基于模拟实验的驾驶人警觉影响因素研究
2018-01-27袁玲薇
熊 坚,袁玲薇,熊 登
(1.昆明理工大学 交通工程学院,云南 昆明 650500;2.昆明云内动力股份有限公司,云南 昆明 650224)
0 引 言
道路交通系统是由人-车-路所构成的动态系统,其中驾驶人是整个系统中不确定的因素之一,也是影响交通安全的首要因素[1]。交通事故分析显示,在突发情况下,由驾驶人警觉不足导致的交通事故占有一定比例,而导致其警觉下降的原因目前尚不清楚。据美国相关部门数据显示,驾驶人每行驶800 km就会面临1次紧急危险情况[2],这就要求驾驶人时刻保持高度警觉性。因此对驾驶人警觉特性进行研究,探索对驾驶人警觉特性产生影响的因素,对预防和减少事故的发生起着重要作用。
20世纪50年代以来,陆续有学者开始对警觉特性进行研究。魏松涛等[3]对前人的警觉理论进行了总结,他认为由于刺激信号的反复出现,操作者对信号刺激的反应会减少或没有反应,呈现一种抑制状态。20世纪90年代之后,驾驶人的警觉特性研究才广泛受到重视。C. AURELIE等[4]采用驾驶模拟器,用冲出道路和速度较大变化的次数表示驾驶错误,用脑电图数据表示警觉水平,研究了不同年龄段的驾驶人在警觉水平和驾驶错误上的差异;A. S. EIKE[5]和M. ROMAN等[6]都对长时间单调驾驶对驾驶员警觉和注意的影响进行了研究,A. S. EIKE利用实车测试,用心电图和脑电图的数据分析驾驶员的警觉状态,M. ROMAN用驾驶模拟器测试,用大脑的电位活动分析驾驶员的注意水平,结果都表明在长时间单调驾驶后驾驶人的警觉持续下降;张德乾[7]和马锦飞等[8]从音乐的角度出发,研究音乐对驾驶警觉的影响,得出合适的音乐可以使驾驶员处于最佳唤醒水平保持较高的警觉性。这些实验和方法为驾驶人警觉特性以及警觉影响因素的研究提供了新的研究思路,并在驾驶实践中起到了一定作用。
有必要指出的是,国内外对驾驶人警觉特性的研究存在两个问题:较少以驾驶人为对象研究警觉特性;没有考虑影响驾驶人警觉的道路环境、交通管控及风险信息因素等。笔者以驾驶人为对象研究警觉特性,建立城市道路和高速公路两种场景,选择有无交通信号灯和风险信息量,分别作为这两种场景中的代表影响因素;通过驾驶模拟仿真实验,测试驾驶人在城市道路十字交叉口路段有无交通信号灯和高速公路不同风险信息量4种场景下对风险情况时的驾驶人制动反应时间和注视行为参数;分析驾驶人在不同场景中确定因素下警觉水平的差异性,最终得到对驾驶员警觉影响显著的因素。
1 驾驶人警觉相关因素及参数分析
国内外学者对警觉的定义有不同的解释和表述,笔者归纳其中的共同之处,并结合驾驶人自身特性及道路交通环境特点,将文中驾驶人警觉概括为:驾驶人在车辆行驶过程中对道路上出现的一些风险信息保持较高的警惕性并且能够对其作出适当的应激反应。
影响驾驶人警觉水平的因素主要从风险特征,驾驶人特征,道路交通环境3个方面进行分析。笔者综合考虑城市道路和高速公路两种场景,选取道路交通环境中交通信号灯有无和风险特征中风险信息量分别作为两种场景的代表影响因素。
