基于Unigraphics的并联机床建模与仿真
2018-01-23黄正祥蔡知旺王春普马朝阳
□黄正祥 □蔡知旺 □王春普 □马朝阳
陕西科技大学机电工程学院 西安 710021
1 研究背景
并联机床又称虚拟轴机床,基于空间并联机构Stewart平台构型开发,是并联机器人机构与机床结合的产物,属于空间机构学、机械制造、数控技术、计算机辅助设计和制造技术高度结合的高科技产品。并联机床结构简单而数学运算复杂,整个平台的运动牵涉到相当庞大的数学运算,是一种知识密集型机构。并联机床由于具有高刚度、高承载能力、高速度、高精度、质量轻、机械结构简单、制造成本低、标准化程度高等优点,因此在许多领域都得到了成功应用,受到学术界的广泛关注[1]。
Unigraphics(UG)是集计算机辅助设计、制造、工程产品数据管理等于一体的三维参数化软件。在UG的运动模块中,为了保证设计的准确性,对机械结构进行运动仿真和运动分析时,通过机械结构在仿真运动过程中的运动方式和轨迹可判断其运动结果是否与设计相一致[2]。机械零件在运动过程中的位移、速度、加速度、作用力和力矩等都可以在UG运动模块中进行分析。机械结构在仿真运动过程中还可以生成图片、动画和电影文件[3]。
2 并联机床三维建模
UG的建模模块为三维建模提供了极强的造形功能,通常使用实体建模和特征建模两个功能。实体建模包括基于约束的特征建模和显式几何建模,集成特征环境内的传统实体、曲线和框线建模的功能,使用户能够方便地建立二维和三维线框模型,扫描和旋转实体,进行布尔运算及参数化编辑。特征建模基于外形和位置的尺寸驱动参数化定义特征,包括变形孔、键槽、型腔、凸垫、凸台,以及全集的圆柱、块、锥、球、管道、杆、倒圆、倒角等。
装配模块是UG中集成的一个应用模块[7],能实现对部件模拟装配。在装配中可以生成各个部件的建模及装配图纸零件明细表。
并联机床结构主要包括底座、六角头螺栓、工作台、平口钳、主轴动平台、滚珠丝杠副、立柱、电主轴、顶梁、虎口铰链等,其结构如图1所示。电主轴结构主要包括碟形弹簧、后锁紧螺母、后轴承、外壳、冷却油出口、转子、定子、冷却套、冷却油入口、前喷嘴、前轴承、拉杆、拉钉、芯轴、前锁紧圆螺母、前端盖等,其结构如图2所示。

图1 并联机床结构图
图2 电主轴结构图
3 机床运动仿真
运用UG建模模块建立并联机床三维实体模型后,根据机床的运动特点,对三维实体模型的各个组成部件赋予特定的运动学特性,并使各个组成部件之间建立一定的关联,这样就可以建立起一个整体式的运动仿真模型。通过设定仿真时间,可以对运动仿真模型进行运动学或动力学分析,从而验证结构设计的合理性。
3.1 创建连杆和运动副
在并联机床运动时,根据运动原理,将伺服电机作为动力源,通过万向铰链带动丝杠旋转和摆动,并通过丝杠和套筒的相对运动,由万向铰链带动主轴动平台运动。由于需要根据动平台设定运动轨迹来求解滚珠丝杠的运动结果,因此需要逆向将动平台的运动作为动力源[4]。在设置过程中,点击连杆命令,选择动平台主轴、万向铰链各部件、丝杠和套筒、底座、刀架台,在连杆选项中生成若干连杆,其中底座和刀架台设定为固定连杆。点击运动副命令,将各个连杆连接在一起,从而使相关连杆运动。运动副命令通常情况下具有允许所需运动和限制不需要运动的功能,此处所需运动副为固定副、滑动副和旋转副。此外,主轴动平台沿设定曲线运动,需要设置运动驱动机构为约束J003。设定曲线选取漏斗形螺旋线,如图3所示。
