Bayer滤波型彩色相机调制传递函数测量方法∗
2018-01-16段亚轩刘尚阔陈永权薛勋赵建科高立民
段亚轩 刘尚阔 陈永权 薛勋 赵建科 高立民
1)(中国科学院西安光学精密机械研究所,西安 710119)
2)(中国科学院大学,北京 100049)
1 引 言
随着光电子技术发展及深入应用,彩色相机在航天遥感、空间对地观测、环境监测、城市建设等领域应用越来越广泛.Bayer滤波型彩色相机获取彩色图像的主要方式为在单片面阵电荷耦合器件(charge-coupled device,CCD)或者互补金属氧化物半导体器件(complementary metal oxide semiconductor,CMOS)像元表面前置入按Bayer规律排列的彩色滤波阵列(color filter array,CFA)来实现[1].为了便于论述,后文将“Bayer滤波型彩色相机”简称为“彩色相机”.彩色相机的探测器每个像元只获取红(R)、绿(G)或蓝(B)一种颜色分量,然后通过插值算法得到其他两种颜色的信息,最后恢复出彩色图像.显然,彩色相机获取彩色图像的过程相比黑白相机会造成进一步的像质退化.如何高精度测量及评价彩色相机成像质量是一个亟待解决的问题.
调制传递函数(modulation transfer function,MTF)作为成像质量的评价手段,它能更全面、客观地评价相机的成像性能[2−6].目前测量彩色相机MTF的方法有:狭缝法[7−9]、条纹板法[10]和刀口法[11−15].狭缝法为通过对线扩展函数(line spread function,LSF)傅里叶变换得到MTF,此方法对光源的亮度目标狭缝的两个刃边直线度和平行度,狭缝的宽度和厚度都有很高的加工精度要求,且测量结果要扣除狭缝宽度引入的影响[16−18].条纹板法为根据被测相机的参数设计制作几组特定线宽的黑白条纹板测量相机特定空间频率处的MTF值,此方法测量精度易受条纹靶对比度和条纹靶与被测相机探测器阵列对准精度的影响,且无法一次给出随空间频率变化的MTF曲线,故不能全面客观地评价被测相机的成像性能.同时,测量不同参数的相机需重新设计制作靶板,测量成本高.相比于狭缝法和条纹板法,刀口法只需要一条刃边,这极大地降低了加工精度要求.刀口法通过对刃函数(edge spread function,ESF)进行微分运算得到LSF,再通过傅里叶变换得到MTF.由于相机镜头往往对刀口靶成缩小像,采用直刀口法使得ESF欠采样,导致相机MTF计算结果产生频谱混叠[19−21].为此,ISO12223标准[22]规定了采用斜刀口法测量相机MTF的方法,此方法通过将探测器像素沿着刀口刃边的倾斜方向投影得到上采样刃函数,从而解决了直刀口法所遇到的问题,但是此方法测量精度受采样率和刀口刃边倾斜角度误差的影响[23,24].综上对传统相机调制传递函数测量方法进行分析,都在测量要求或者测量精度方面存在缺陷.同时,彩色相机R,G,B三基色响应对彩色MTF测量结果的影响尚未有相关文献报道.为了实现对彩色相机全频段MTF上采样的高精度测量,本文提出了一种采用旋转刀口靶测量彩色相机MTF的方法和计算算法.理论分析了刃函数采样率和刀口刃边倾斜角度误差对MTF测量精度的影响.通过旋转刀口靶来逼近刀口刃边倾斜最佳角度,从而降低刃函数非均匀采样对测量结果的影响.为了扣除测试光源光谱辐射能量分布对彩色相机MTF测量结果的影响,理论推导了彩色相机三基色MTF权重因子模型,并进行了实验定标.通过搭建试验装置和条纹板法比对验证了本文所提方法的有效性.
2 理论模型
彩色相机采集到斜刀口靶的“马赛克”图像,通过彩色插值算法[25−29]可得到R,G,B三基色的斜刀口靶图像,如图1所示.彩色相机对刀口靶R基色的响应函数ESFR(x)可以表示为阶跃函数step(x)与相机R基色响应函数hR(x)的卷积,即

以R基色刀口靶图像为例,来阐述斜刀口法测量彩色相机MTF的原理.彩色相机探测器x,y方向像素大小均为P,刀口刃边与探测器像素列相交成一定的角度θ,如图2所示.

