交通信号灯优化控制*
2018-02-01闫东宇邢双云操峻岩廉甘霖
闫东宇,邢双云,操峻岩,廉甘霖
(沈阳建筑大学,辽宁 沈阳 110168)
随着我国信息技术的发展,交通信息的获取也越来越多样,比如通过分析城市道路交通流量变化的特点,提出一种基于数据融合的监测方法;基于不同相位的动态最小时间需求,并以相位通行需求时间为研究对象,以动态相位时间差为状态转换控制目标,建立了单路口交通信号灯的动态智能控制方法。然而,这些方法均未涉及到自动采集动态影像、处理与分析路口交通流量信息的核心。
就以往的信息传感技术而言,目前,大多数城市交通信号灯控制方法基本上还是采用感应线圈等设备来获取交通信息。由于这种交通量检测设备需要埋设在道路下面,使得安装与维护都很不方便,成本高、抗干扰性差、感应范围极为有限,难以普遍推广,加之其能力十分有限,仅仅能检测出车道上现有车辆的数量。所以,本文针对交通信息的获取、分析、处理以及反馈进行了改进,不同于以往单一的模糊控制,将其靠人工分析的部分改为智能分析,加之“电子警察”应用的日益普及,在城市的许多交叉路口早已装配了采集交通流量的摄像装置,虽然设下“电子警察”的设计初衷是用于人工监控,但我们不妨将其与交通信号灯的控制系统相连接,并将CCD摄像传感技术应用其中,让信号灯的转换完全依靠科学的人工智能。
本项目的研究结果综合考虑了各个车道的排队长度以及车辆通过路口所需的时间,从而决定绿灯时间的分配,更接近人的决策,又不失科学严谨性,能有效地对平面交叉口进行控制。
1 预备知识
模糊控制,是采用由模糊数学语言描述的控制规则来操纵系统工作的一种非线性控制方式,不需要建立精准的数学模型,它靠结合人的思维和经验来实现交通的控制。模糊控制的特点是既有系统化的理论,又有大量的实际应用背景。在传统的控制领域中,控制系统动态模式的精确与否是影响控制优劣的关键,系统动态的信息越详细,则越能达到精确控制的目的。模糊控制对于复杂和难以精确描述的系统有着很好的处理效果。
模糊综合评价法是一种基于模糊数学的综合评标方法。该综合评价法根据模糊数学的隶属度理论把定性评价转化为定量评价,即用模糊数学对受到多种因素制约的事物或对象进行总体评价。它具有结果清晰、系统性强的特点,能较好地解决模糊、难以量化的问题,适合各种非确定性问题的解决。其特点是评价结果不是绝对地肯定或否定,而是以一个模糊集合来表示。
CCD是电荷耦合器件的简称,它使用一种高感光度的半导体材料制成,能把光线转变成电信号,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速储存器或内置硬盘卡保存,可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段根据需要和想像来修改图像。CCD的工作原理是被摄物体反射光线到CCD器件上,CCD根据光的强弱积聚相应的电荷,从而产生与光电荷量成正比的弱电压信号,经过滤波、放大处理等操作,通过驱动电路输出一个能表示敏感物体光强弱的电信号或标准的视频信号。
2 单个交叉路口优化控制
对城市中单个交叉路口的信号灯进行控制,实质就是寻找最佳信号周期和两交叉方向的绿信比,通过对数据的检测和分析我们得出结论:在车流量极小的情况下,信号周期应尽量短,但一般不小于50 s,以免车辆来不及通过路口;在交通车流量很大的情况下,信号周期要尽可能的长,但一般不超过180 s,避免行人或司机等待时间过长。
2.1 计算CCD摄像头的位置
为了解决以往的只能靠埋在地下的磁线圈确定道路车辆多少的问题,以及改进这种只靠车辆数来决定变换交通灯的情况。我们决定使用CCD摄像传感技术来替代地下埋线圈的情况,确定CCD摄像头位置的过程为:将世界坐标系中的Z轴与直行/左转行车为分界线重合且方向为车辆行驶的正方向,设为0,以停车线与车辆行驶方向分界线的交点设置成原点,轴与停车线重合且以行车的左侧为正方向。每个CCD均根据计算机图像坐标系像素点坐标(U,V)和世界坐标系空间三维坐标(X,Y,X)之间的关系标定其内、外参数值。建立如图1的坐标系,并在信号灯处放置CCD电子传感摄像头。