反应时间是反应驾驶人警觉水平的一个重要参数。道路交通环境中一些具有危险性的突发状况,会影响驾驶人的心理和生理特性,必然会影响驾驶人的反应时间,进而影响到驾驶人的警觉水平。因此,将驾驶人的制动反应时间作为警觉水平的一个评价参数。同时,驾驶人在行驶过程中其眼动是视觉认知过程中十分重要的感官信息源,通过分析眼动数据可以探究眼动与人的心理关系[9],而驾驶适宜性理论认为,驾驶人反应迟缓、警觉水平低受心理和生理影响较大[10]。由此,笔者也将利用驾驶人的注视行为数据辅助分析不同影响因素下的驾驶人警觉水平,作为驾驶人警觉水平的另一个评价参数。
2 驾驶人警觉影响因素仿真实验
2.1 仿真测试实验设计
本次实验采取重复测量实验设计。实验中风险信息数量和交通信号灯有无这两个因素为自变量,因变量是驾驶人制动反应时间和注视行为参数。利用场景设计软件设计相应的三维模拟交通场景,部分受试者佩戴眼动仪在驾驶模拟器上驾驶,遇到风险情况时,采取紧急制动。本次实验场景中风险信息包括高速公路上摩托车突然向左变道和城市道路上车辆通过十字交叉口这两种情况。由于车速对驾驶人的警觉水平有影响,为消除这一影响,在实验时对受试者的运行速度进行控制:城市道路场景中车速控制在60 km/h左右;高速公路场景中车速控制在90 km/h左右。
通过进行城市道路和高速公路场景下驾驶人的警觉特性仿真测试实验,得到不同风险场景下驾驶人的制动反应时间、注视行为数据,分析驾驶人在两种场景因素下警觉水平的差异性,找到对驾驶人警觉影响显著的因素。
2.2 仿真测试实验样本
以往研究表明驾驶任务对不同驾驶经验的驾驶人影响可能不同,新手驾驶人更容易在紧急状况下表现出高应激状态[11-12]。本实验共选取30名驾驶人,符合心理学小样本数量:熟练和新手驾驶人各15名。熟练驾驶人为出租车司机和驾校教练,驾龄大于5年,行车里程超过10万km;新手为在校大学生,驾龄3年内,行车里程小于10 000 km。同时为保证选取上多样化,女性驾驶人有12人。在仿真测试实验中,为避免由于仿真驾驶无经验导致的结果差异,要求被试人在接触实验之前要熟悉驾驶模拟系统[13]。
2.3 仿真测试实验设备
本次实验选取昆明理工大学道路交通仿真实验室开发的KMRTS驾驶模拟系统作为主要测试设备,并辅以iview HED4眼动仪,利用VSDesign 场景设计软件设计实验场景进行仿真测试实验。其中驾驶模拟舱由一辆真实的车改装,使驾驶人在驾驶时有高度的真实感;图像采用虚拟现实技术由计算生成并通过3台高清投影仪投影在具有150°视角的弧形屏幕上。如图1。

图1 KMRTS驾驶模拟系统平台Fig. 1 KMRTS driving simulation system platform
2.4 仿真场景设计
2.4.1 静态场景设计
根据驾驶人警觉影响因素不同,设计2组对比实验。第1组,设计两段3.5 km的高速公路,分别是单风险和双风险信息路段,限速100 km/h;第2组,设计两段3.3 km的城市道路,分别是有和无交通信号灯的十字交叉口路段,限速60 m/h,一共4个实验场景。其中,高速公路场景根据某实际道路数据设计,城市道路场景按照实验需求自行设计。车道为双向四车道,每个车道宽3.5 m。实验情境中气候条件良好。每个道路场景实验需5 min。
