基于表面肌电信号的膝关节动态力矩的BP神经网络估计
2018-02-03许全盛李世明季淑梅
许全盛,李世明,季淑梅
基于表面肌电信号的膝关节动态力矩的BP神经网络估计
许全盛1,李世明2,3,季淑梅1
1. 燕山大学 生物医学工程系,河北 秦皇岛 066004; 2. 中国海洋大学 体育系,山东 青岛 266100; 3. 鲁东大学 体育学院,山东 烟台 264025
目的:提出一种利用表面肌电信号估计膝关节动态力矩的BP神经网络模型方法。方法:5名受试者完成从徒手至90% 1RM的负重下蹲起实验,采集右侧股直肌、股内侧肌和股外侧肌的表面肌电信号,以滤波平滑归一化的表面肌电信号与膝关节角作为BP网络的输入,以逆向动力学计算获得的膝关节力矩作为期望输出,设计基于误差反向传播校正训练算法网络模型,用训练好的BP网络估计不同负重水平下蹲起产生的膝关节力矩。结果:1)网络中间层节点数为6,以30% 1RM负重时股直肌、股内侧肌和股外侧肌的表面肌电联合膝角作为输入时网络性能达到最佳,其中,相同负重下测试数据的互相关系数和归一化均方根误差分别达到0.975和5.5%;2)负重增加时网络估计精度逐渐降低,均方根误差在90% 1RM时最大达到18.5%。3)BP网络很好地映射了肌电与膝力矩数值上的非线性关系,而膝角则在预测膝力矩变化趋势上起关键作用。结论:以表面肌电信号和膝关节角作为输入变量的BP神经网络模型方法是实现自然运动状态下肌肉人体膝关节力矩准确估计的有效途径,训练好的BP网络能适应中高强度以下的不同负荷和动作速度。
BP神经网络;表面肌电信号;膝关节力矩;估计
膝关节是人体最大、构造最复杂、参与运动最多,同时又极易受伤的关节,由于其位于人体两个最长的杠杆臂之间,运动时要承受比其他关节更大的载荷而极易受伤,当膝关节产生的主动力矩无法有效抵抗外负荷力矩时就会产生损伤,而要估计肌肉-骨骼系统所能承受的载荷必须依靠对肌肉力量的确定[17,20],因此,如何获取膝关节控制肌群产生的力矩大小对预防膝关节损伤非常重要,膝关节力矩估计一直是下肢力量训练与评估、运动损伤预防、肌电假肢设计等领域中一个备受关注的研究课题[6,13]。
目前,人体膝关节力矩主要通过多关节等动肌力矩测试仪直接测试[3,14],或者利用逆向动力学由足底向上反算膝关节力矩[9,10]等方法获得,但这些方法都无法用于膝关节力矩的实时监测。事实上,活体膝关节所发挥的力矩大小与其控制肌群产生的表面肌电信号(Surface Electromyography, sEMG)之间存在一种必然的、内在的因果联系,如果掌握了这个定量关系,便可以通过sEMG来实时、便捷地预测或估计膝关节力矩[11,18]。例如,有研究探索建立sEMG时域参数积分肌电(integral EMG, iEMG)与膝关节屈伸峰力矩之间的关系,发现等速向心运动中膝关节伸肌iEMG与伸肌峰力矩呈显著正相关。另有研究探索建立了股四头肌伸膝力矩与屈膝角度、股四头肌表面3个头之和的iEMG%之间的关系,得出了通过股四头肌表面3头之和的iEMG%和屈膝角度推测伸膝力矩的回归方程[1]。
