Group tracking algorithm for split maneuvering based on complex domain topological descriptions
2018-02-02CongWANGChenGUOYuLIUYouHE
Cong WANG,Chen GUO,Yu LIU,You HE
Institute of Information Fusion,Naval Aeronautical and Astronautical University,Yantai 264001,China
In modern warfare,multiple targets with similar characteristics tend to form a complex target group in a small portion of airspace due to specific tactical objectives or other factors such as debris clusters from space vehicle explosions,aircraft formations aimed at low altitude penetration,warheads and a large number of decoys released during theflight of mid-range ballistic missiles.These targets,which can be called group targets,1,2have a small spatial distribution range,no significant difference in movement characteristics and a low relative velocity.
Group target tracking methods are different from traditional multi-target tracking methods in that the latter mainly involve the tracking of individual targets.If this method is applied directly to group target tracking,the results are poor.This is because certain targets need a point-track association to determine their parameters at the next moment in traditional association-filtering mode.If the association is incorrect,great error results;Similar movement states and tight grouping members make it much easier for mistakes to occur in this process.Therefore,current theoretical research focuses heavily on studying group targets as an extended target.
A Bayesian recursive algorithm for group targets is proposed in Ref.3The center mass of the group is tracked,and the extended state of the group is described by a random matrix.This can track the global motion of the group,but it neglects the impact of measurement error on the extended state.In the framework of an interacting multiple model(IMM)algorithm,4the heuristic approximation method is adopted to deal with the measurement error,and the effective tracking of the single group target is realized in Ref.5,but it does not consider the processing of the group target in maneuvering situations.On the basis of Ref5,the variational Bayesian iterative method in Ref.6is used to update measurements and improve tracking accuracy,but model conversion probability needs to be set beforehand,which is not consistent with complex group target motion patterns.In Ref.7,the Gaussian Mixture Probability Hypothesis Density(GM-PHD)filtering method is applied to group target tracking problems under linear conditions.In Ref.8,the Sequential Monte Carlo PHD(SMC-PHD)filtering method for group targets is proposed under partly resolvable conditions and achieved a good tracking results.Uncertain numbers of the group target and the data association problem can be solved by the PHD filtering algorithm,7–11however,the disadvantages of this algorithm are that it cannot distinguish which part of the hypothesis density propagation is caused by estimation uncertainty,and it is more complicated and not conducive to practical engineering applications.In Ref.12,the Markov Chain Monte Carlo(MCMC)particlefilter algorithm is used to estimate the group state,and the repulsive force model is proposed to describe the interrelationship among the targets in the group.The stochastic differential equation is adopted to establish the continuous time motion model and transformation model of the group structure.In Refs.13,14,the Box-PF algorithm15,16is used to estimate the motion centroid and the state of the extended target,respectively,based on circular and rectangular extended target models.After the group target is regarded as an extended target,recent research has mainly focused on model establishment and derivation of the relevant tracking algorithm;these primarily concern the track of the group center,the number of group members and the group shape.However,there has been negligible research on the tracking of individuals in the group.
With the improvement in detector resolution,it is necessary to effectively track every target in a group to meet today’s defense requirements.For example,when tracking an aircraft group composed of multiple types of tactical aircraft,individuals in the group must be tracked in order to grasp the overall battlefield situation.A maneuvering formation tracking algorithm based on different structure Joint Probabilistic Data Association(JPDA)17is proposed in Ref.18The point-track association problem of group targets is solved by modifying the split matrix decomposition rules of the traditional JPDA algorithm.The formation members are trackedfinely in the merging and splitting maneuvering states,but the stability of that tracking is poor.A refined tracking algorithm for steady,partly resolvable group targets based on Iterative Closest Point(ICP)is proposed in Ref.19,which has a good tracking results for individuals in group without formation changes;however it cannot solve the problem of group splitting or merging.
In this paper,we focus on the split maneuvering states of group targets.First,the characteristics of group splitting are analyzed.the time period of the split maneuvering and split form is then determined through the sliding window feedback mechanism,and a splitting model of group targets is established.Second,when dealing with a single outlier,a sequential least square method20is used to associate and reconstruct the outlier track in the sliding window.At the same time,when dealing with a group splitting into multiple smaller groups,the method of complex domain topology descriptions21is adopted to eliminate association problems brought by translation and rotation of target topology structure in the group.The effectiveness of the proposed algorithm is verified by the simulation results.
2.Group splitting maneuvering model
2.1.Split maneuvering analysis
The target measurement of the groupmprovided by a sensor at the timekare