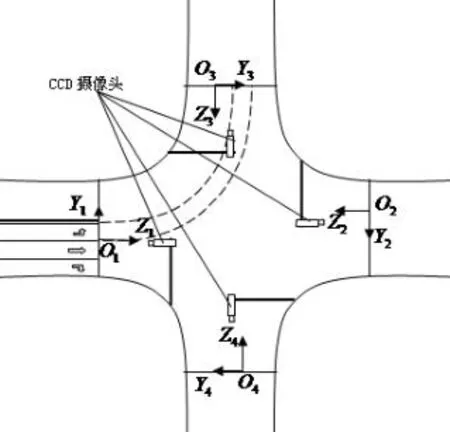
图1 CCD摄像头的位置
2.2 连接所有的CCD摄像头并设计功能
将此路段的所有CCD传感摄像头系统进行连接,将每个路口的CCD传感摄像头的传感功能相连接,检测出各个车道的实时车流量,车的平均速度以及车辆所在车道,反馈到信号处理器中,计算出此刻等红灯车辆通过道口所需时间。根据确定的各个相位最短绿灯时间Gmin和最长绿灯时间Gmax,从而确定最小信号周期Tmin和最大信号周期Tmax,给获得通行权的当前相位i以最小的绿灯时间Gi,min.在此时间内测定该交叉口的车辆信息为:当前绿灯相位车辆的排队长度(实际排队长度与潜在排队长度之和)Li和当前红灯相位上各车道中的最大车辆排队长度Lmax,计算两者的比值q作为输入变量。
模糊化模块的作用是将CCD摄像头传感的精确数值输入变量,通过定义在其论域上的隶属度函数计算出其属于各模糊集合的隶属度,从而将其转化成为一个模糊变量,最终决定绿灯或者红灯的开启。对于输入的变量,假设其论域上定义了“短”“长”两个模糊集合,对于输出变量,在其论域上定义了“红灯亮”“绿灯亮”。
2.3 模糊评价函数的定义
如果Li为0,或Li<v(v>0),v为某一给定值,根据资料将其设定为10,且qi>e(e>0),e为某一给定值,根据资料将其设定为5,或累计绿灯时间已达最大绿灯时间,将下一次通行权分配给车辆排队长度最大的车道所在的相位。如果不满足所设定的条件,由两个输入变量得到当前相位绿灯延时△Gi,则绿灯时间延长△Gi.
这种经过△Gi时间后重新确定绿灯时延的方法可以使绿灯时长分配根据路口的实际交通流量,有一定的自适应能力,保证了通行机会的均等性和通行分配时间的合理性,缩短了延误时间,其基本控制结构如图2所示。

图2 基本控制结构图
我们将模理论应用到了青年大街上进行实地测量,将上述控制算法加载于现有的“电子警察”系统中。CCD摄像头采用MV-VS142FM/FC高分辨率工业数字CCD摄像机,采用连续采集图像的方式。该系列型号摄像机以IEEE1394作为输出通信协议,直接输出数字图像信号且信号稳定,CPU资源占用少,一台嵌入式系统同时连接多台摄像机,适合交通路口的车流图像信息采集。同时,模糊控制也完全适应于“电子警察”,判断出的结果也基本准确。
本文中的算法与现有技术相比具有以下优势:①能够对交叉路口的车流状况及其车辆排队长度进行自动检测,包括右转、直行、左转三种行车方向的车辆排队长度;②结合了模糊控制之后,更加清晰、快速地对路况作出反应,为最终实现城市智能交通提供科学的信息基础。
3 结论
通过将模糊控制技术与CCD摄像传感技术相结合,解决了现有交通信息获取单一的靠在地下埋感应线圈的方法缺陷。通过CCD摄像传感技术可以实时地接收路况信息,包括车流长度、车流速度,然后通过信号处理器计算出此刻车流通过路口所需的时间,将数据实时传输到模糊控制器中,再由模糊控制器决定哪个路口应该通行,最终实现交通信号灯的优化控制。
[1]陈江波.城市交通信号灯的模糊控制器设计[J].晋城职业技术学院学报,2008(01):71-73,91.
[2]刑玉梅,王康平,刘玉秋,等.不确定信息下交通信号灯控制策略的模拟与分析[J].吉林大学学报(理学版),2007,45(05):779-784.
[3]王艳.城市交通信号灯智能控制系统研究[D].哈尔滨:哈尔滨工程大学,2010.
[4]叶尔江·哈力木,曼苏乐,张秀彬.交通信号灯智能控制算法研究[J].微型电脑应用,2012,28(06):42-44.
[5]吴凌霄.基于车辆计数的交通信号灯的控制研究[D].青岛:青岛理工大学,2011.