2.4.2 动态场景设计
研究驾驶人遇到风险情况的制动反应时间,需设置相应的风险信息。本次实验场景中,高速公路上设置前方右侧行驶的摩托车突然变道为风险信息,城市道路上设置小车突然通过十字路口为风险信息。
1) 高速公路场景
高速公路场景根据实际交通风险场景录像设计。该实验场景包括双风险和单风险信息路段,研究风险信息数量对驾驶人警觉特性的影响。
双风险信息路段设置摩托车和大货车2个风险信息。运行程序如下:设到达每个触发区的时刻为Ti,当主车以90 km/h的速度行驶至距匝道口300 m时,到达第1个触发区,记为T1,此时触发摩托车以60 km/h行驶,两车相距120 m;主车继续行驶到距匝道口150 m处,到达第2个触发区的时刻记为T2,触发右侧匝道内的大货车以60 km/h行驶,此时大货车距离匝道口100 m;当三车同时行驶到匝道口时记为T3,此时摩托车突然向左变道,主车与摩托车距离较近。驾驶人经过T1~T3时间段完成运行。

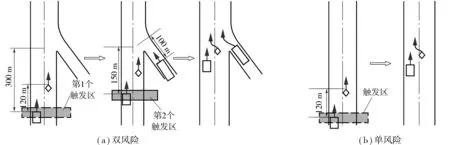
图2 高速公路虚拟场景示意Fig. 2 A sketch map of highway virtual scenario
2) 城市道路场景
城市道路场景旨在测试不同交通管控条件对驾驶人警觉特性的影响,选择交通信号灯作为交通管控条件的控制变量。该实验场景包括十字交叉口路段有无交通信号灯两种情况,研究有无交通信号灯对驾驶人警觉特性的影响。
在有交通信号灯的十字交叉口路段,设置两个触发区。设到达每个触发区的时刻为Tj,当主车以60 km/h行驶至距人行横道200 m时,到达第1个触发区,记为T1,此时触发前方交通信号灯由红灯变为绿灯,另一条道则相反;主车继续行驶至距人行横道10 m处,到达第2个触发区的时刻记为T2,触发另一条道上的车辆以60 km/h从人行横道驶出,闯红灯。驾驶人经过T1~T2时间段完成运行。

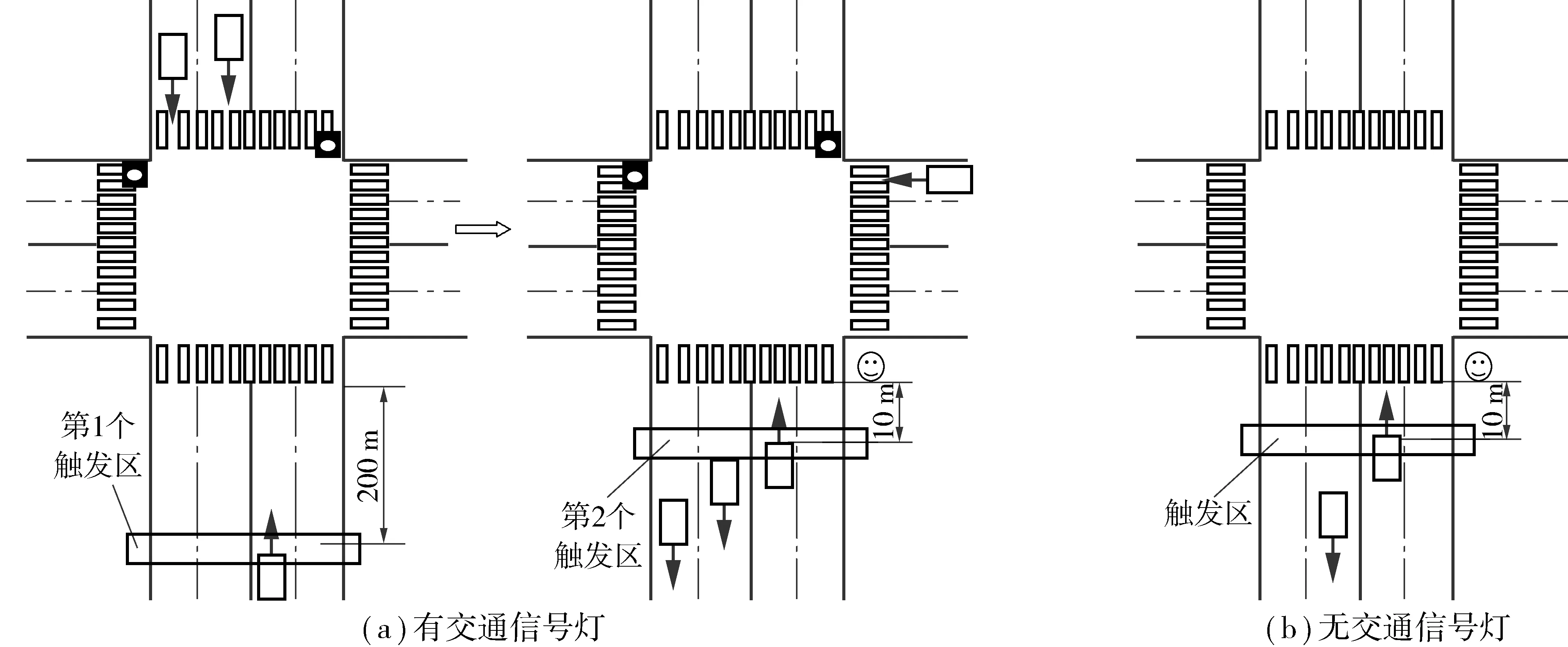
图3 城市道路虚拟场景示意Fig. 3 A sketch map of urban road virtual scenario
2.5 实验程序
本实验共分为4个阶段,分别为实验前准备、正式实验、数据采集和数据处理。实验开始前,告知受试者按照日常习惯自由驾驶,使受试者熟悉驾驶模拟器的操作流程,观察到受试者适应模拟器后,停止练习;实验时,在高速公路场景下,要求驾驶人在内侧车道行驶,不能变道,尤其在紧急情况下;城市道路场景下,驾驶人按驾驶习惯正常驾驶;当遇到风险情况时,采取紧急制动措施确保车辆安全,同时工作人员开始采集模拟器数据。
2.6 数据采集
本次实验采集到危险场景中风险信息出现的时间点和驾驶人发现风险信息时制动踏板位移变化的时间点数据,二者之差即为驾驶员制动反应时间。
实验有25名驾驶人佩戴眼动仪进行仿真模拟实验,逐帧统计驾驶人在风险发生瞬间路段的注视行为数据,通过这些注视行为参数辅助分析各场景下的驾驶人警觉特性。