将斜刀口靶刃边用直线方程表示如下:式中,kR为R基色刃边斜率,kR=1/tanθ;b为刃边与y轴相交的截距.将所有像素沿着刃边倾斜方向投影,列方向上间隔为p的两个相邻像素点对应垂直刃边方向上间隔为psinθ的采样点,而行方向上间隔为p的两个相邻像素点对应垂直刃边方向上间隔为pcosθ的采样点.相比直刀口法得到刃函数的采样间隔p,斜刀口法得到的刃函数的采样间隔p′=p·ε.ε满足

图1 (网刊彩色)将彩色相机采集的斜刀口靶“马赛克”图像彩色插值得到R,G,B三基色斜刀口图像Fig.1.(color online)After the mosaic image of slanted knife-edge is obtained by the color camera based on Bayer filtering,the R,G,B channels images are obtained by the bilinear interpolation.

图2 (网刊彩色)将R基色刀口靶图像所有像素沿着刀口刃边倾斜方向投影得到上采样刃函数ESFRFig.2.(color online)The super-sampled edge spread function ESFRis obtained by projecting the sampling points of R channel image in the tilt direction of the knife-edge.

通过调整刀口刃边倾斜角度θ,理论上可以得到任意小的采样间隔,从而得到彩色相机R基色上采样刃函数ESFR(u).利用一维梳状函数对其抽样,得

对R基色刃函数ESFR(u)式进行微分运算可得上采样线扩散函数LSFR(u)为

将(5)式的微分运算形式通过卷积形式表达为

将(4)式代入(6)式得:

对(7)式进行傅里叶变换并取模得到调制传递函数MTFR,mea(f)为

式中,F()为傅里叶变换算子;HR(f)为彩色相机R基色频率响应函数.根据耐奎斯特(Nyquist)采样定理,采样倍率因子ε应满足

式中,fc为相机耐奎斯特频率.如果采样倍率因子ε满足(9)式,则MTFR,mea(f)的频谱不会发生混叠,从而将(8)式可化简为

则被测彩色相机R基色MTFR(f)为

通过(11)式计算得到的被测彩色相机R基色MTF结果修正了微分运算引入的影响. 同理根据(2)—(11)式可分别计算得到被测彩色相机G基色MTFG(f)和B基色MTFB(f).
认为不同波长的波动之间是严格非相干的,这样才能保证彩色相机对强度的传递是线性系统.通过(12)式将R,G,B三基色MTF结果加权得到彩色相机调制传递函数MTFcolour(f)为

式中,CR,CG和CB是彩色相机R,G,B三基色权重因子.
3 仿真及精度分析
3.1 采样率对MTF计算结果的影响
传统斜刀口法对刃函数ESF(u)进行快速傅里叶变换(FFT)计算前,必须对其线性均匀采样.从图2中可以看出,采样间隔满足如下关系:

式中采样率m为大于1的整数.将(13)式化简可得刀口靶刃边倾斜角度θ与采样率m之间关系满足:

调整刀口靶刃边与探测器像素组成的列相交的角度,可使采样率m取不同整数,从而实现对刃函数不同采样率的采样.当采样率m分别为2—9的整数时,理论仿真了采样率对MTF计算结果的影响.认为照明刀口靶光源为均匀光源,刀口靶图像透光部分灰度值为1000,不透光部分灰度值为100,探测器像元尺寸D为10µm,即耐奎斯斯特频率fc为50 lp/mm.仿真的无噪声标准刀口靶图像如图3(a)所示,刀口靶刃边与探测器像素组成的列相交成的角度θ为14.0362°(m=4).当采样率m取值为2—9的整数时,MTF计算结果如图3(b)所示.
从图3(b)中可以看出,当采样率m值为2时,在空间频率(0—50)lp/mm范围内MTF计算结果与理论值极差为0.08,随着空间频率变大,差异越来越大,并在空间频率88 lp/mm处出现截止,这是由于刃函数ESF欠采样造成的.当采样率m取值大于2时,MTF计算结果在空间频率(0—100)lp/mm范围内极差为0.01,MTF计算结果几乎不受采样率的影响.
考虑探测器实际受噪声的影响,在标准刀口靶图像上添加不同量级的高斯噪声,信噪比范围为20—50 dB.图4(a)为当刀口靶图像信噪比为20 dB时采样率m对MTF计算结果的影响,图4(b)为当刀口靶图像信噪比为20—50 dB时,采样率m取不同整数值的MTF计算结果在空间频率(0—100)lp/mm范围内与无噪声计算结果偏差.