针对关节力矩的估计或预测,目前研究中采用的方法主要包括各种回归模型、神经网络模型、支持向量机和其他一些机器学习方法[7,8,12,15,16,19,21-23]。模型输入通常包括sEMG信号、测力台数据、关节角度和角速度等,期望力矩输出可以通过等动力量设备[12,21]、力矩传感器[8,23]测量或通过逆向动力学模型[7,15,19]计算获得。线性回归方法计算简单,但肌电与力矩间的线性关系只是一种近似,模型的估计精度不高,参数难以调整,适应性较差[19]。近年来,随着人工神经网络理论的渐趋成熟,它所具有的学习能力、多输入并行处理能力、非线性逼近和容错能力以及自适应能力,使其在估计关节力矩时具备更高的可靠性、实时性与灵活性。其中,Song等[19]利用三层递归神经网络,以肱二头肌、肱三头肌和肱桡肌的表面肌电和肘关节角、角速度为模型输入估计肘关节的屈伸力矩。Liu等[15]利用BP网络模型预测人体蹲起跳和下蹲跳时髋、膝、踝的关节力矩,选择足底测力支撑时间、地面反作用力、重心位移、重心速度以及蹬地功率作为输入,需要测量和计算的参数较多。ARDESTANI等[7]将小波变换与前馈型神经网络结合,以足底三维测力和髋、膝、踝关节屈伸肌群的表面肌电作为小波网络输入,预测膝关节患者的不同步态模式的下肢关节的屈伸力矩。
然而,无论是线性回归还是神经网络模型,以往的研究主要集中在肌肉等长收缩和等动收缩下产生的关节力矩估计问题,期望力矩一般通过力矩传感器或CYBEX、BIODEX等动力量设备测试获得,而针对人体自然运动状态下,即对骨骼肌在非等长或非等动收缩状态时产生的关节力矩进行的研究并不多见。另外,自然运动状态下人体关节的负荷和动作速度往往是变化的,模型能否适应这种变化值得关注,而以往文献中少有这方面的报道。
本研究拟利用膝关节肌群的sEMG信号和膝关节运动学参数作为输入,以逆向动力学的计算结果作为膝关节力矩的期望输出,通过设计误差反向传播校正的BP(Back propagation)神经网络,建立人体在不同负重时完成下蹲起动作过程中sEMG和膝关节力矩的映射关系。由于膝关节周围有10多块肌肉包裹[7,8],使得小腿成为一个冗余的操作臂,各肌肉的收缩力对膝力矩的贡献不尽相同,如果将参与屈膝伸膝的所有肌肉的sEMG信号都输入回归或神经网络模型,势必造成信息的冗余,不仅增加模型计算负担,甚至会降低膝力矩的估计精度[7]。同时,由于膝角与膝力矩的变化趋势密切相关,对预测膝力矩贡献很大[22],而膝角速度和角加速度作为衍生变量更容易受到噪声的影响。因此,本研究选择对完成下蹲起动作起主要贡献的股直肌、股内侧肌和股外侧肌这3块大腿前群肌的sEMG信号和膝角信号作为输入,通过BP网络输出不同负重水平下的膝关节力矩,探讨人体自然运动状态下实现膝关节力矩实时估计或监测的有效途径。
1 研究对象与方法
1.1 研究对象
参加本研究的5名实验对象均为体育教育专业男性本科生志愿者,年龄20±0.95岁,身高1.77±0.04 m,体重68.1± 6.27 kg。受试者身体健康,均为右利手,实验前24 h未参与任何形式的剧烈运动,实验前均签署知情同意,由实验人员告知其实验流程。
1.2 研究方法
1.2.1 负重蹲起动作
有研究证明,足距、足尖方向、深蹲程度和视线都会影响受试者的发力情况,因此,本实验负重蹲起动作的准备姿势为将杠铃置于颈后,双手抓握杠铃,身体挺直,两眼平视前方,两脚与肩同宽,足尖外斜约15°,负重下蹲至最低点(深蹲膝角60°~70°)后紧接着起立还原。
1.2.2 最大力量测试
最大力量测试通常有直接测试和间接测试两种方法。直接测试是测试一个人一次能举起的最大重量;间接测试是使用较轻的重量进行多次重复,然后利用公式算出最大力量(one-repetition maximum, 1RM)。与直接测试相比,间接测试的结果更为准确,过程也更为安全,因此,本实验采用McNeely推荐的间接测试法,对受试者进行负重蹲起动作的最大力量测试[4]。