3 实验数据分析
驾驶员警觉影响因素仿真实验要求在城市道路和高速公路场景中车速控制分别为60 km/h和90 km/h。为了排除速度对实验结果的干扰,分别采集每位受试者在城市道路场景中风险出现前200 m和高速公路场景中风险出现前300 m路段的速度进行统计,如图4,受试者的运行速度基本符合模拟实验要求。
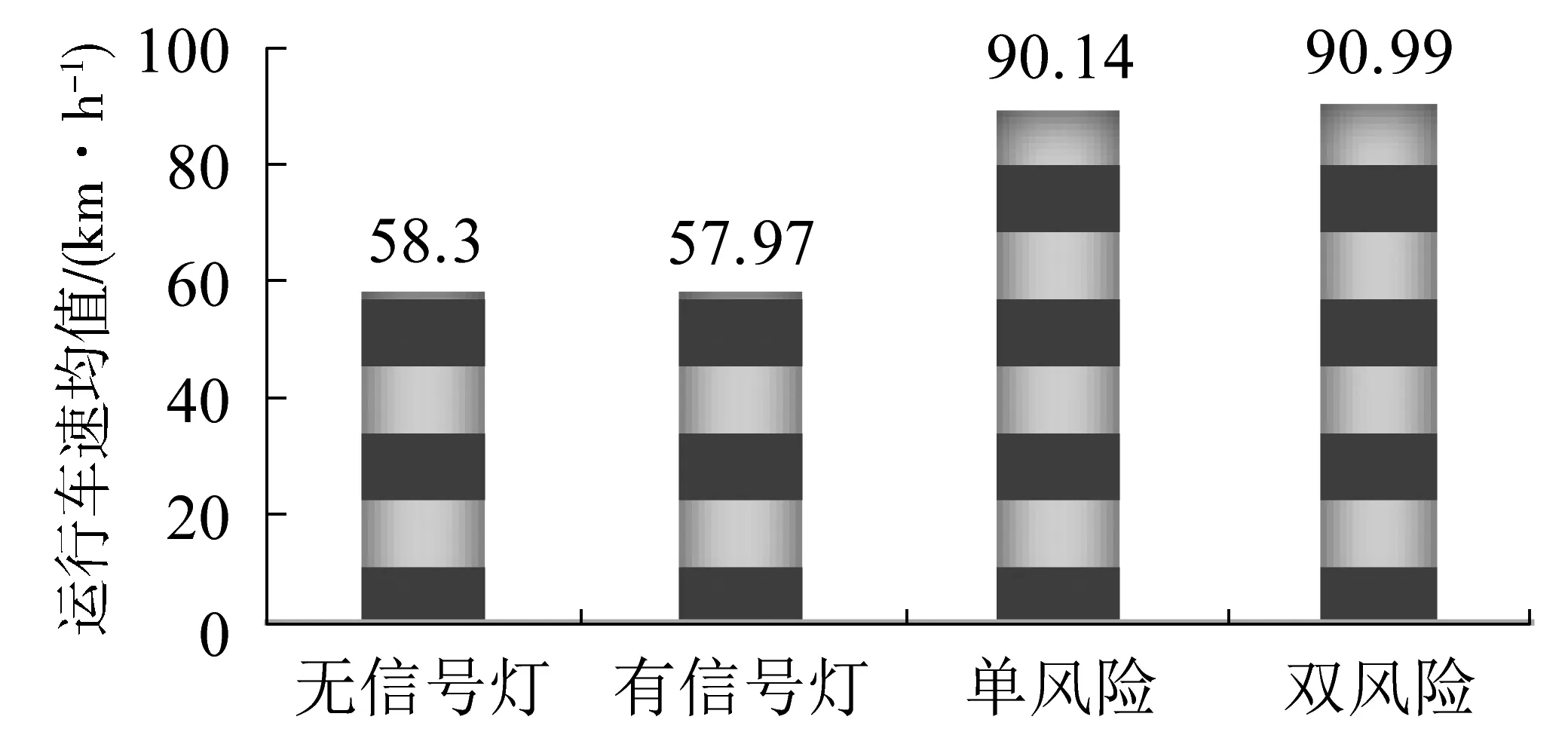
图4 不同场景下运行速度均值Fig. 4 Average running speed in different scenes
初步分析不同场景下受试者的制动反应时间数据,删除因受试者操作失误以及测量误差导致的异常数据,对得到的驾驶人制动反应时间数据进行统计,结果如表1,从表中看出极小值为0.42 s,极大值为2.36 s。目前对制动反应时间的研究显示,驾驶员制动反应时间基本在0.3~2.5 s范围内[14-15],本次实验得出的数据都在此范围内,实验数据有效。
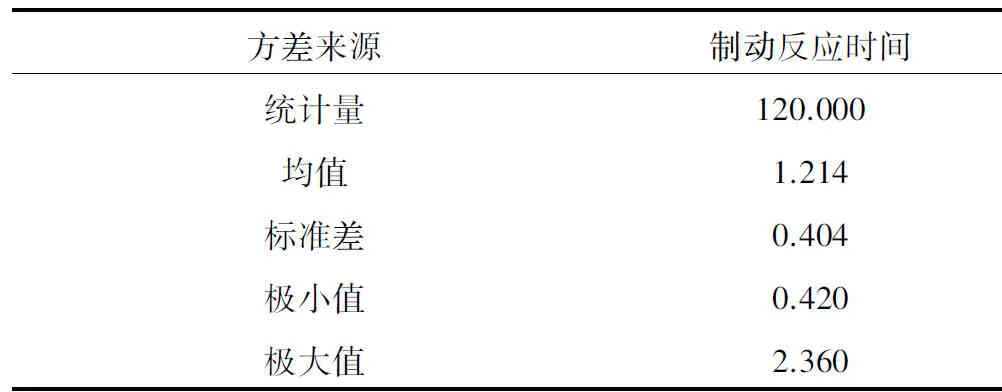
表1 驾驶员制动反应时间总体描述统计Table 1 Overall description and statistics of drivers’ braking reaction time s
对所确定的驾驶员制动反应时间数据进行正态性检验,服从正态分布,对于数据分布形态的推断非常重要,能为下一步的统计分析提供便利。由Kolmogorov检验结果可知见表2,各场景下反应时间显著性都大于0.05,说明与正态分布的假设无显著差异,即此4种场景下的驾驶员制动反应时间均符合正态分布。
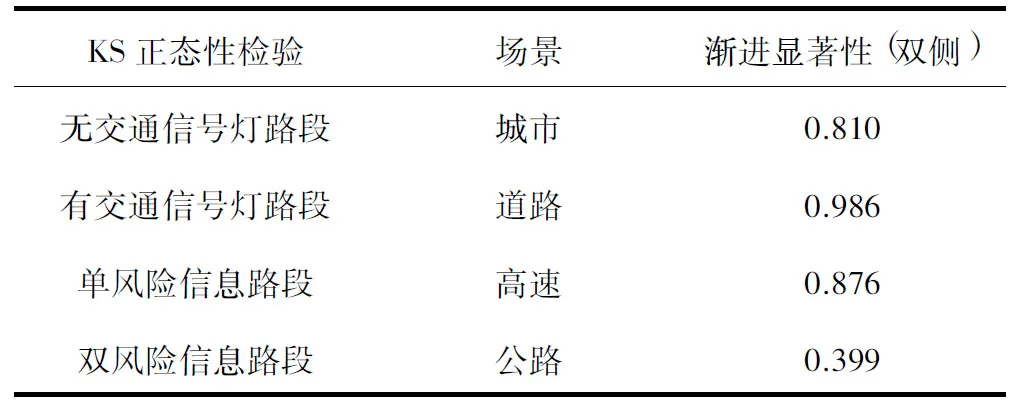
表2 驾驶员制动反应时间单样本正态分布检验Table 2 Normal distribution test of drivers’ braking reaction time
4 驾驶人警觉影响因素分析
4.1 交通信号灯对驾驶人警觉影响分析
在城市道路场景中,对十字交叉口有无交通信号灯路段下的驾驶人制动反应时间进行差异性分析,探究对驾驶人警觉特性影响显著的因素。城市道路场景中驾驶员制动反应时间均值和方差见表3。

表3 驾驶员制动反应时间均值与方差Table 3 Mean and variance difference table of drivers’ braking reaction time s
图5(a)是城市道路场景中驾驶员制动反应时间在99%置信区间的简单误差条形图。从表3和图5(a)看出:在十字交叉口路段,无交通信号灯下驾驶员制动反应时间均值为1.008 s,反应时间短且离散度小;有交通信号灯下驾驶员制动反应时间均值为1.188 s,与无交通信号灯路段相比,反应时间相对较长。由此在有交通信号灯和无交通信号灯路段下,驾驶员制动反应时间存在差别,反映出驾驶员警觉水平有差异。
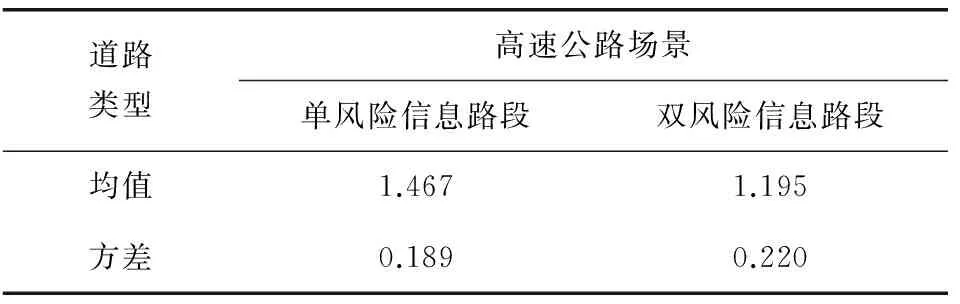
