一种优化的基于软件定义车联网的路由方法
2018-01-23高德云
张 雪,高德云
(北京交通大学 电子信息工程学院 下一代互联网互联设备国家工程实验室,北京 100044)
1 概 述
消息的快速和及时传输对于车联网至关重要。传统的路由协议如贪婪周边无状态路由(GPSR),在选择下一跳转发节点时存在局部最小化的问题。尽管有部分文献对此进行了改进,能够根据车速、方向等信息选择转发节点,并实现负载均衡,但会造成控制开销的明显提升,并且需要额外传输层协议的配合。
传统的移动蜂窝网络技术具有低延迟和覆盖广的优势,但是由于车辆的高速移动性,在车辆和基站之间存在频繁的网络切换,路由不稳定,网络缺乏良好的鲁棒性[1]。
针对车联网的高速移动场景,国际电子工程学会(IEEE)提出了WAVE[2]协议。该协议是应用于车与车、车与路边单元之间数据交换的通信协议,主要由802.11p无线局域网标准和IEEE 1609协议族组成[3]。在物理信道上,分为控制信道和服务信道。WAVE协议结构如图1所示[4]。
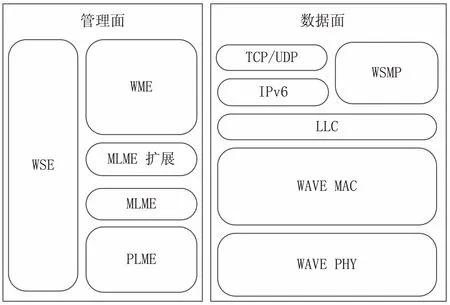
图1 WAVE/IEEE 1609网络模型
在WAVE模式下得到认可的具有代表性的路由协议主要有DSR、GPSR、AODV和DSDV[5]。但网络性能受节点密度和移动速度影响严重。
针对上述问题,为了更好地解决车联网中的数据通信和路由问题,提升网络的鲁棒性,结合蜂窝网和IEEE 802.11p无线局域网络,引入软件定义网络(Software Defined Network,SDN)架构,实现对车联网和核心网的统一管理。基于智能SDN的管理和协议,在无线接入部分提出控制和数据分离、上行和下行分离、无限资源动态适配等技术,提高频谱效率和能量效率;在中央控制器实现高效的内容分发和快速的路由策略,增加数据吞吐率和网络可扩展性。同时,通过车联网和中央控制器之间的资源共享和联合优化,还能提供网络功能虚拟化和个性化业务定制,实现SDN系统与异构车联网的深度融合。并通过仿真,对提出的路由协议的性能进行测试与分析。
2 基于SDN的异构车联网网络架构
软件定义网络以一种系统的方式控制网络,能将网络中路由器的控制功能分离到中央控制器。中央控制器是SDN架构实现路由功能的核心,它根据交换机上报的信息为所有的数据流选定路由[6]。这种基于流的路由架构带来了较高的灵活性和可编程能力。将SDN和车联网络进行融合,为网络运行更加精细的路由算法提供了可能,将弥补原来所缺少的灵活性和可编程能力,简化网络管理,改善V2V和V2I服务。
文中提出的异构车联网架构结合了IEEE 802.11p的车载自组网络和基于LTE设施的蜂窝网络,利用不同的无线技术完成WAVE协议族中管理面和数据面的消息转发。管理面使用LTE长距离无线技术,数据面使用802.11p无线技术。每个车辆都具备双接口的车载单元OBU(On-Board Unit),能够支持V2V和V2I通信。车辆节点之间通过802.11p通信,车辆和基站通过蜂窝网络通信。网络架构如图2所示。
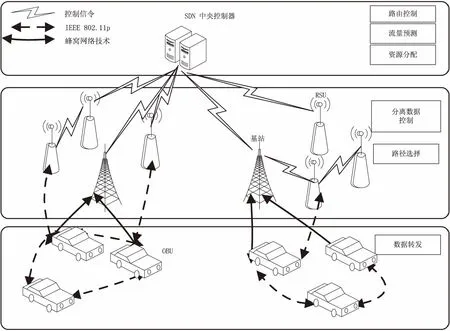
图2 基于SDN的异构车联网架构
