基于融合算法的机场场面监视方案研究*
2018-01-27刘建良杨一璜
徐 扬,刘建良,杨一璜
(中南大学 信息科学与工程学院,湖南 长沙 410083)
0 引 言
随着经济的发展,当前民航运输量有着显著的增加。机场飞机起降密度的增加造成了机场空中和地面交通拥挤,存在飞机碰撞的潜在威胁,解决该问题可以从两个方面着手:1)增加跑道数量,即扩大机场的规模;2)采用先进的机场场面监视技术,使机场以最大的容量安全有序快速运行。显然,后者可以达到事半功倍的效果。利用各种机场监视设备,精确地监视机场场面活动区的所有移动目标,及时报告飞机滑行中的跑道冲突,并实现对滑行路线重新规划,以保证飞机安全。
目前,常用的监测技术有多点定位多点监视技术(multi-lateration,MLAT)和广播式自动相关监视(automatic dependent surveillance-broadcast,ADS-B)[1]。本文采用多种监视方法并行的策略[2],构建硬件和软件的冗余,以提高监视系统的安全性和可靠性。
1 系统模型建立
1.1 移动目标动态模型
将机场场面视为一个2维平面坐标系,移动目标视为质点,用2维坐标(ξ,η)描述其位置。定义目标的连续动态:x=[ξη]T∈R4,其中ξ,,η,分别表示X轴坐标、X轴向速度、Y轴坐标、Y轴向速度。假设目标仅有3个状态:匀速直行(constant velocity,CV),左转(left turn,LT),右转(right turn,RT)。分别用1,2,3表示CV,LT,RT这3种状态。本文采用随机线性混合系统(SLHS)描述质点的连续状态,如下
x(k+1)=Aq(k+1)x(k)+Bq(k+1)u(k)+Fq(k+1)w(k)
(1)
式中q(k+1)为k+1时刻质点的状态,q(k+1)∈Q={1,2,3};u(k)为输入系统的控制矩阵;w(k)∈R4为一个高斯白噪声过程;Aq,Bq和Fq为质点处于q状态时的系统矩阵。文中质点自由移动,因此,u(k)=0。
1.2 传感器观测模型
假设系统中有M只传感器,定义u为系统中传感器集合,u:={1,…,M}。本文M=2,传感器1为MLAT,传感器2为ADS-B。如下给出第m个传感器的观测模型
Zm(k)=Cmx(k)+vm(k)
(2)
式中 上标m∈u,为传感器序号;Zm(k)为k时刻的观测值;Cm为观测矩阵,为常矩阵;vm(k)为观测噪声,采用高斯白噪声模拟。
2 融合方案选择
本文中提出了2种数据融合方案,一种基于传感器切换算法[3],另一种基于估计值融合[4]。
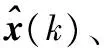
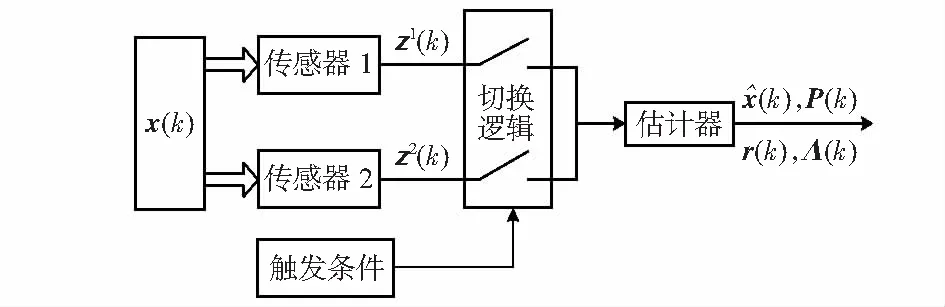
图1 基于传感器切换的方案结构