where αmis the number of members in groupm.Group tracking consists of the three steps shown in Fig.1.If a formation is in steady state(the number of members does not change),thefirst step is more effective using conventional algorithms.19However,if the entire formation maneuvers,incomplete oneto-onecorrespondenceislikely to appearin thepreinterconnection of the divided groups.This results in not being able to continue on with subsequent tracking steps.Therefore,it is necessary to establish a reasonable and effective model for maneuvering groups in Step 1 and determine group states in order to accomplish accurate formation tracking.
Group splitting is a change of topology,and a single group can gradually split several times into two or more smaller groups(or single targets).The most significant changes to a group are the number of members and the volume of groups(or single targets)in the overall observation area before and after splitting.Group splitting has two classical methods:whole group splitting and the departure of single target from the group.Fig.2 shows two groups in the observation area,mandn,where splitting occurs.Groupm-1 represent subgroup No.1 divided from the groupm.Groupmsplits as a whole group:the number of groups increases with no growth in the number of single targets.Groupndemonstrates the second type of split::the number of single targets increases with no growth in the number of groups.On the actual battlefield,the two types of splitting often appear simultaneously.They are,however,researched and analyzed separately.

Fig.1 Main steps of group tracking.
In the process of tracking individual members,we mustfirst determine group to which they belong,and then create a pointtrack associated decision.For group split maneuvers,it is necessary to obtain the relationship between the new groups and the original for complete tracking group member interconnection.
For split type 1,by definition,the distances between the targets in the group are much smaller than the distances between the groups.As shown in Fig.2,subgroupm-1 and subgroupm-2 move away from eachother,and they are completely divided into two groups at timek.However,due to the similarity in velocity vector and position of overall group,subgroupsm-1 andm-2 at timekcan interconnect with groupmat timek-1 in pre-interconnection,theoretically.Therefore,this is regarded as the basis of split interconnection,which determines the affiliation of groups before and after splitting.
For splitting method 2,the distances between single targets and members of the original group are much larger than the distances between members in the group at timek.Single targets move away from the group trajectory,so their measurements are no longer internal.This situation cannot be detected in step 1 of group tracking since the number of groups within a partial observation area does not change significantly,so measurements of subgroupn-1 can only be tracked.
After the above analysis,the reduction in group members caused by splitting cannot be determined accurately in the group division and pre-interconnection stage.If a group is split,changes in group topology significantly reduce processing accuracy of steady group tracking algorithms through thefine interconnection of the members.Therefore,if maneuver occurs in this way,establishing an accurate and effective maneuvering model,and making timely judgments on the group status,will become an important basis for tracking the subsequent ownership of members.
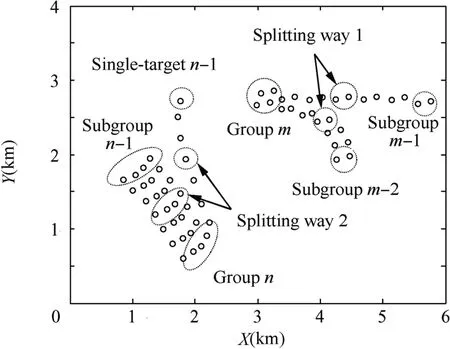
Fig.2 Group splitting.
2.2.Group split modeling and main steps
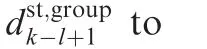
The splitting process is not an independent behavior at a certain moment,but a gradually changing process with time.A sliding window posterior feedback model is therefore adopted for group split modeling.Thisfirst establishes a sliding window with lengthl;the valuelshould be able to contain the total time of the split from start tofinish.During splitting,the distance between the two sub-groups is set aslsubgroup,maximum distance between group members is defined asd0,andl=1.2lsubgroup/d0.As shown in Fig.3,each small square represents a measurement set for the observation area at that time.If group splitting has been completed at timek,then theltime in the sliding window is considered a separate gradual process.Due to changes in the topology of the group,tracking of members is likely to be incorrect,so tracks within the sliding window should be re-determined by corresponding methods.
Supposing groupmis the group of interest,flow of the group splitting model is shown in Fig.4;the specific steps are as follows:
Step 1.All measurements Z(k)at time k are separated into pre-groups to obtain the number that can be interconnected successfully with groupm.If the number is 1,then continue to Step 2;If the number is not 1,then skip to Step 6;This step is used to determine whether the whole group is splitting.
Step 2.Search in vicinity of groupmto determine if there is a single target that has initiated successfully.If there is a single target meeting conditions,continue to Step 3;if not,skip to Step 5.This step is used to determine whether a single target is splitting off from the group.