测试方法如下:1)采用受试者能轻松重复5~10次的重量进行热身;2)休息2 min;3)重量增加10%~20%,尽量多的重复,受试者应该在2~20次间达到疲劳;4)利用公式计算:最大力量(1RM)=[(0.033×重复次数)×重量]+重量;其中,重复次数指蹲起重量的次数,重量指蹲起的重量,如果受试者的重复次数超过10次,则休息10 min后,将重量再增加10%~20%,再次测试。
1.2.3 负重蹲起实验
利用上述计算出的每个受试者的最大力量(1RM),在最大力量测试2周后,进行负重蹲起(0% 1RM、15% 1RM、30% 1RM、45% 1RM、60% 1RM、75% 1RM、90% 1RM)的测试实验,每级负重做3次,相邻2次蹲起间歇2~5 min,相邻负重之间间歇5~10 min,用心率遥测表监测,当心率达到正常水平时进行下一等级的测试[2]。对受试者的负重下蹲起实验进行运动学、动力学和肌电学的同步测试,下蹲起动作包括下蹲和起立两个阶段,期间膝关节伸肌群分别做退让式收缩(离心收缩)和克制性收缩(向心收缩)。
测试内容包括:1)采用美国产Motion Analysis运动分析系统对受试者的负重蹲起动作进行运动学数据采集,采样频率120 Hz,相机主光轴垂直于受试者运动平面距离 10 m,荧光标志点分别贴于受试者的股骨大转子、膝关节和外侧踝关节中心,获得矢状面的膝角、角速度及角加速度参数;2)采用国产JE-TB0810无线遥测表面肌电采集仪对受试者右侧股直肌(rectus femoris, RF)、股内侧肌(vastus medialis, VM)和股外侧肌(vastus lateralis, VL)进行测试,采样频率1 000 Hz;3)采用国产JP6060测力台测量负重蹲起过程的足底三维力,采样频率1 000 Hz。
1.2.4 膝关节力矩的逆向动力学计算
韩语是韩国文化的一部分,韩国文化的传播与交流离不开韩语。韩语是韩国文化传播、交流以及发展的主要媒介,人们往往通过学习韩语来对韩国文化进行掌握与了解,从而认识韩国这个国家。
本研究负重蹲起实验中人体下肢肌肉在自然运动状态下完成随意动态收缩,包含加速和减速过程,力矩传感器不能准确测量关节力矩,只有在等长收缩或等速收缩时,力矩传感器才能直接测量关节力矩。因此,本研究采用逆向动力学方法计算膝关节力矩,将其作为神经网络预测模型的期望输出。在逆向动力学模型中,需要关节运动学(膝关节角、角速度和角加速度)、足底三维力和人体惯性参数3方面的数据,分别通过Motion Analysis运动分析系统和三维测力台测量获得,膝角速度和角加速度分别通过膝角信号的一次和二次微分获得。原始膝角信号难免夹杂一定噪声,而微分运算会放大噪声影响,因此,膝角信号先用截止频率为3 Hz的4阶巴特沃兹低通滤波器平滑,再对平滑信号进行微分获得膝角速度和角加速度[19]。最后,将有关数据输入牛顿-欧拉方程,计算出屈膝下蹲和伸膝蹲起过程中膝关节的净力矩,其数值为肌肉力矩、重力矩、运动产生的力矩以及地面接触力矩之和[5]。
1.2.5 sEMG参数提取
1. sEMG信号预处理:根据sEMG信号的频率分布,用通频带范围8~500 Hz的4阶巴特沃兹数字带通滤波器和50 Hz的陷波器,对原始sEMG信号分别进行带通滤波和滤除50 Hz工频干扰后全波整流,再将整流信号用截止频率为3 Hz的低通滤波器进行平滑获得sEMG信号的包络线[19]。
2. 数据降采样与归一化:将预处理后获得的sEMG包络线按摄像机拍摄频率120 Hz进行降采样,使其与膝关节角和逆向动力学计算力矩的数据长度相等,为避免零或极大数值,输入输出幅值都归一化为0~1的无量纲数,即将sEMG信号、膝角和膝力矩按受试者每次动作中的最大值归一化后作为BP网络的输入,再通过去归一化获得单位为N·m的膝关节输出力矩。