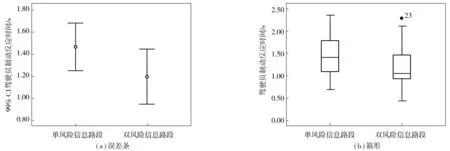
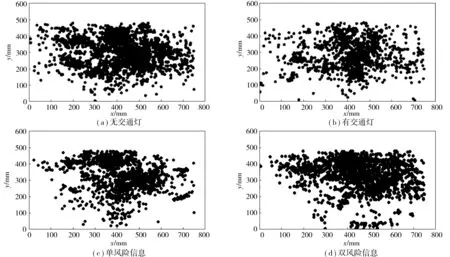
图5(b)是城市道路场景下驾驶员制动反应时间箱形图。设Q1=中位数-第1/4分位数,Q2=第3/4分位数-中位数。在十字交叉口路段,无交通信号灯下,Q1为0.139,Q2为0.121,Q1>Q2;而在有交通信号下,经计算可得Q1 图5 城市道路场景中驾驶员制动反应时间分析Fig. 5 Analysis of drivers’ braking reaction time in urban road scenario 为进一步比较十字交叉口路段有无交通信号灯下驾驶员警觉水平的差异,用单因素方差分析法对两种场景下的驾驶员制动反应时间进行t检验。 设在十字交叉口路段,无交通信号灯下驾驶员制动反应时间为x1,有交通信号灯下为x2,即di=x2i-x1i,其中x1i和x2i分别表示无交通信号灯和有交通信号灯下十字交叉口路段驾驶员制动反应时间的第i个数据。取显著性水平为0.01。将相应数据代入式(1)可得 (1) 查t值分布表,当df=N-1=29时,t(0.01)=2.462。 因为t=3.70>t(0.01)=2.462,p<0.01,所以在十字交叉口路段,无交通信号灯和有交通信号灯两种场景下驾驶员的制动反应时间在0.01显著性水平上存在差异。 综上,在城市道路环境中十字交叉口路段,无交通信号灯和有交通信号灯两种场景下驾驶员的警觉水平存在显著性差异,交通信号灯的有无对驾驶员的警觉水平有明显影响。 高速公路场景中,分析单风险和双风险信息路段下驾驶员制动反应时间的差异,来判定风险信息量对驾驶人警觉特性的影响。在此场景下驾驶员制动反应时间均值和方差见表4。图6(a)能更直观的反映高速公路场景中单风险和双风险信息路段驾驶员制动反应时间的离散度情况。 表4 高速公路场景下驾驶员制动反应时间均值与方差Table 4 Mean and variance difference table of drivers’ braking response time in the highway scene s 图6 高速公路场景中驾驶员制动反应时间分析Fig. 6 Analysis of drivers’ braking reaction time in highway scenario 从图6和表4可以看出:在单风险信息路段,驾驶员制动反应时间均值为1.467 s,99%置信区间内主要分布在1.2~1.7 s之间;而双风险信息路段,99%置信区间内主要分布在0.9~1.4 s之间,与单风险信息路段相比,整体反应时间较短。通过驾驶人制动反应时间的差别可以反映出驾驶员警觉水平的差异,双风险信息路段,驾驶员反应时间较短,说明驾驶员的警觉水平相对较高。 另外通过箱形图也可以观察高速公路场景下驾驶人制动反应时间的分布情况,如图6(b)。