软件定义车联网(Software Defined Vehicular Ad-hoc NETwork,SD-VANET)通过在车联网中引入SDN架构,解耦网络中的数据面和控制面,可以逻辑化地中央管理网络状态,进而为车联网提供自适应性、可编程能力以及规模可伸缩性。网络架构在逻辑上分为基础设施层和决策控制层。前者由车联网和核心网组成,后者由路边单元(Road Side Unit,RSU)控制器和中央控制器组成。
2.1 基础设施层
车联网中的车辆节点通过基站或者RSU与核心网连接,核心网通过数据网关与外部的互联网连接。在车联网中,存在多种接入方式,包括4G蜂窝网络和IEEE 802.11p(WAVE)无线接入方式。各个无线接入点在RSU控制器的控制下,可以满足车联和基站的多重接入方式,比如控制与数据分离、业务数据上下行分离、多点协同传输等。核心网中的中央控制器负责流表项的更新,下达路由转发、内容存取和安全策略等。
OBU:普通车辆节点,由中央SDN控制器控制,归属于数据面元素。每个车辆节点都具有IEEE 802.11p(WAVE)接口和LTE接口,运行在IEEE 802.11p协议下只关注数据面。数据面负责数据包的转发,并接受来自中央控制器的控制消息,依此来执行数据包的转发行为。
2.2 决策控制层
RSU控制器和中央控制器通过SDN的东西向接口互联,完成车辆请求和业务要求的信令传输。彼此通过服务接口和中央控制器连接,上传数据记录,获取基于各种功能引擎实现的快速决策结果。
中央控制器:软件定义车联网架构中的逻辑控制中心,控制整个系统的网络行为。
RSU:道路两侧部署的接入设备,由SDN控制器控制。每个RSU单元都运行一个SDN代理模块和IEEE 802.11p(WAVE)协议栈,WAVE协议栈本身分为数据面和管理面。数据面负责数据包的转发,管理面存储道路的信息和车辆自身的信息,并接受来自中央控制器的控制消息,并依此执行数据包的转发行为。
2.3 软件定义车联网运行模式
SDN架构运行在混合模式下,除了中央控制器具备决策能力之外,RSU也具备控制能力[7]。当车辆到中央控制器的无线信道中断时,RSU的代理控制器将拥有决策能力来处理路由转发规则。在系统暂时失去与中央控制器的连接时,RSU控制器将临时发挥路由决策和控制能力,混合式的SDN运行模式能维持网络的正常运行。中央SDN控制器只发送定义了普遍行为的规则,RSU代理控制器来决定转发数据包和处理flow等级,数据在被发送前,由RSU代理控制器来决定用户数据流到网络中的访问。
有了中央控制器和RSU代理控制器的支撑,SDN能和异构车联网络进行全面融合,从而实现车联网和中央控制器的高效控制和联合优化。
3 基于SDN的异构车联网路由方案
SDN架构是获取网络拓扑的一个有效手段,利用集中式控制器,能够在保证控制开销可接受的前提下,运行更加精密的路由算法来充分利用网络资源,提升网络性能[8]。
车联网多路径拓扑中存在不平衡的车流密度和低效的网络利用率。现有的车联网路由协议性能制约了消息转发的效率和可靠性。为了解决贪婪周边转发路由协议中存在的局部最小化问题,基于软件定义车联网架构,提出一种优化的路由转发策略,并引入优先区域和黑洞区域的概念。
每个优先区域通过3个参数来描述:位置、相对的RSU和其他距离。优先区域需要满足下列条件:到RSU的距离比其他OBU到RSU的距离短;它到其他OBU的距离比到其他OBU到RSU的距离短;它和其他OBU之间的距离大于其他距离。车辆发送消息时,将优先选择位于优先区域内的车辆作为下一跳转发节点。