原始sEMG信号及按上述方法处理的结果如图1所示(以被试马××在30% 1RM负重时为例)。从信号振幅变化看,完成下蹲起动作时间在2 s左右,处理后的RM、VM和VL 3块肌肉的sEMG信号包络线中间附近都有一极小值点,以此为分隔点,左右两侧的肌电信号分别对应下蹲和起立两个过程,肌电包络线序列还需按膝角和膝力矩的时间分辨率降采样后再输入BP网络模型进行训练,肌电信号降采样后同时起到降低网络训练时间的作用[7, 19]。

图1 本研究原始sEMG信号及其滤波、整流、包络线提取图
Figure 1. Raw sEMG Signal and Its Filtered Rectified Version and Envelope
注:左侧为原始sEMG,右侧为归一化的整流滤波信号(蓝)及其包络线(红);从上至下依次为股直肌RF、股内侧肌VM和股外侧肌VL。
1.2.6 BP网络建模与性能评价
1. 网络参数选择:初始输入权重、输出权重和阈值参数随机选取,初始值不同得到不同的均方根误差值(RMSE),网络激励函数采用Sigmoid函数。
2. 学习算法选择:网络训练选择Levenburg-Marquardt(LM)算法[7,15],根据设定的误差水平随机选取受试者数据对网络进行训练,调整参数,直至输出满足误差要求,再用训练好的网络模型测试其他受试者的数据。LM算法作为反向传播(back propagation, BP)训练方法,其快速收敛特性非常适合中等规模的网络,可用公式(1)描述。其中,ω神经元连接权重和偏置向量,是包含关于权重的网络误差的一阶导数的雅克比矩阵,为网络误差向量,是单位矩阵,是尺度因子,缺省值设定为0.01。BP网络训练包括信息的正向传播和误差的反向传播两个过程。正向传播中信息从输入层经隐含层到输出层,经激励函数运算后得到输出值,将与期望值比较的误差反向传播,沿原连接通路返回,通过逐层修改神经元连接权值和阈值,减小误差,不断循环直到输出符合精度要求为止,从而建立输入输出参数的映射关系。
Δ=(JJ+)gJe(1)


上述1.2.4~1.2.6膝关节力矩的估计方法与步骤可用方框图总结如图3所示。

图2 膝关节力矩估计的BP网络结构图
Figure 2. BP Neural Network Structure for Knee Torque Estimation

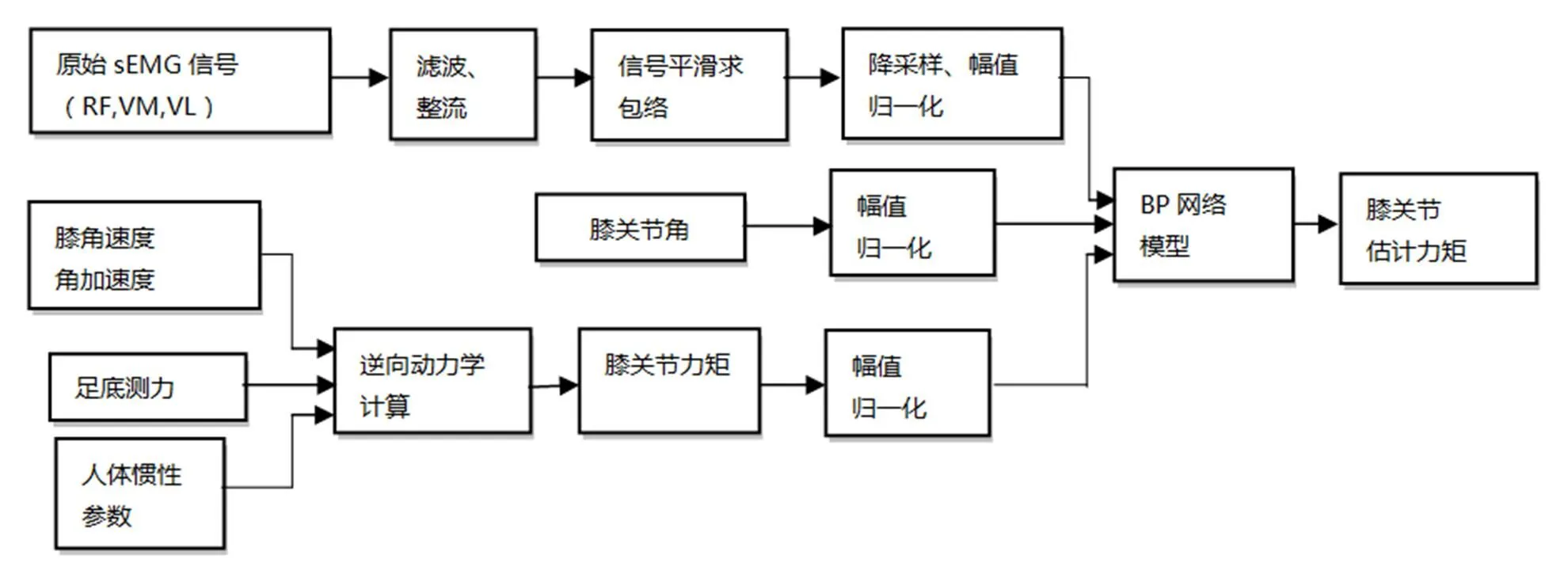
图3 膝关节力矩BP神经网络估计步骤示意图
Figure 3. Step-by-step Illustration of Knee Torque Estimation Based on BP Neural Network
2 结果与分析
2.1 BP网络结构选择
神经网络结构是影响模型预测精度和鲁棒性的重要因素。网络复杂度取决于中间(隐含)层节点的数目。隐含节点过少,模型复杂度不够会导致欠拟合;如果模型过于复杂导致过拟合,训练误差可能继续降低但测试误差将增大。因此,为使网络更具普适性,选择合适数目的隐含节点以避免过拟合和欠拟合非常重要。