用类似图5(b)的分析方法,在高速公路场景中,单风险信息路段,Q1为0.339,Q2为0.34,Q2>Q1,制动反应时间在中位数两侧均匀分布;但是,在双风险信息路段,经计算可得Q1 为进一步确定风险信息数量对驾驶员警觉水平是否具有显著性影响,对单风险和双风险信息路段驾驶员制动反应时间进行方差分析。 设单风险信息路段驾驶员制动反应时间为x7,双风险信息路段为x8,即di=x8i-x7i,其中x8i和x7i分别表示单风险信息路段和双风险信息路段驾驶员制动反应时间的第i个数据。将相应数据代入式(2)可得 (2) 查t值分布表,当df=N-1=29时,t(0.01)=2.462。 因为t=3.47>t(0.01)=2.462,p< 0.01,所以在高速公路场景下,单风险和双风险信息路段驾驶员的制动反应时间在0.01显著性水平上存在显著性差异。 综上可知,在高速公路场景中,出现单风险和双风险信息时驾驶员警觉水平不一样,存在显著性差异,风险信息出现的数量对驾驶员警觉水平有影响。 分析所有受试者在城市道路和高速公路4种场景下行车过程中的眼动数据,用以辅助研究各个场景下的驾驶员警觉特性。用单次注视点的横、纵坐标散点图集结表示注视区域,得到所有驾驶员在4个场景下的注视区域图如图7。 图7 不同场景下驾驶员注视点散点Fig. 7 Scatter point graph of drivers’ fixation point under different scenes 根据图7,在无交通信号灯路段,驾驶人注视点主要集中于正前方、左侧和右侧区域,辐射范围较大,且远近交替注视;有交通信号灯路段,驾驶人前方远近交替注视,左右两边偶有辐射。这表明驾驶人在无交通信号灯管控路段,对十字交叉口左、右和中间时刻保持注意,警觉性较强;而有交通信号灯路段,驾驶人对路口两边情况较少注意,警觉性较差。在高速公路场景中,单风险信息路段,驾驶员注视点集中于前方远处,两边辐射范围不大,驾驶过程中主要关注前方路况,对旁边车道警觉性不够;双风险信息路段,驾驶员主要注视正前方远处和右侧远处,对前方和右侧车道的车流情况时刻保持注意,当右侧车道发生风险情况,驾驶员能第一时间做出反应。 1) 设计了针对测试驾驶人警觉特性影响因素的仿真实验,通过对比实验分析不同场景因素对驾驶人警觉特性影响的差异性。针对以往对警觉特性研究较少以驾驶人为主体及几乎不考虑道路环境、交通管控的问题,笔者在这2个方面取得创新。研究成果可作为培训及提高驾驶人警觉水平、分析道路交通事故原因的理论辅助工具。 2) 交通信号灯对驾驶人警觉水平有显著影响。有交通信号灯时,驾驶人制动反应时间较长,警觉性下降;无交通信号灯时,驾驶人制动反应时间相对较短,且注视区域广,警觉性相对较高。说明在有一定交通管控的条件下,驾驶人对冲突的关注度不高,警觉出现松懈;相反,无交通管控时,驾驶人注意力高度集中,警觉水平上升。需要着重指出,笔者只是研究两种情况下的驾驶人警觉性,而不是安全性。从安全性的角度看,交通管控会使安全性显著提高,这是不言而喻的。 3) 风险信息量对驾驶人的警觉水平有显著影响。相对于单风险信息,双风险信息时驾驶人制动反应时间更短,说明驾驶人在双风险信息路段,需要注意的信息较多,警觉性较高。 