黑洞区域也由三个参数表征:位置、参考RSU和其他距离。由于传统的GPSR路由算法在选择下一跳时遵循右手准则,存在局部最小化问题,这里将存在转发空洞的区域定义为黑洞区域。当OBU进入黑洞区域时,将不能作为消息转发的邻居节点。
3.1 软件定义车联网路由协议
SDN架构的一个显著特点是控制器可以通过Openflow[9]协议获得全网的拓扑结构。城市道路环境下,道路是规则固定的,RSU位置在地图上是已知的,通过预先计算可以获知每个RSU的优先区域和黑洞区域。
车辆和RSU交换beacon消息来学习关于周围邻居的信息,邻居信息会周期地更新给SDN控制器,控制器由此构建节点联通图,并依此做出决策。在消息源车辆发出消息前,SDN中央控制器会通过收集的信息、结合道路环境信息,计算出当前网络环境下从源节点到目的节点的优先区域和黑洞区域,为数据的路由做出决策,并下达指令和路由信息给RSU控制单元和SDN无线节点。
选出优先区域和黑洞区域的计算流程:每个OBU周期性发送beacon消息,上报自己的位置、速度和环境信息,控制器比较并且计算出当前情况下的优先区域和黑洞区域。车辆节点遍历自己的流表,获知链路上可用的优先区域和黑洞区域。不在RSU覆盖范围下的OBU执行以下算法选择下一跳:OBU发现最近的RSU(欧氏距离);OBU确认关于RSU的优先区域和黑洞区域;OBU找到最近的优先区域,如果存在的话,选择该优先区域内的OBU作为通向最近RSU的下一跳。如果不存在优先区域或者优先区域不可达的话,OBU选择最近的不在黑洞区域范围内的OBU,以及距离前述RSU最近的邻居OBU,从这些邻居OBU中选择距离最近的RSU最近的OBU作为下一个可用的中继节点。如果不存在满足条件的邻居OBU的话,就没有下一个中继可以选择。
优先区域和黑洞区域计算流程如图3所示。
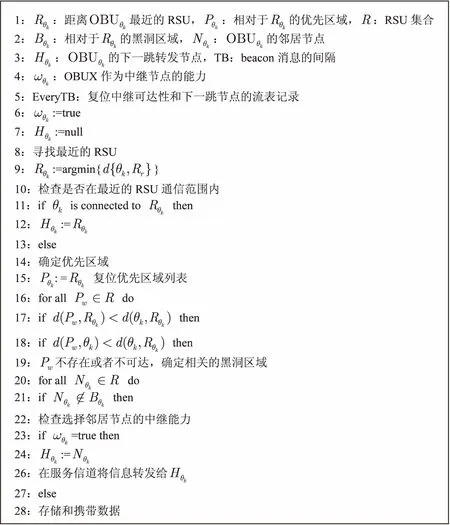
图3 优先区域和黑洞区域计算算法
3.2 软件定义车联网路由修复策略
网络正常运行时,RSU收集来自周边车辆的位置、速度信息,以及道路环境信息[10]。RSU周期性地计算和上报周边车辆和道路信息情况,中央控制器根据这些参数计算和选择最佳的路由。通过下发控制指令给RSU控制器和车辆节点,将后续流量导向非拥塞的链路来保证网络吞吐量。同时,RSU代理控制器会将网络中的优先区域和黑洞区域信息存储到本地。
当网络与中央控制器失去连接时,RSU代理控制器将充分发挥决策能力,利用存储的优先区域和黑洞区域信息,引导和控制消息的转发。当网络再次恢复与中央控制器的连接时,RSU代理控制器将继续接收中央控制器下达的控制命令,并更新自己的流表选项。
4 仿真和性能分析
4.1 场景和参数
使用OMNET++和SUMO进行仿真,并在veins中引入Openflow扩展。SUMO生成道路网格网络,代表覆盖面积1 000 m*1 000 m,每个单元格200 m。SDN控制器位于仿真场景的中央[11-14]。每个OBU有多个无线接口:802.11p用于短距离通信,长距离使用LTE通信。节点随机分布,数据包生成速率是4包/s,每个数据包大小是1 024字节。Beacon消息的间隔是500 ms。SDN无线节点以1 s间隔向SDN控制器更新邻居消息。每次仿真运行10次取平均值,每次仿真时长5 min。