图4是在输入为股直肌、股内侧肌和股外侧肌3通道sEMG信号及膝角时的膝关节力矩估计值与期望值间的归一化均方根误差NRMSE随不同数目中间层节点的变化。可见,训练样本NRMSE随节点数增加而快速减小,随后缓慢减小并趋于稳定,但测试样本NRMSE开始快速减小,随后略有增加或减小,波动显著,当中间层节点数在5~10之间得到极小值,而节点数超过6时训练样本的拟合误差不再明显降低,因此,本研究中间层节点数选择6。另外,设定误差水平后,网络迭代次数过多造成鲁棒性降低,通常训练在精度没有显著提高后停止(通常以相邻两次迭代结果估计值相对期望值之间的误差变化小于0.5%为原则[19])。
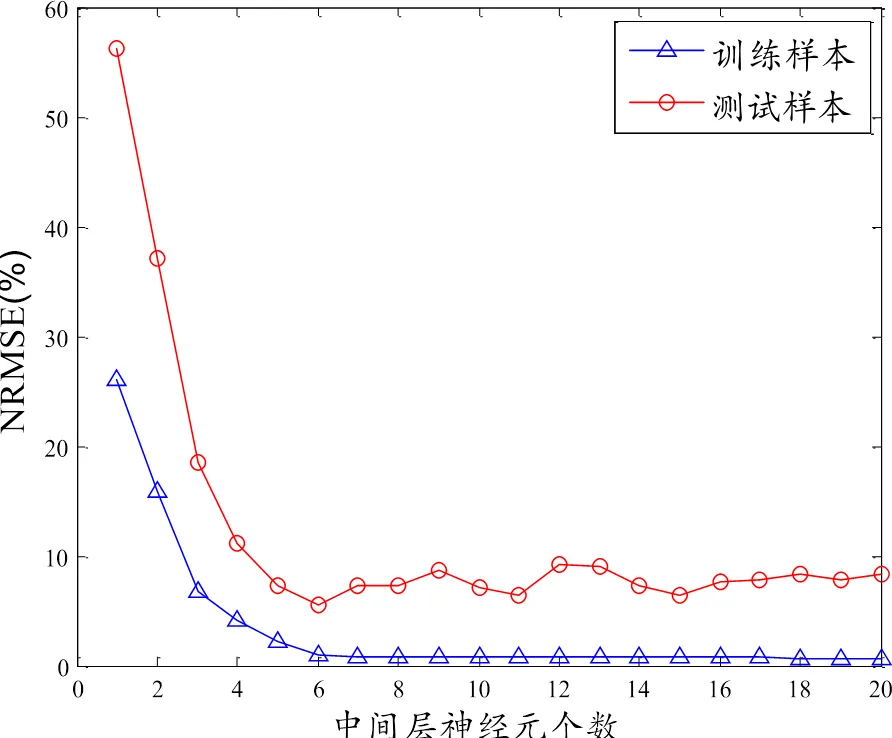
图4 训练和测试样本的归一化均方根误差随BP网络中间层节点数的变化曲线图
Figure 4. Normalized Root-mean-square Errors of Training Sample and Testing Sample With Respect to Middle Layer Neurons Number in BP Network
2.2 不同输入组合的膝关节力矩估计
将股直肌(RF)、股内侧肌(VM)和股外侧肌(VL)的sEMG信号和膝角θ作为BP网络的输入,观察不同输入组合时网络输出的膝力矩估计精度的变化。图5给出了30% 1RM的中等负重水平下,BP网络不同输入组合时的膝关节力矩估计结果。可见,无论是训练结果还是测试结果,膝关节力矩的变化大致都是一个先逐渐增大,至最大值后又逐渐减小的过程,分别对应屈膝下蹲(膝角从180°~70°)和伸膝起立(膝角70°~180°)两个过程,从整个下蹲起过程估计力矩和期望力矩的拟合情况看,单通道肌电输入的结果(RF或VM或VL,如图a)要差于两通道肌电的组合(RF和VM或RF和VL或VM和VL,如图5b),而3块肌肉的肌电组合时估计结果最佳(如图5c),但是,不同输入对训练样本的结果影响要明显大于测试样本,无论是RF、VM还是VL,采用单通道肌电联合膝角都能获得足够理想的膝力矩估计,而测试样本不同输入时的差异性要更加明显。这可能是由于RF、RM和RL是完成下蹲起动作贡献最大的3块肌肉,其sEMG信号之间虽然在幅度和频率特性上存在较大的相关,但同时又蕴含着一些互补的信息,如果在输入变量中去除一块或两块肌肉的肌电信号,则会导致膝力矩估计精度的下降。实际上参与膝关节屈伸的肌肉有14块之多[8],但在下蹲起动作中许多肌肉的贡献可忽略不计,如果模型中增加其他一些肌肉(比如小腿腓肠肌)的肌电输入,可能会进一步提高估计精度,但也可能效果并不显著。如果模型输入增加过多,则容易造成信息的冗余,不仅不能提高估计精度,反而大大增加计算负担,因此,本研究的sEMG数据只考虑了对完成动作起主要贡献的RF、VM、VL肌肉。
表1是不同输入时BP网络的膝力矩估计值与期望值的相关系数CORR和归一化均方根误差NRMSE。通常情况下,NRMSE反映膝关节力矩估计值与期望值在绝对数值上的接近程度,而CORR则反映估计值与期望值在变化规律上的趋同性高低,两个指标变化并不完全一致,实际工作中应结合两个指标对估计结果综合评价。由表1可见,训练样本在单通道肌电和膝角输入时NRMSE和CORR最差也分别能达到5.94和0.99,而测试样本在单通道肌电输入时NRMSE会超过15%,CORR也只是略高于0.95,估计精度可能不能满足实际需要,增加肌电输入后,估计精度明显提高,在RF、VM和VL的肌电信号都输入模型后,测试样本的NRMSE和CORR分别达到5.5%和0.975,而此时训练样本的NRMSE和CORR则分别达到0.999和1.15%的理想结果,这在图5c中看的非常明显。将图5c中膝力矩的期望值和估计值之间线性回归后的结果如图6所示,可见,训练样本的拟合直线与理想直线(估计值等于期望值)几乎完全重合,而测试样本的拟合直线也非常接近理想情况。