基于估计值融合的方案如图2所示,其结构特点是采用两个估计器分别对传感器1和传感器2的数据进行处理,之后再将两个估计的输出值利用融合算法进行计算,得到最终结果[6]。在该方案中,两估计器保持对传感器数据实时采样,后级的数据融合算法对数据进行实时处理。与之前的方案相比,该方案的精度明显提高,且实时性明显提升,但数据量较大,需要占用较多通信资源和计算资源,因此,该方案适合用于精度要求较高的场合。在机场场面移动目标监视的应用中,出于安全考虑,对监视系统的精度以及实时性要求较高,所以本文选用基于估计值融合的方案。
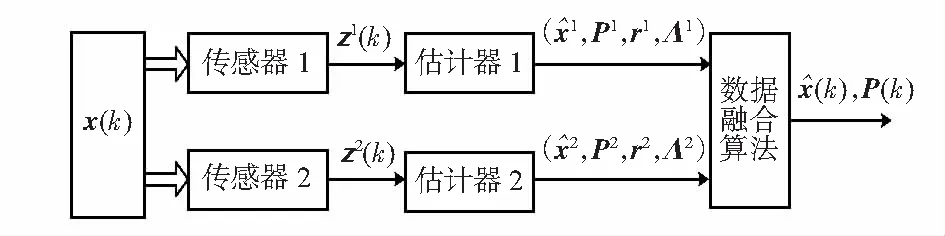
图2 基于估计值融合的方案结构
3 传感器融合算法
3.1 融合处理的原则
融合算法是数据融合处理的核心,其思想是根据估计的输出计算传感器测量值可靠性,对2只传感器的数据进行相应的处理[7,8]。具体原则如下:
1)ADS-B和MLAT均正常运行时,认为2只传感器的状态估计结果相互独立,选取其中之一作为最终结果。
2)ADS-B有故障而MLAT正常运行时,将ADS-B输出的结果丢弃,采用MLAT输出的估计结果。
3)MLAT有故障而ADS-B正常运行时,将MLAT输出的结果丢弃,采用ADS-B输出的估计结果。
4)ADS-B和MLAT均有故障时,根据两者输出值误差大小确定其权重。将结果按照权重结合,计算最终结果。
3.2 误差量化处理
文中传感器均为非理想,其测量值存在一定的误差。为更好地判断传感器误差大小,需要将误差进行量化。针对传感器m,根据估计器的输出,定义其误差量化函数
ρm(k):=(rm(k))T(Λm(k))-1rm(k)
(3)
式中rm(k)为传感器估计值残差;Λm(k)为残差方差。
3.3 权重计算与融合计算

1)若{ρ1(k)≤τ1}∩{ρ2(k)≤τ2},则δ1=1,δ2=δ3=δ4=0;
2)若{ρ1(k)≤τ1}∩{ρ2(k)>τ2},则δ2=1,δ1=δ3=δ4=0;
3)若{ρ1(k)>τ1}∩{ρ2(k)≤τ2},则δ3=1,δ1=δ2=δ4=0;
4)若{ρ1(k)>τ1}∩{ρ2(k)>τ2},则
(4)
PCOM(k):=[(P1(k))-1+(P2(k))-1]-1,
(5)


(6)
4 仿真实验与结果分析
采用MATLAB程序进行仿真,运用所提出的融合算法,通过跟踪平面内自由运动质点的轨迹[9],验证方案以及算法的性能。
4.1 仿真参数设定
首先确定目标动态模型的参数。取采样时间Ts=1 s。CV,LT,RT 3种状态下,质点的速率保持恒定v=10 m/s,对LT状态取ω=-10°/s,对RT状态取ω=10°/s。所有的噪声均取均值为0,方差为1的高斯白噪声。质点的运动状态在CV,LT,RT中按照齐次马尔科夫链进行跳转,马氏链转移概率如下
(7)
确定2只传感器的测量矩阵,如下
(8)
4.2 仿真结果与分析
目标从原点出发,自由运动80 s,共采样80个点,目标轨迹及其不同方案下的跟踪结果如图3所示。
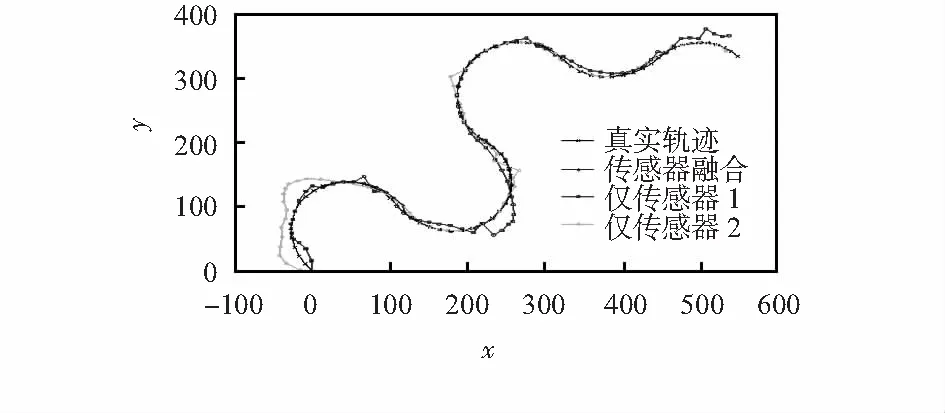