图3 漏斗形螺旋线
3.2 创建驱动和干涉
根据结构,运动驱动机构为约束J003,选择恒定驱动,并设定以10 mm/s进行匀速运动,如图4所示。干涉功能如图5所示,作用是检测机构与选定的几何体是否在运动中存在碰撞,一旦发生碰撞,则停止运动[8]。
3.3 运动仿真
UG运动仿真和分析的核心是ADAMS解算。打开解算方案,解算方案类型设置为常规驱动,分析类型设置为运动学/动力学,时间设置为61 s,步数设置为100,勾选通过按确定进行解算,设定重力指定方向,如图6所示。
UG提供了可以采用动画的形式表现并联机床的运动仿真过程,如图7所示[9]。
图4 创建驱动截图
图5 干涉功能截图
3.4 运动特性分析
完成上述运动仿真后,点击作图命令,选择对象为丝杠1、丝杠2和丝杠3,请求选项选择为位移,分量选项选择为幅值,轴定义中Y轴选择添加一条曲线,得到丝杠的位移时间曲线,如图8所示,并得到动平台三轴位移时间曲线,如图9所示[10]。
将并联机床的丝杠及顶梁设置为干涉,一旦发生碰撞则停止运动。由图8、图9可知,在并联机床运动仿真的61 s内,曲线平滑连贯。由此可知,该并联机床关键运动零部件的结构设计方案合理,且运动无干涉。
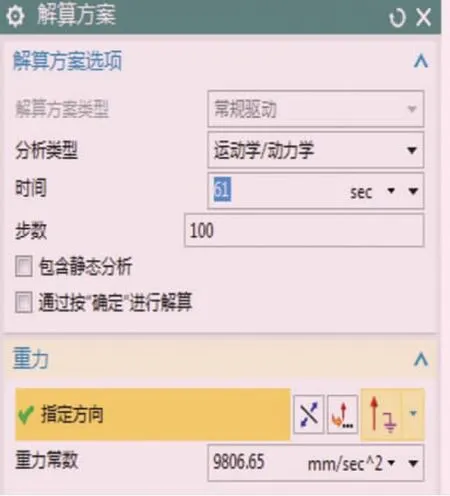
图6 解算方案截图
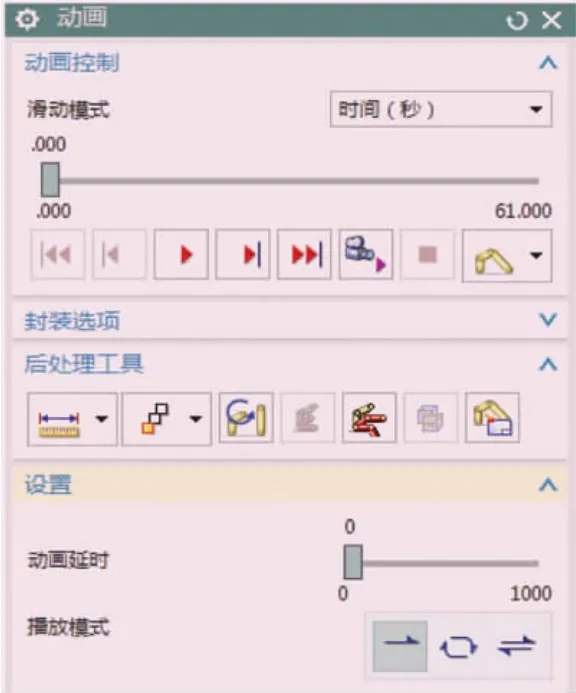
图7 动画功能截图
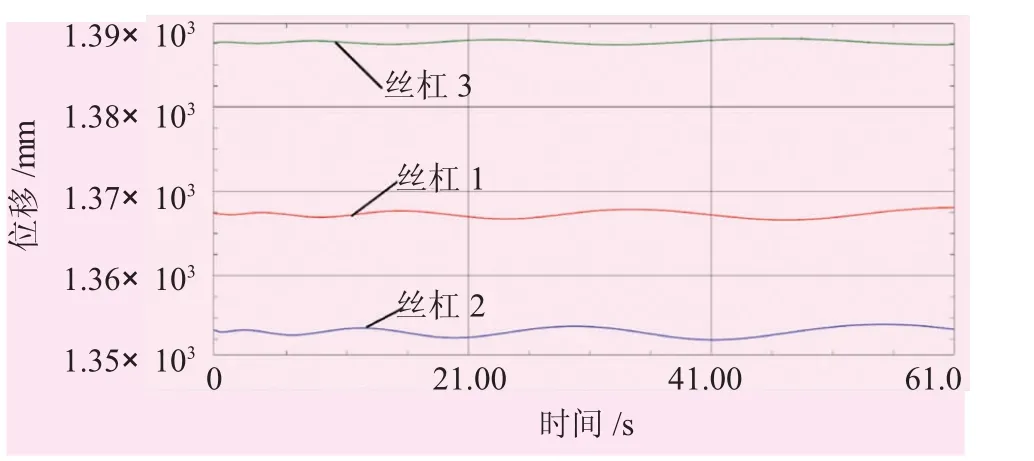
图8 丝杠位移时间曲线

图9 动平台三轴位移时间曲线
4 结束语
利用UG软件对并联机床进行参数化建模,然后进行装配和运动仿真分析,模拟机床的运动情况,得出机床中关键部件的运动特性曲线。通过所述方法验证了所建立模型的正确性,可以直观观察产品在设计中可能存在的不合理因素,进而对产品模型进行不断修改与完善,直到符合预期要求。采用所述方法,有利于提高产品的质量和性能,并缩短开发周期。
[1]李长河,蔡光起.并联机床发展与国内外研究现状[J].青岛理工大学学报,2008,29(1):7-13,67.
[2]刘冲,马廷戎.浅谈UG运动仿真在机械设计中的应用[J].电子制作,2013(18):49.
[3]邓婕.浅谈UG软件在机械设计中的应用与研究[J].露天采矿技术,2012(2):61-63.
[4]宋强.基于UG的车床纵向进给机构设计与运动仿真[J].现代制造技术与装备,2016(8):1-2,19.
[5]史永芳,朱茂华.基于UG的汽车传动轴的三维建模与仿真[J].现代制造技术与装备,2014(6):65-67.
[6]赵昌龙.并联机床的运动仿真研究[J].机床与液压,2014(15):159-161.
[7]麓山文化.UG NX10.0中文版从入门到精通[M].北京:机械工业出版社,2016.
[8]杨梅.基于UG的液压式步进翻转冷床运动仿真分析[J].装备机械,2016(3):59-61.
[9]张霏霏,吴洪涛,严伟.三维平动并联机床的运动分析[J].机械制造,2013,51(12):17-20.
[10]郑小民,邹晓晖,高健,等.4-PUS/PUU并联机构在机床上的应用[J].机械制造,2015,53(11):20-22.