表1 30% 1RM负重下不同输入组合BP网络的膝关节力矩估计性能评价

Figure 5. Knee Torque Estimation Results of Network Model with Deferent Inputs Combination under 30% 1RM Load
注:左侧为训练结果,右侧为测试结果;从上至下网络输入组合分别为:( a )单通道肌电(股直肌)和膝角;( b )两通道肌电(股直肌和股内侧肌)和膝角;( c )三通道肌电(股直肌、股内侧肌、股外侧肌)和膝角。
2.3 负重下蹲起动作膝力矩与表面肌电和膝角的关系
进一步,可以观察训练好的BP网络的膝关节力矩输出和各通道肌电信号和膝角输入的函数关系(图7,图8)。从图7可见,BP网络具备良好的非线性映射能力,使其能利用sEMG信号估计膝关节力矩,其中,下蹲过程的非线性比起立过程更加明显,股直肌、股内侧肌和股外侧肌肌电与膝力矩的关系不尽相同,但大致都呈现正性相关变化。从图8可知,从直立姿势接近180°到下蹲至最低位置60°~70°以及从最低位置再起立至直立姿势两个过程中膝角与膝力矩都近似呈负性的线性关系,膝角大小对膝力矩变化趋势的预测起关键作用(为便于显示,图中膝角和膝力矩都是归一化值)。但下蹲与起立过程相应膝力矩并不完全相同,下蹲中膝力矩总体上大于起立过程,这是由于负重下蹲时,膝关节的原动肌-股四头肌离心收缩做退让性工作,随着膝关节屈曲膝角逐渐减小,股四头肌同时也被逐渐拉长产生更大的肌力矩以抵抗人体体重及负重产生的重力矩,避免人体及负重急速下降造成膝关节损伤,而起立过程膝关节原动肌-股四头肌向心收缩做克制性工作,由肌肉力学可知,在相同负重和膝角情况下,肌肉向心收缩产生的张力要小于离心收缩产生的张力。
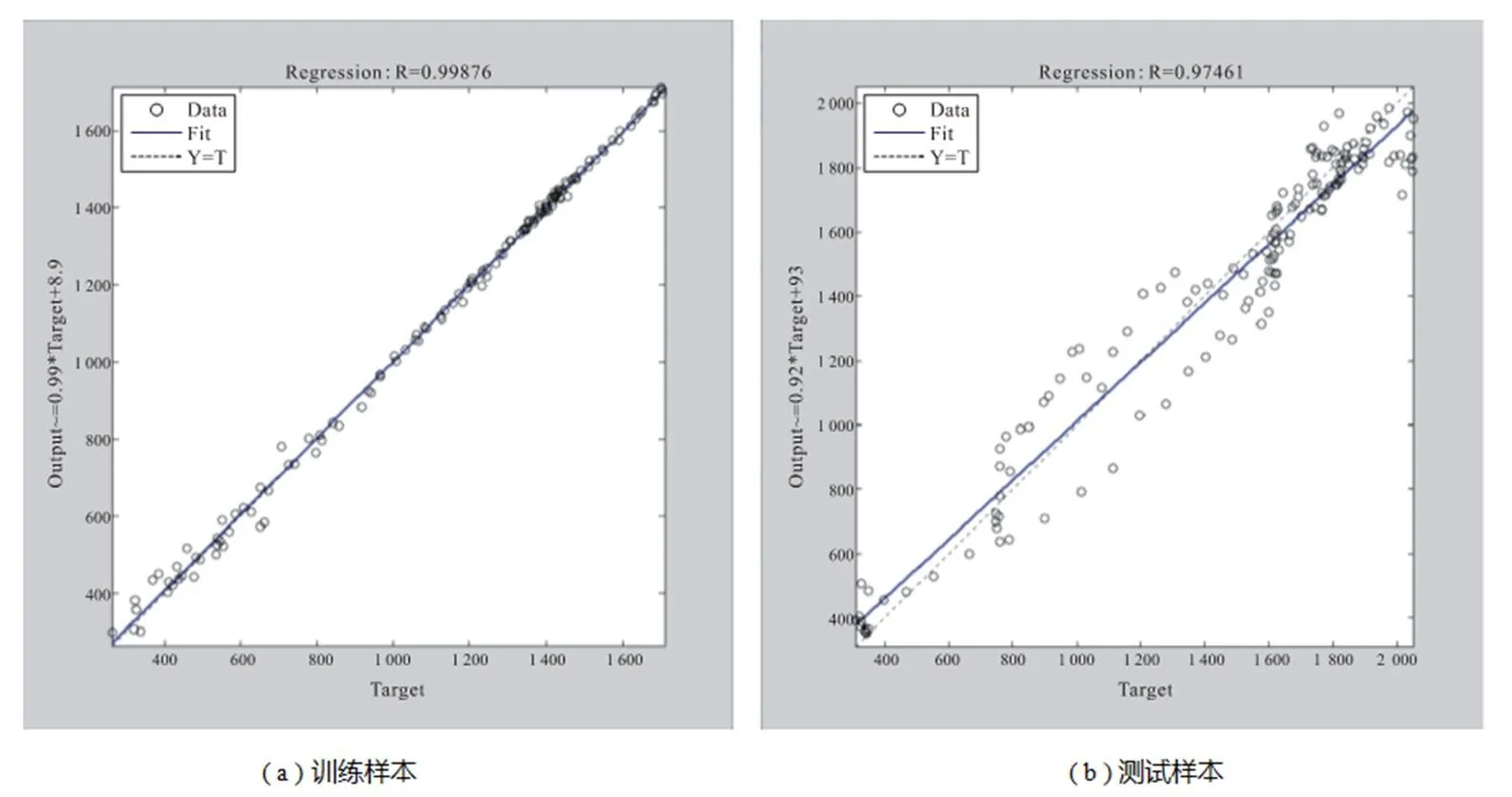
图6. 30% 1RM负重下RF、VM和VL肌电和膝角输入时膝力矩估计值与期望值的回归结果
Figure 6. Regression Results Between Knee Torque Estimation and Expectation with Inputs of sEMG Signals from RF, VM and VL Plus Knee Angle under 30% 1RM Load

图7 膝关节力矩与表面肌电信号的BP网络映射关系图
Figure 7. The BP Network Mapping of Knee Torque and sEMG Signals
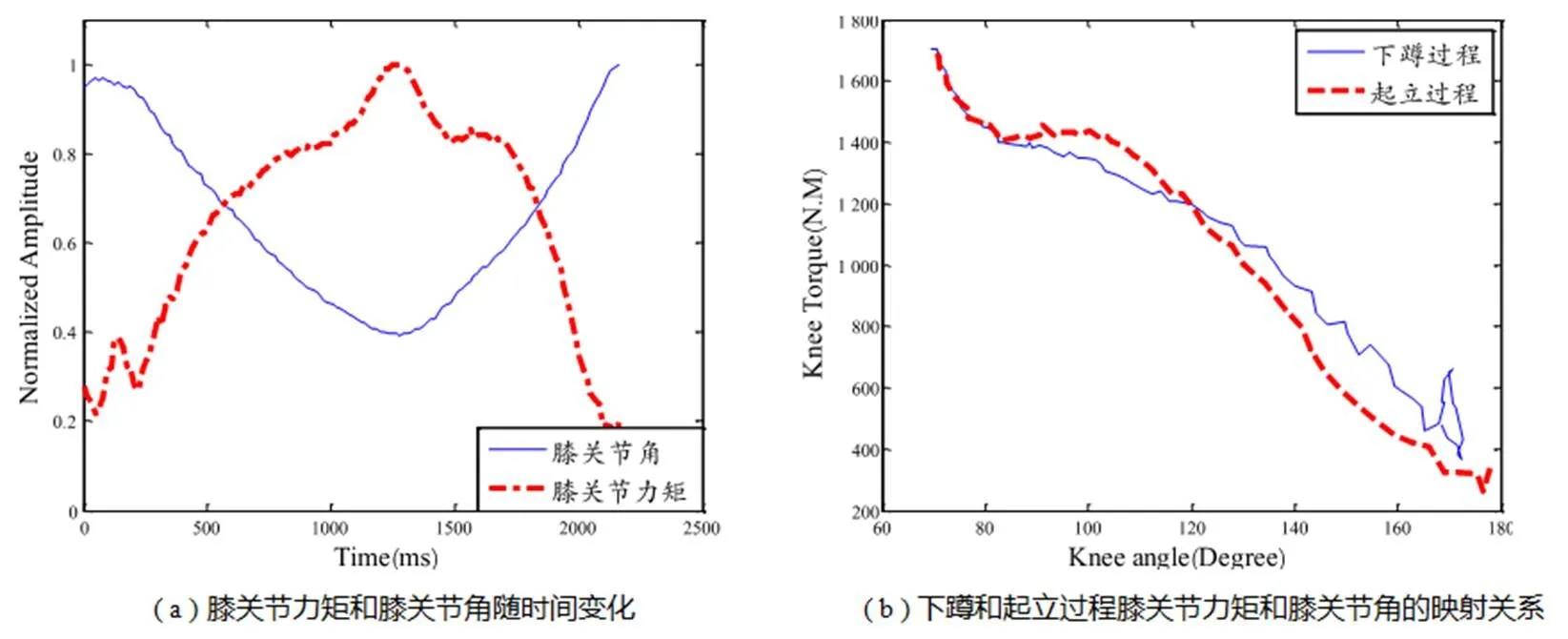
图8 膝关节力矩与膝关节角的BP网络映射关系图
Figure 8. The BP Network Mapping of Knee Torque and Knee Angle
2.4 不同负重水平时的膝关节力矩估计
BP神经网络输入端不包含负荷信息,只有肌电和膝角数据,神经网络应该具备应对不同负荷和运动速度的能力。为了检测训练好的BP网络适应不同负重水平和速度的情况(即从0% 1RM的低负重、快速蹲起到90% 1RM的高负重、慢速下蹲起),图9列举了采用30% 1RM的中低等负重水平以RF、VM和VL的表面肌电和膝角作为输入时所建立的BP网络估计测试样本在各级负重水平下的膝力矩的结果。各级负重水平下测试样本膝力矩估计与期望值的归一化均方根误差NRMSE、互相关系数CORR以及膝关节最大力矩Tmax,计算结果列入表2。