Step 5.Groupmis determined to be in steady state,and point-track association with trackfiltering is used for member tracks according to the methods of progressing steady state groups;continue to Step 7.
Step 6.Groupmis determined to have undergone split maneuvering in previous moments l,and tracking in the sliding window is implausible.The track of members within the sliding window should be re-determined by related techniques;continue to Step 7.In this step,we use the sliding window reconstruction method needed in the next chapter.
Through the above steps,whether or not the group is splitting and which type of splitting has taken place are determined effectively.At the same time,the asymptotic interval of group splitting can be determined according to the sliding window,and all the tracks in the group splitting process are determined by methods in the next chapter.
Fig.3 Sliding window of split modeling.

Fig.4 Flowchart of group split modeling.
3.Track reconstruction in the sliding window
How to determine member tracks within the sliding window accurately and effectively when split maneuvering of a group is detected,has become a key technical link in tracking maneuvering formations.Before reconstruction,it is assumed that group track at timek-l+1 is the only credible track before formations split.
3.1.Single target outliers
3.1.1.Determination of single targets
It is necessary to determine the properties of outliers,which are members of the group that exhibit departure maneuvering behavior.According to commonflight tactics,outliers leave the group sideways and forward.For example,a member on the right side leaves the group on the right side,and other situations are nearly impossible to occur.Therefore,initial measurement of a single target that has been successfully started at timekis





The matrix obtained according to extrema necessary conditions of the multivariate function ∂I/∂aj=0

A polynomial is commonly used as the substrate,such that



3.1.2.Tracks of other group members
In order to avoid track interference caused by single target on other members,after obtaining all measurement sets Zstfor a single target,Zstis eliminated from measurement sets of the group at all times to obtain measurement sets Zgroupfor other members.Since the track structure of other members within the sliding window is more stable,the topology of group changes slowly and has the overall translation and rotation relationship of adjacent moments.In the section,measurement association and track reconstruction of members is achieved by using a complex domain topology description method.
Since group track at timek-l+1 is credible,after the elimination of single target,plausible tracks of other members and stability of formation topology are used to associate corresponding measurements one by one to form member tracks.Therefore,the track points of group members at timekare supposedly credible,and are used in conjunction with certain measurement points at timek+1.Due to the presence of clutter,the number of measurement points is larger than the number of group members.
Complex domain topology point description of group memberiat timekis




Thus,we can get complex domain topology description of group targets at timekandk+1

where ς is the amount of clutter at timek+1.


whereD(·)is the auto-covariance function.
Since all associations have been calculated between possible combinations at timek+1 and credible group topology at timek,the ones most similar to group topology are taken as echos of group targets the timek+1:


Fig.5 Complex domain topology description of tracks.
The measurement points of group members from timek-l+2 to timekcan be obtained one by one by using the above association method.The member tracks in the sliding window can then be reconstructed through thefiltering method for steady state groups.
3.2.Overall group division
When the whole formation is splitting,measurements are detected for two subgroups at timekby formation splitting model,but clutter in the measurement of subgroups cannot be to dealt with.In order to rebuild tracks within the sliding window,track points in the two sub-groups’members at timekshould be determined.
Due to the topology changes caused by group split maneuvering,it is impossible to obtain effective data on subgroup members from the information before timek.Thus,the group target grayfine track initiation algorithm22based on relative position vectors is used to initiate the two subgroups individually from 4 moments after timek.Track status of the two subgroups’members at timekcan be obtained by the initiated track of subgroups.




