制。
张士峰(1971—),男,河南辉县人,教授, 主要研究方向为飞行器总体设计。