4) 驾驶人的警觉性与个体特性有很大关系,本次实验没有考虑个体差异问题。未来研究中,可考虑驾驶人的个体特性,对受试者进行分类实验,对驾驶人的警觉性进行更深入的研究。 [1] 肖将.驾驶人风险感知效用研究[D].昆明:昆明理工大学,2015. XIAO Jiang.ReviewoftheDriver’sHazardPerception[D].Kunming:Kunming University of Science and Technology,2015. [2] 刘玮.基于动力定型理论的驾驶员应激训练场景构建与评价[D].西安:长安大学,2012. LIU Wei.ConstructionandEvaluationofDriverStressTrainingScenesBasedonDynamicStereotypyTheory[D].Xi’an:Chang’ an University,2012. [3] 魏松涛,许百华.警戒研究及其发展趋势[J].人类工效学,1998,4(2):60-62. WEI Songtao,XU Baihua.Vigilance research and its development trend[J].ChineseJournalofErgonomics,1998,4(2):60-62. [4] AURELIE C,THIERRY P,ALAIN M.Correlation between driving Errors and vigilance level:influence of the driver’s age[J].PhysiologyandBehavior,2004,80(4):515-524. [5] EIKE A S,MICHAEL S,MICHAEL S.Drivers’ misjudgment of vigilance state during prolonged monotonous daytime driving[J].Accident Analysis and Prevention,2009,41(5):1087-1093. [6] ROMAN M,JAN R.Driver’s attention during monotonous driving[J].InternationalConferenceonBio-MedicalEngineeringandInformatics,2013:486- 490. [7] 张德乾.监控警戒下降及其研究趋势[J].井冈山大学学报(社会科学版),2014,35(2):77-82. ZHANG Deqian.Review of the mechanism of vigilance decrement and future research[J].JournalofJinggangshanUniversity(SocialSciences),2014,35(2):77-82. [8] 马锦飞,常若松,陈晓晨,等.音乐对驾驶警觉的影响及其理论模型[J].