In order to coordinate the reliable relationship of two subgroups with high similarity,measurement association is selected according to the sum of the two sub-groups’similarity:

(2)If Num1=Num2,the number of the subgroups members is the same.If the number of members is small,the topologies of the two subgroups are easy to confuse,so it is necessary to use additional constraint conditions.
The sub-group distance attribute is fused to make an attribution decision by the association method using the preemptive mechanism.Suppose that χ possible corresponding set by the association and

Association problems brought by similar topology of the subgroups at adjacent times are solved effectively by adopting the above association attribution decision method with distance attributes of the subgroup centers.
The above association method obtains subgroup measurement information of divided groups from timekafterward,one by one.Measurement attribution decisions of divided formations in the sliding window is completed gradually.The track of subgroups within the sliding window can then be rebuilt by using the trackfiltering method of steady-state formations for each subgroup.
4.Simulations
In order to verify the performance and effectiveness of the proposed algorithm,1000 sets of Monte-Carlo simulations are used.The Group Tracking Algorithm for Split Maneuvering based on Complex Domain Topology Description(GTASMCDTD),Different Structure JPDA(DS-JPDA)and the classic multi-target tracking algorithm MHT-Singer model(using MHT for point-track association and the Singer method in filtering)are simulated compare and analyzefine tracking performance in multi-environment conditions.
4.1.Simulation environment
The sampling period of a radar is set atT=1 s.In order to compare and analyze different aspects of each algorithm’s groupfine tracking performance,three kinds of classical simulation environments are set up:
Environment 1.In order to verify the effectiveness of the proposed algorithm,the objective environment of sparse group maneuvering under cluttered conditions is simulated.In a sparse group,the distance between group members is generally at 600 m or 1000 m intervals.In radar view range,there is a steady state group consisting of nine members at the initial moment that form a straight line.The initial velocity(vx,vy),and acceleration(ax,ay)are set as(0 m/s,400 m/s),(3 m/s2,0 m/s2).Group members do separate maneuvering at a specific moment,which forms a group splitting scenario;the maneuvering time and parameters of each member is shown in Table 1.
In the simulation,the range of the radar horizon isx~ [-14000 10000]m,y~ [-15000 31000]m and the radar is at the origin point (0,0)of the coordinates.1000 bits of clutter in uniform distribution are generated at each moment in the radar view range.Radar directionfinding error σθ=0.2°,and ranging error σρ=20 m.The radar detection probability isPd=0.98.
Environment 2.In order to verify the performance of the proposed algorithm under partialy resolvable conditions,i.e.lower radar detection probability,Pd=0.85,and other simulation conditions are the same as Environment 1.
Environment 3.In order to verify the robustness through clutter and real-time performance of the proposed algorithm,the target environment of a group split maneuvering under different clutter density conditions is simulated.The group targets have Member IDs 4-9 in Environment 1,and other simulation parameters are the same as that environment.The group consists of 6 targets splitting into two subgroups:subgroup 1 and subgroup 2.Clutter is randomly set in two rectangles centered in the middle of each subgroup,and side length is 4000 m. λ1and λ2represent the amount of clutter in the two rectangles,respectively.The clutter values are shown in Table 2.

Table 1 Maneuvering parameters for group members(Environment 1).

4.2.Simulation results and analysis
In Environment 1,the initial group is composed of nine targets with group splits over time,as shown in Fig.6.Group splitting occurs three times:thefirst is a single-target outlier;the second is group splitting on the condition of Num1≠Num2;the third is group splitting on the condition of Num1=Num2.The three splits contains all the group splitting processes studied by this paper.
To both evaluate the performance of the algorithm effectively and track data accuracy in the project,the number of credible tracks18(The track ID always corresponds to the correct initial track ID)is measured statistically.In order to evaluate the reliability of tracking effectively,we define the Average Number of Credible Tracks(ANCT)as