仿真模型最上层代表整个通信网络。下层的Annotations模块提供交通流量仿真,信道控制模块负责切换信道。
4.2 仿真结果分析
4.2.1 基于SDN异构车联网的路由与传统车联网路由的比较
文中提出的软件定义车联网路由算法,通过RSU控制器来收集网络状态信息,中央控制器汇总信息,能立即检测出网络拓扑的变化,并做出最优的路由转发策略。
改进路由算法与传统的GPSR路由算法在数据包传递率上的比较如图4所示。由图4可以看出,改进算法优于传统的GPSR路由算法。
4.2.2 SDN控制器连接中断时的修复机制
当网络与SDN中央控制器的连接中断时,中央控制器不再更新路由规则,数据包传递率急速下降。并且由于车辆的移动性,车速越快,路由规则的时效性越迟滞,性能下降越明显。在SUMO生成的仿真网格道路环境下,使用相同的实验参数,当控制器的中断时间为60 s时,实验结果如图5所示。
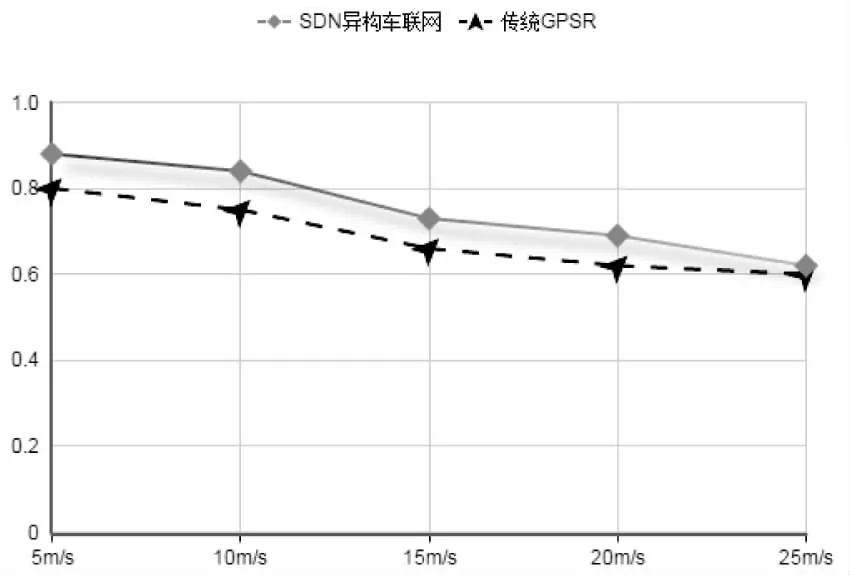
图4 优化前后路由方法的性能对比
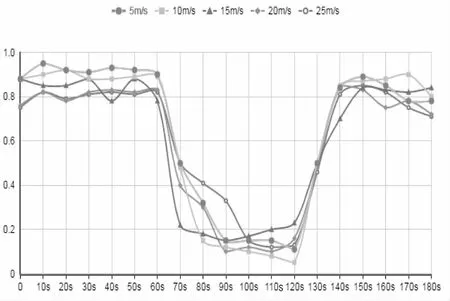
图5 原有路由协议失去SDN控制时的数据包传递率
同样的场景下,当SDN中央控制器网络中断时,触发备选路由机制。RSU代理控制器能通过收集周边网络环境信息,利用SDN中央控制器之前下发的控制指令,临时发挥路由决策能力,维持数据包传递率在较好的水平。图6展示了基于SDN的路由修复机制的数据包传递率。
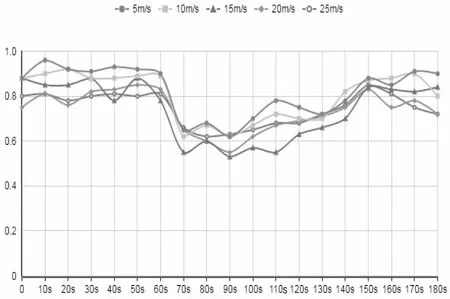
图6 修复机制下的数据包传递率
通过仿真,比较和归纳了基于SDN的路由方案与原有车联网路由方案的差异。实验结果表明,该算法在提高数据包传递率和路由的修复能力方面都优于传统的车联网路由算法。
5 结束语
针对车联网中现有路由协议的不足,提出了一种基于SDN的异构车联网路由协议。车辆节点周期性地更新邻居信息,经RSU上报给SDN中央控制器。当网络中车辆密度变化影响数据包传递时,由中央控制器做出路由决策,并在系统失去与SDN中央控制器的连接时,采用备选路由机制。该方法能有效提高网络中数据包的传递率,更好地满足车联网中对消息传递率和可靠性的要求。此外,软件定义车联网也能更好地适应变化的网络状况和需求。
[1] Cunha F,Villas L,Boukerche A,et al.Data communication in VANETs:protocols,applications and challenges[J].Ad Hoc Networks,2016,44:90-103.
[2] Ucar S,Ergen S C,Ozkasap O.Multihop-cluster-based IEEE 802.11 p and LTE hybrid architecture for VANET safety message dissemination[J].IEEE Transactions on Vehicular Technology,2016,65(4):2621-2636.
[3] 肖 晶,刘 伟,唐 伦.基于任务分配模型的车载自组织网络路由算法[J].计算机工程,2017,43(2):6-15.