图3 (网刊彩色)标准无噪声的刀口图像(a)和不同采样率下的MTF计算结果(b)Fig.3.(color online)(a)Standard knife-edge image without noise,(b)MTF calculation results at different sampling rate.

图4 (网刊彩色)采样率对MTF计算结果影响(信噪比20 dB)(a)和不同信噪比下采样率对MTF计算结果影响(b)Fig.4.(color online)(a)Impact of sampling rate on MTF calculation results(SNR is 20 dB);(b)impact of sampling rate on MTF calculation results under different SNR.
从仿真结果可以看出,当图像信噪比大于40 dB时,采样率m为不同整数的MTF计算结果与无噪声MTF值偏差小于0.05.随着图像信噪比变小,采样率m值越大,MTF计算结果与无噪声MTF值偏差越大.当图像信噪比为20 dB,采样率m值为9时的MTF计算结果与理论无噪声的MTF值偏差为0.32.这是由于随着刃函数采样率m变大,沿着刀口靶刃边y=k·x+b投影取平均的像素点变少,从而导致测量结果易受探测器噪声的影响.当采样率m取值为4,5和6,且图像信噪比范围在30 dB到50 dB之间时,MTF计算结果之间偏差小于0.03.为了平衡采样率和探测器噪声对MTF计算结果的影响,采样率m建议值为4.
3.2 刃边倾斜角度误差对MTF计算结果影响
根据(14)式,当刀口靶刃边实际倾斜角度与理想标准角度(采样率m为整数)存在误差Δθ,使得实际采样率m′为

将(15)式按泰勒级数展开,并忽略高次项后得到近似表达式为

将实际采样率m′与理想整数采样率m之间偏差记为Δm,

根据(16)和(17)式可得

将所有像素沿着含有角度误差的刀口靶刃边倾斜方向投影将得到非均匀采样的刃函数ESF,且随着理想整数采样率m值变大,刀口靶刃边倾斜角度误差对刃函数采样率的影响越来越大.当理想整数采样率m取值为4,刀口靶刃边倾斜角度与理想标准角度偏差Δθ在±0.1°范围时,其对MTF计算结果的影响如图5所示.

图5 (网刊彩色)刀口靶刃边倾斜角度误差对MTF计算结果影响Fig.5.(color online)Impact of angle error of knife edge on MTF calculation results.
从图5中可以看出,刀口靶刃边倾斜角度误差引入的刃函数非均匀采样对相机MTF计算结果影响很大,导致计算结果在空间频率尺度上出现压缩而提前截止.当刃边倾斜角度误差在±0.02°范围内时,计算结果与理想值在空间频率域(0—fc)范围内极差优于0.02.当刀口靶刃边倾斜角度误差为0°时,在相机空间频率域(0—fc)范围内MTF所包围的面积最大,即积分能量达到最大.通过旋转刀口靶,计算刀口刃边倾斜不同角度下的MTF积分能量来寻找刀口靶刃边最佳倾斜角度,可降低刃函数非均匀采样对计算结果的影响,从而得到被测相机的最佳MTF结果.
4 计算算法
为了实现对彩色相机MTF的高精度测量,本文提出了采用旋转刀口靶测量彩色相机MTF的计算算法.具体算法流程图如图6所示,主要有4个步骤.第1步计算刀口刃边倾斜斜率;第2步投影并获取彩色相机R,G,B三基色上采样刃函数ESF;第3步计算彩色相机三基色MTF,并对其加权计算得到彩色相机MTF;第4步刀口刃边倾斜最佳角度逼近,并输出彩色相机MTF最佳结果.
第1步具体处理过程为根据双线性插值算法得到R,G,B三基色刀口靶图像IR,IG和IB;对各基色图像选取相同的计算区域L×H,L为行,H为列.以R基色刀口靶图像为例,选取的R基色图像Iij(i=1,2···L;j=1,2···H;)内的每一行灰度值通过微分运算得到线扩展函数LSFi(x,y).通过加权质心算法计算得到每一行线扩展函数的质心位置(xi,yi).将每一行质心位置根据y=K·x+b进行数据拟合,通过最小二乘法计算得到R基色刀口靶图像刃边倾斜斜率K.
第2步具体处理过程为计算R基色刀口靶图像各像素点到刀口靶刃边的距离为