where φ is the number of credible tracks,Ti(φ)represents the moment with φ credible tracks appearing in theiMonte-Carlo simulation,nmonteis Monte Carlo simulation times,β represents the number of times that there are α credible tracks appearing innmonteMonte-Carlo simulations,Tendis the total moments in the simulation, α ∈ {1,2,3,4,5,6,7,8,9},nmonte=1000,Tend=100.In Environment 1,the average numbers for credible tracks in the processing results of the three algorithms underPd=0.98 conditions are shown in Fig.7(a).
In order to analyze the tracking accuracy of the three algorithms,comparison curves are made by the position and velocity Root-Mean-Square Error(RMSE)of the credible tracks in process,as shown in Fig.8.
It can be seen from Fig.7(a)that the average credible tracks curve of the GTA-SMCDTD algorithm is significantly higher than the other two algorithms,and the overall performance is significantly superior.As the group splits in different ways at the moments of 24,50,and 75,corresponding to Fig.7(a),the number of credible tracks of the three ANCT curves in three maneuvering periods is significantly reduced.Since theGTA-SMCDTD algorithm has made corresponding measures for different split situations,the algorithm has good stability and low precision tracking error.At the same time,it can be seen from the slope of the three curves that the GTASMCDTD algorithm is the lowest,the DS-JPDA algorithm is the middle,and the MHT-Singer algorithm is the steepest.The whole stability of algorithm can be seen from entire slope of the curves.Since the MHT-Singer algorithm is focused on multi-target tracking conditions,it is prone to association error with group targets of similar motion states,so the tracking effect is poor.However,the DS-JPDA algorithm makes only an integral model of the group split,and does notfinecorrelate the target topology after splitting,so the performance of the algorithm is inferior to the GTA-SMCDTD algorithm.
Number λ1 λ2 1 0 1 2 1 1 3 1 2 4 2 2 5 2 3 6 3 3
Fig.8 shows the RMSE curve of the position and velocity of credible tracks in tracking progress.It can be seen from thefigure that the curve of GTA-SMCDTD algorithm is the lowest and has the highest tracking accuracy.The peak of the GTA-SMCDTD error curve is the smallest,and its curve is the most stable during the three split maneuvers;the whole error curve of DS-JPDA algorithm is higher than that of the GTA-SMCDTD algorithm,and the error curve of the MHT-Singer algorithm is much higher than that of the other two algorithms,signifying high instability.Therefore,the proposed algorithm has very high tracking accuracy and stability when compared with other two algorithms in a variety of splitting maneuvers.
In Environment 2,group targets are partly resolvable,which indicates decreased visual performance and a decline of radar detection probability.The influence of the lower detection probability on group tracking is shown in Figs.7(b)and 9.
Comparing Fig.7(b)with Fig.7(a),the number of average credible tracks for each algorithm when tracking under partly resolvable condition are significantly decreased,demonstrating that the decrease in detection probability has a large influence on the tracking results.The MHT-Singe algorithm cannot form a complete credible track.Although the ANCT of DS-JPDA is not reduced to 0,the probability of creating credible track is low.GTA-SMCDTD algorithm can still form an average of 4.4 complete credible tracks under these conditions,which is a decrease of 42.1%compared with the 7.6 credible tracks constructed in Environment 1.Therefore,the proposed algorithm has high tracking reliability under partly resolvable condition.
With the conditionPd=0.85,only two algorithms are simulated for the tracking accuracy since the MHT-Singer algorithm cannot form a credible track.Simulation results are shown in Fig.9.
Comparing Fig.9 with Fig.8,it can be seen that the error curves of the two algorithms are significantly increased and curve smoothness is reduced under the partly resolvable conditions.Tracking accuracy is lower because radar waves with lower probability make tracking more unstable.However,comparing the position and velocity RMSE of the two algorithms in Fig.9,it can be seen that the GTA-SMCDTD algorithm still has lower average error and smaller curve peak during group splitting.Therefore,the proposed algorithm has high tracking accuracy and stability under partly resolvable conditions.
In Environment 3,the effective tracking rate and algorithm time-consumption vary with the amount of clutter,as shown in Table 3.The GTA-SMCDTD algorithm has significant advantages over other two algorithms in effective tracking rate under all kinds of cluttered environments.This is especially the case with Number=5:the other two algorithms have almost no effective tracking while this algorithm can still have a 42.5%effective tracking rate.This is an indicator that the anticlutter ability and robustness of this algorithm is also very good.The DS-JPDA algorithm consumes the least time if the clutter is low.However,with an increase in clutter,the number of the feasible matrices of the JPDA algorithm increases exponentially.This greatly increases time consumption.While the GTA-SMCDTD algorithm is more stable,that stability also comes at the cost of time.Therefore,this algorithm has no significant advantage on time consumption,but is more stable.