图3 质点轨迹与跟踪结果
图3中的4条曲线中,一条目标的真实轨迹,其余3条曲线分别3种情况下的跟踪结果。可以明显地看出:经过传感器数据融合处理后位置估计与目标原运动轨迹基本一致,而其他2种情况下则会出现较大误差,表明融合算法能够显著提高跟踪的精度。
为定量研究目标位置估计误差,本文引入了误差均方根(root mean square,RMS)的计算,具体形式如下
(9)
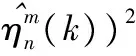
将上述仿真实验运行200次,分别计算3种情况下每个采样点估计误差的RMS,结果如图4所示。可以看出:融合处理后的误差RMS始终维持在较低的水平,实验数据表明本文提出的融合算法能够明显降低估计误差。
图4 位置估计误差均方根
5 结 论
针对单一监视技术高误差率和低可靠性,提出了一种基于融合算法的机场场面监视方案,采用ADS-B和MLAT 2种监视技术并行的方式,并采用融合算法处理数据,从而实现精度的提高。仿真实验表明,本文提出的方案以及算法,可以有效地提高目标动态监视的精度。
[1] 张 睿.机场场面监视技术的比较及发展[J].中国西部科技,2010,9(1):34-36.
[2] 徐 工,曲国庆.基于多传感器融合的移动测绘系统应用评述[J].传感器与微系统,2014,33(8):1-4.
[3] Wang Jinkuan,Yan Dongmei.Sensor scheduling algorithm target tracking-oriented[J].Wireless Sensor Networks,2011,3(8):295-299.
[4] 赵辰冰,齐占辉.基于信息融合技术的多传感器大气波导探测研究[J].传感器与微系统,2014,33(4):41-44.
[5] Lin X G,Xu S S.VMulti-sensor hybrid fusion algorithm based on adaptive square-root cubature Kalman filter[J].Journal of Marine Science and Application,2013,12(1):106-111.
[6] Ruan Dianxu,Zhang Xiaoguang,Li Lijun.Safety data fusion algorithm in wireless sensor networks[J].Journal of Networks,2013,8(5):1121-1129.
[7] 刘庆贵,周冬桥.基于多传感器融合的卷烟机自诊断系统设计[J].传感器与微系统,2012,31(3):136-139.
[8] 陈庆文,孙凯明,王 琨.泵体参数多传感器融合技术的研究[J].自动化技术与应用,2015,34(12):120-123.
[9] 卢 宇,刘昌忠.基于机场地理信息的多传感器融合跟踪[J].光电工程,2012,39(4):27-31.