表2 不同负重水平下膝力矩最大值Tmax及测试样本膝力矩的估计精度指标
注:输入为30% 1RM负重时RF、VM和VL的表面肌电和膝角θ。
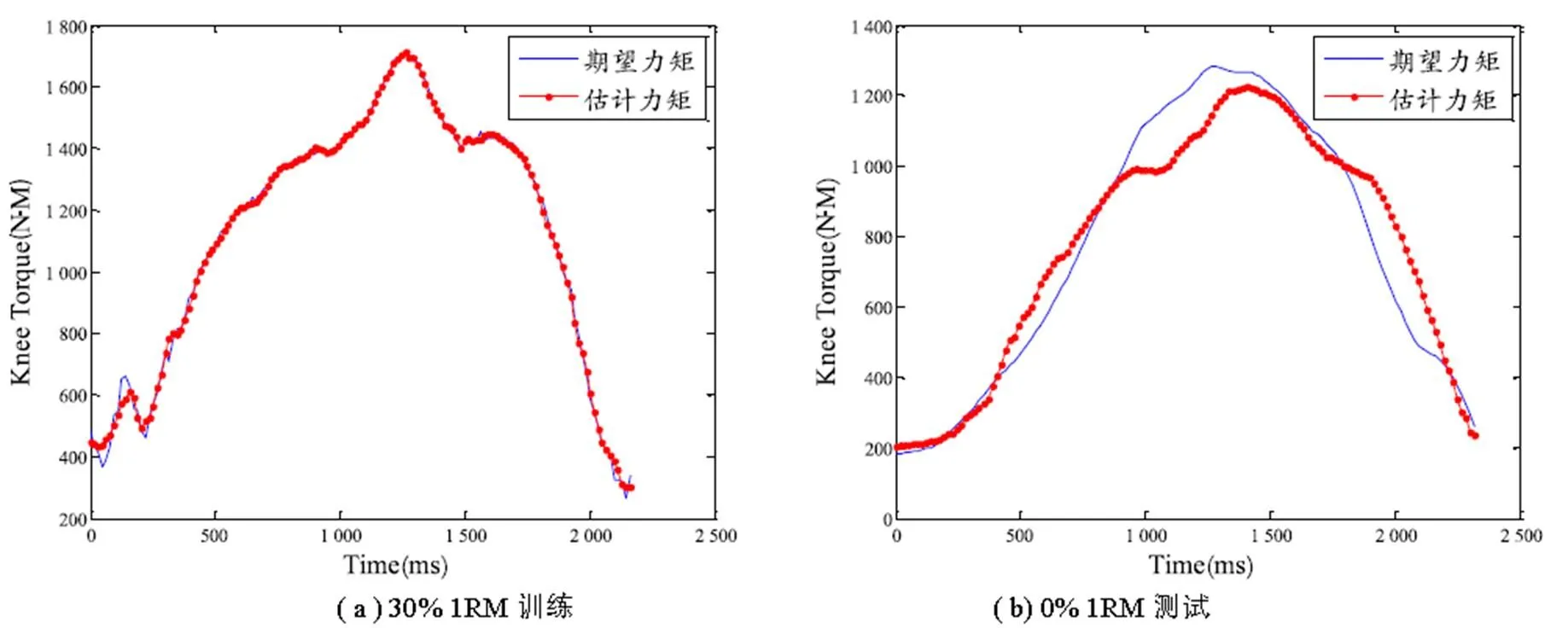

图9 不同负重水平时膝关节力矩估计结果示意图
Figure 9. Knee torque Estimation Results from BP Network Under Different Loads
比较各级负重水平下蹲和起立膝力矩变化范围可知(图9),膝关节力矩总体上随负重等级增加而增加,这是因为负重等级越高,需要克服的重力矩越大,导致相同大小的膝角下人体产生的膝力矩也越大。从图9观察估计力矩跟随期望力矩的变化情况可知,采用30% 1RM负重的训练网络估计相同负重水平的测试样本能够获得最高的精度,而在估计相邻的低负重水平(0% 1RM和15% 1RM)和中等负重(45% 1RM)水平时的结果要优于中高级负重水平时情况。从表2可知,在90% 1RM最大负重时NRMSE最大达到18.48%,CORR也降至最低值0.934,误差性能最差,模型估计精度已不能满足实际需要,说明在肌肉高强度收缩时BP网络的适应性仍然有待提高。
3 结论与建议
本研究以人体股直肌、股内侧肌和股外侧肌的表面肌电信号以及膝关节角作为输入,以逆向动力学的膝关节力矩计算结果作为期望输出,设计了基于Levenburg-Marquardt(LM)训练算法的误差反向传播校正的BP神经网络模型,对人体递增负重下蹲起动作产生的膝关节力矩进行估计,结果表明:
1. 网络中间层的节点数为6,以30% 1RM负重时股直肌、股内侧肌和股外侧肌的表面肌电联合膝角作为输入时,测试样本在相同负重下的膝力矩的估计精度最高,估计值与期望值的互相关系数和归一化均方根误差分别达到0.975和5.5%。
2. 股直肌、股内侧肌和股外侧肌某单块肌肉肌电作为输入时网络的估计精度要低于任意两块肌肉的肌电组合作为输入的情况,但两者都基本能满足实际工作中归一化均方根误差低于15%互相关系数大于0.95的最低要求。
3. 训练好的BP网络可以较好的应对不同负荷和运动速度。以发生频率最高的中低强度肌肉收缩的肌电数据(本研究采取30% 1RM)训练得到的网络具有较高的适应性,随着负荷水平增加,膝力矩的估计精度逐渐降低,在高强度收缩(75% 1RM负重以上)时网络性能下降明显。
4. 无论是下蹲时肌肉的退让式收缩还是起立时的克制性收缩,BP网络都能建立表面肌电与膝关节动态力矩间在数值上的非线性映射关系,而膝角与膝力矩呈近似的负性线性关系,在预测膝力矩的变化趋势方面起到关键作用。
综上所述,以股直肌、股内侧肌和股外侧肌的表面肌电信号和膝关节角作为输入变量的BP神经网络模型是实现自然运动状态下人体膝关节动态力矩准确估计或预测的有效途径,训练好的BP网络能够适应中高强度以下的不同负荷、不同动作速度和不同的肌肉收缩方式。
[1] 贺莹莹. 股四头肌等长收缩肌电动员比例和肌肉收缩力量的关系研究[D]. 北京:北京体育大学, 2010.
[2] 姜丽. 递增负重人体下肢关节力矩与sEMG关系的研究[D]. 山东:鲁东大学, 2014.
[3] 李世明. 运动技术诊断概论[M].北京:科学出版社,2014.
[4] 黎涌明,曹春梅.非稳定支撑面上自由负重练习的肌电分析[J].体育科学, 2012, 32(6): 39-43.
[5] 刘宇. 生物力学在运动控制与协调研究中的应用[J].体育科学,2010, 30(11): 62-73.