Fig.6 Overall target situation.
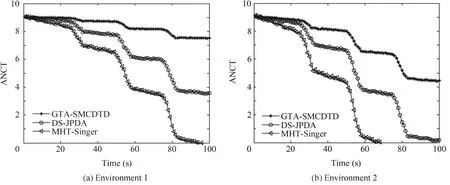
Fig.7 Average number of credible tracks.
Through the results of the three simulations above,we can see that,compared to the DS-JPDA algorithm that treats splitting as a moment,the GTA-SMCDTD algorithm regards group splitting as a gradual process over a period,which ensures the completeness of processed track information.In the process of determining trajectory in the sliding window,measured points are associated by effectively distinguishing single-target outliers and the overall split by using the corresponding group topology.This is in contrast to the DSJPDA algorithm,which still uses multi-target tracking to associate the attribution of measurement and does so less accurately.In addition,mutual position relationships in the group can be described effectively and the problem of rotation and translation can be solved by adopting the complex domain topology description method.Therefore,we can see from the above simulation results that the GTA-SMCDTD algorithm has significant advantages over both the DS-JPDA algorithm and MHT-Singer algorithm.

Fig.8 Position and velocity RMSE at Y axes(Environment 1).

Fig.9 Position and velocity RMSE at Y axes(Environment 2).

Table 3 Effective tracking ratio and runtime of the algorithms varied with respect to clutter(Environment 3).
In Environment 4,as shown in Table 4,the effective tracking rate of the algorithm changes with the number of initial group members and radar parameters.The GTA-SMCDTD algorithm has performs perfectly when radar precision is high,and tracking rates can reach 100%.With decrease in radar precision,the effective tracking rate also decreases.This is because the core of this algorithm is association by topology of the group members.The reduction of radar precision makes the position of the target unstable,increasing ambiguity of the topology structure.At the same time,with the same radar precision,a larger number of group members corresponds to a higher effective tracking rate.This is due to a more stable topology structure that results from having more group members that can provide additional relative topological information.Through simulation in this environment,it is resolved that the algorithm has better performance when either the radar precision or the number of group members is higher.