[4] Saravanan D, Janakiraman S, Roseline S S, et al. Efficient route discovery in VANET using binary bat approach[C]//Proceedings of the international conference on soft computing systems.[s.l.]:[s.n.],2016:529-536.
[5] 顾宪锋,许道峰,张满超,等.软件定义网络二层路由策略[J].指挥信息系统与技术,2016,7(2):78-83.
[6] Sezer S,Scott-Hayward S,Chouhan P K,et al.Are we ready for SDN? Implementation challenges for software-defined networks[J].IEEE Communications Magazine,2013,51(7):36-43.
[7] 廉 景.一种行进启发式节省能量的地理位置路由[J].信息通信,2016(7):52-53.
[8] 郑小平,华 楠.软件定义光/包交换混合网络的统一控制架构及关键技术研究[J].中兴通讯技术,2015,21(4):2-5.
[9] Jervis M,Sen M,Stoffa P L.Network innovation using openflow:a survey[J].IEEE Communications Surveys & Tutorials,2014,16(1):493-512.
[10] 柴燕涛,董德尊,张鹤颖,等.基于SDN架构的高性能网络拥塞避免策略[J].计算机工程与科学,2016,38(1):1-10.
[11] Noori H,Olyaei B B.A novel study on beaconing for VANET-based vehicle to vehicle communication:probability of beacon delivery in realistic large-scale urban area using 802.11 p[C]//International conference on smart communications in network technologies.[s.l.]:IEEE,2013:1-6.
[12] Liu K,Ng J K Y,Lee V C S,et al.Cooperative data scheduling in hybrid vehicular ad hoc networks:Vanet as a software defined network[J].IEEE/ACM Transactions on Networking,2016,24(3):1759-1773.
[13] 彭 军,马 东,刘凯阳,等.基于LTE D2D技术的车联网通信架构与数据分发策略研究[J].通信学报,2016,37(7):62-70.
[14] 谢 永,吴黎兵,何炎祥,等.无间隙的车联网协助下载方法[J].通信学报,2016,37(1):180-190.