[6] 赵宏垚, 徐秀林. 人体膝关节的力矩参数[J]. 中国组织工程研究与临床康复, 2011, 2(4): 705-708.
[7] ARDESTANI M M, ZHANG X, WANG L,. Human lower extremity joint moment prediction: A wavelet neural network approach [J]. Expert Syst Appl, 2014, 41: 4422-4433.
[8] DAVID G L, BESIER T.. An EMG-driven musculoskeletal model to estimate muscle forces and knee joint moments in vivo [J]. J Biomech, 2003, 36:765-776.
[9] DISSELHORST-KLUG C, SCHMITZ-RODE T, RAU G. Surface electromyography and muscle force: Limits in sEMG–force relationship and new approaches for applications [J]. Clin Biomech, 2009, 24(3): 225-235.
[10] DOORENBOSCH C, HARLAAR J. Accuracy of a practicable EMG to force model for knee muscles [J]. Neurosci Lett, 2004, 368: 78-81.
[11] DOORENBOSCH C, JOOSTEN A, HARLAAR J. Calibration of EMG to force for knee muscles is applicable with submaximal voluntary contractions [J]. J Electromyog Kines, 2005, 15: 429-435.
[12] HAHN M. Feasibility of estimating isokinetic knee torque using a neural network model [J]. J Biomech, 2009, 40: 1107-1114.
[13] HOLTERMANNA A, MORK P J, ANDERSENA L L. The use of EMG biofeedback for learning of selective activation of intra-muscular parts within the serratus anterior muscle: A novel approach for rehabilitation of scapular muscle imbalance [J]. J Electromyogr Kines,2010, 20(2): 359-365.
[14] KINGMA I, LOOZE M, TOUSSAINT H,. Validation of a full body 3-D dynamic linked segment model [J]. Hum Mov Sci, 1996, 15:833-860.
[15] LIU Y, SHIH S M, TIAN S L,. Lower extremity joint torque predicted by using artificial neural network during vertical jump[J]. J Biomech, 2009, 42: 906–911.
[16] RAFIEE S, EHSANI H, ROSTAMI M. A PCA-assisted EMG driven model to predict upper extremities joint torque in dynamic movements [C/OL]. https://www.researchgate.net.publication/271492919.
[17] RANTALAINEN T, KLODOWSKI A, PIITULAINEN H. Effect of innervation zones in estimating biceps brachii force-EMG relationship during isometric contraction [J]. J Electromyogr Kinesiol, 2012, 22: 80-87.
[18] SHAO Q, BASSETT D, BUCHANAN T. An EMG-driven model to estimate muscle forces and joint moment in stroke patients [J]. Comput Biol Med, 2009, 39:1083-1088.
[19] SONG R, TONG K Y. Using recurrent artificial neural network model to estimate voluntary elbow torque [J]. Med Biol Eng Comput, 2005, 43:473-480.
[20] STAUDENMANN D, ROELEVELD K, STEGEMAN D,. Methodological aspects of sEMG recordings for force estimation-A tutorial and review [J]. J Electromyogr Kinesiol, 2010,20:375-387.
[21] SUN Y P, YEN K T, LIANG Y C,. An EMG-driven model to estimate knee joint moment [J]. Life Sci J, 2013, 10(2): 249-253.
[22] VERONICA J L, PARASURAMAN S, KHAN M,. EMG-Torque correction on human upper extremity using evolutionary computation [C]. IOP Conf. Series: Materials Science and Engine-ering, 2016: 1-9.
[23] ZIAI A, MENON C. Comparison of regression models for estimation of isometric wrist joint torques using surface electromyography [J]. J Neuroeng Rehabil, 2012, 8(56): 1-12.
Estimation of Human Dynamic Knee Torque Using Surface Electromyography Signals Based on BP Network
XU Quan-sheng1, LI Shi-ming2, 3, JI Shu-mei1
1. Yanshan University, Qinhuangdao 066004, China; 2. Ocean University of China, Qingdao 266100, China; 3. Ludong University, Yantai 264025, China.
Objective: The purpose of this paper is to propose a BP network based model to estimate dynamic human knee torque using surface electromyography (sEMG) signals inputs. Methods: Subjects were enrolled to participate the squat standing up experiment with increasing load during which the sEMG signals of their rectus femoris (RF), vastus medialis (VM) and vastus lateralis (VL) muscle of right leg was acquired. The inputs of BP network include preprocessed sEMG signals and knee joint angle. The output of network was the knee torque derived from inverse dynamics computation. The error back-propagation (BP) based neural network was designed and trained before used to estimate the knee torque of testing sample at different load when perform squat standing up. Results: The best performance of BP network can be achieved while the number of hidden layer nodes was take on 6 and sEMG signals from RF,VM,VL muscle at 30% 1RM together with knee joint angle were used as model inputs. The cross coefficient and normalized root-mean-square-error (NRMSE) between estimated and desired knee torque estimation was 0.975 and 5.5% respectively. However, the estimation accuracy of network decreased with load increasing with the worst NRMSE reached 18.5% while the load exceeded 90% 1RM. In addition, it was demonstrated that the nonlinear mapping between sEMG signals and knee torque could be well accomplished by BP network, while the variation trend of knee torque could be well predicted by knee angle input. Conclusion: BP network model with inputs of sEMG signals and knee joint angle could be an efficient approach to accurately estimate human dynamic knee torque produced in natural moving state, the BP network can be trained to adapt different muscle contraction intensity and speed.
G804.6
A
1002-9826(2018)01-0105-10
10.16470/j.csst.201801015
2017-07-03;
2017-12-21
秦皇岛市科学技术研究与发展计划项目(201602A135);山东省自然科学基金资助项目(ZR2013AL010)。
许全盛,男,博士,硕士研究生导师,主要研究方向为生物医学信号处理、运动生物力学,E-mail: xuquansheng @ysu.edu.cn。
李世明,男,博士,硕士研究生导师,主要研究方向为运动生物力学,E-mail:leesm0503@163.com。