心理科学进展,2014,22(5):782-790. MA Jinfei,CHANG Ruosong,CHEN Xiaochen,et al.The effect of music on driving vigilance and its theories[J].AdvancesinPsychologicalScience,2014,22(5):782-790. [9] BOROWSKY A,SHINAR D,ORONGILAD T.Age,skill,land hazard perception in driving[J].AccidentAnalysisandPrevention,2010,42(4):1240-1249. [10] 郭忠印.道路交通安全工程[M].北京:人民交通出版社,2013:88-98. GUO Zhongyin.RoadTrafficSafetyEngineering[M].Beijing:China Communications Press,2013:88-98. [11] MATTHEWS G,DORN L,GLENDON A.Personality correlates of driver stress[J].PersonalityandIndividualDifferences,1991,12 (6):535-549. [12] DORN L,MATTHEWS G.Two further studies of personality correlates of driver stress[J].PersonalityandIndividualDifferences,1992,13 (8):949-951. [13] 陈颖.驾驶人应激训练仿真系统设计与实现[J].重庆交通大学学报(自然科学版),2015,34(5):95-99. Chen Ying.Design and implementation of driver stress training simulation system[J].JournalofChongqingJiaotongUniversity(NaturalScience),2015,34(5):95-99. [14] 陈瑶.公路景观对停车视距的影响研究[D].昆明:昆明理工大学,2015. CHEN Yao.TheStudyingtheInfluenceoftheHighwayLandscapeontheStoppingSightDistance[D].Kunming:Kunming University of Science and Technology,2015. [15] 余志生.汽车理论[M].北京:机械工业出版社,2000:102-116. YU Zhisheng.AutomobileTheory[M].Beijing:China Machine Press,2000:102-116.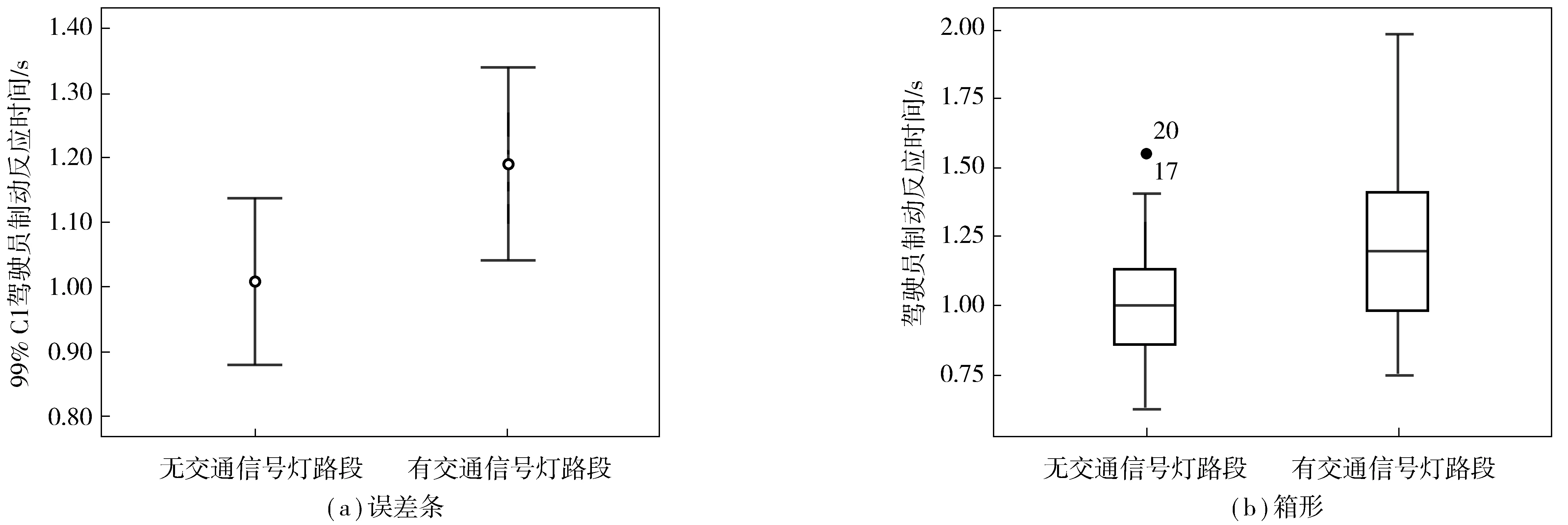

4.2 风险信息数量对驾驶员警觉影响分析
4.3 不同场景下驾驶员注视点分析
5 结 论