Table 4 Effective tracking ratio varied with radar parameters and number of initial group members(Environment 4).
5.Conclusions
Aimed at tackling thefine tracking problems of group maneuvering,a tracking algorithm based on complex domain topology descriptions is proposed that can be summarized by the following points:
(1)A group-target splitting model based on sliding window feedback is established that describes the process of splitting and divides it into two common split forms.This model can substitute ‘‘traditional group-oriented tracking” for ‘‘individual-oriented tracking” so as to achievefine tracking of individuals in group.
(2)The sequential least squares method is used to determine the single target outliers,and the complex domain topology description method is used to associate and align the members in the group,which effectively solves the tracking problem of interconnection between point and track for group members.
(3)Simulation results show that the proposed algorithm can effectively deal with thefine tracking problems caused by group splitting,and it has better tracking precision and stability than other methods.Under partly resolvable conditions with Pd=0.85,the average number of credible tracks is reduced by only 42.1%,and tracking accuracy and stability remain high.
(4)The algorithm has is robust against environmental clutter,and time-consumption is stable.
(5)The higher the accuracy of the radar or number of group members,the greater the tracking effectiveness.
Acknowledgements
This study was co-supported by the National Natural Science Foundation of China(Nos.61471383,61531020,61471379 and 61102166).
1.Dong RS,Geng ZY.Formation tracking of multi-vehicle systems.Asian J Control2015;17(6):1–7.
2.Dong RS,Geng ZY.Consensus for formation control of multiagent systems.Int J Robust Nonlin Control2015;25(14):2481–501.
3.Koch JW.Bayesian approach to extended object and cluster tracking using random matrices.IEEE Trans Aerosp Electron Syst2008;44(3):1042–59.
4.Zhu HY,Guo K,Chen S.Fusion of Gaussian mixture models for maneuvering target tracking in the presence of unknown crosscorrelation.Chin J Electron2016;25(2):270–6.
5.Fedmann M,Franken D,Koch JW.Tracking of extended objects and group targets using random matrices.IEEE Trans Signal Process2011;59(4):1409–20.
6.Orguner RU.A variational measurement update for extended target tracking with random matrices.IEEE Trans Signal Process2012;60(7):3827–34.
7.Yang JL,Peng L.Multiple extended target tracking algorithm based on Gaussian surface matrix.J Syst Eng Electron2016;27(2):279–89.
8.Lian F,Han CZ,Liu WF.Tracking partly resolvable group targets using SMC-PHDF.Acta Autom Sin2010;36(5):731–41[Chinese].
9.Granstrom K,Lundquist C,Orguner U.Extended target tracking using a Gaussian mixture PHDfilter.IEEE Trans Aerosp Electron Syst2012;48(4):3268–85.
10.Granstrom K,Orguner U.A PHDfilter for tracking multiple extended targets using random matrices.IEEE Trans Signal Process2012;60(11):5657–71.
11.Granstrom K,Orguner U.On spawning and combination of extended/group targets modeled with random matrices.IEEE Trans Signal Process2013;61(3):678–92.
12.Pang SK,Li J,Godsill S.Detection and tracking of coordinated groups.IEEE Trans Aerosp Electron Syst2011;47(1):472–501.
13.Petrov N,Gning A,Mihaylova L.Box particlefiltering for extended object tracking.Proceedings of the 2012 international conference on information fusion;2015.p.82–9.
14.Petrov N,Mihaylova L,Gning A.Rectangular extended object tracing with box particlefilter using dynamic constraints.In:Proceedings of the 2014 IET algorithms and applications conference on data fusion andtarget tracking;2014.p.1–7.
15.Li ZX,Liu JM,Li S.Group targets tracking algorithm based on box particle filter.Acta Autom Sin2015;41(4):785–98.
16.Gning A,Ristic B,Mihaylova L.An introduction to box particlefiltering.IEEE Signal Process Mag2013;30(4):166–71.
17.Zhu HY,Wang C.Joint track-to-track association and sensor registration at the track level.Digital Signal Process2015;41(1):48–59.
18.Wang HP.Research on multi-sensor formation targets tracking algorithm[dissertation].Yantai:Naval Aeronautical and Astronautical University;2012[Chinese].
19.Wang C,Wang HP,He Y.Refined tracking algorithm for steady partly resolvable group targets based on ICP.J Beijing Univ Aeronaut Astronaut2017;43(6):1123–31[Chinese].
20.Liu HB,Zhou T.Robust state estimation for uncertain linear systems with random parametric uncertainties.Sci China2017;60(1):1–13.
21.Song Q,Xiong W,He Y.A track alignment correlation algorithm based on topological description of complex numberfield.J Astronaut2011;32(3):560–6[Chinese].
22.He Y,Wang HP,Xiong W.Refined gray track initiation algorithm of group targets based on relative position vectors.Acta Aeronaut Astronaut Sin2012;33(10):1850–63[Chinese].
杂志排行

CHINESE JOURNAL OF AERONAUTICS的其它文章
- Multi-mode diagnosis of a gas turbine engine using an adaptive neuro-fuzzy system
- PHM with Aerospace Applications
- A critique of reliability prediction techniques for avionics applications
- Reduction rules-based search algorithm for opportunistic replacement strategy of multiple life-limited parts
- Satellite lithium-ion battery remaining useful life estimation with an iterative updated RVM fused with the KF algorithm
- A Bayesian approach for integrating multilevel priors and data for aerospace system reliability assessment