即R基色上采样刃函数ESFk为

式中,Δd=pε;bin()为矩形函数,当|d(i,j)−k·Δd|≤ Δd/2时,bin(d(i,j)−k·Δd)为1,否则为0;sk为满足条件的有效像素个数.

图6 彩色相机调制传递函数计算流程图Fig.6.The processing steps from the Bayer image of knife-edge to the color camera super-sampled MTF.
第3步具体处理过程为对R基色的上采样刃函数ESFk通过微分运算得到各基色LSFk,再对其汉宁窗滤波,并利用快速傅里叶变换得到R基色MTFmea,具体计算公式为

式中,C为归一化因子,使得MTFmea(0)=1.W为汉宁窗函数:

式中,N为刃函数ESFk采样总数.将计算得到MTFmea(f)结果根据(11)式扣除微分运算引入的影响得到R基色MTFR(f).由于在空域对刃函数进行了拉伸,空域的展宽对应于频域的压缩,这将导致计算的MTF在频域的尺度变化,故对刀口靶倾斜刃边引入的MTF在频域的压缩进行校正,校正的R基色MTFcorr,R(f)为分别对G,B基色刀口靶图像按照算法第1步—第3步计算得到MTFcorr,G(f)和MTFcorr,B(f),再利用(12)式将R,G,B三基色MTF计算结果加权合成得到彩色相机MTFcolour(f).

第4步具体处理过程为电动控制旋转刀口靶在初始估计位置±0.1°范围内按0.02°间隔旋转,并根据算法第1步—第3步计算刀口靶刃边倾斜不同角度的彩色相机MTFcolour,i,并对其在空间频率域(0—fc)范围内积分,得到彩色相机MTF积分能量值Si为

最大Si所对应的刀口靶刃边倾斜角度为最佳角度,刀口靶旋转到此位置处计算得到彩色相机最佳MTF结果.
5 试验及分析
5.1 R,G,B三基色MTF权重因子定标
彩色相机MTF测试结果受测试光源光谱辐射能量分布P(λ)和彩色相机R,G,B三基色响应S(λ)的影响,必须在测试光源照明下对被测彩色
相机三基色MTF权重因子进行定标.根据国际照明委员会(CIE)在1931年规定三基色的波长为700 nm(R),546.1 nm(G)和435.8 nm(B).彩色相机三基色MTF权重因子可以表示为

光源光谱辐射分布测试现场如图7(a)所示,测试光源为氙灯,积分球直径为300 mm,出光口为20 mm,出光口均匀性优于98%.光源在正常工作电压下,利用光谱辐射度计(FSP350-105P)测量400—700 nm内光谱辐射能量分布P(λ)如图7(b)所示.根据光源光谱辐射强度分布测量结果,可得到R,G,B三基色辐射强度分别为P(R)=0.399,P(G)=0.256和P(B)=0.069.

图7 (网刊彩色)光源光谱辐射分布测试现场(a)和光源光谱辐射能量分布测量结果(b)Fig.7.(color online)(a)Spectral radiance distribution of source test;(b)result of spectral radiant distribution of source.
彩色相机三基色响应S(λ)主要受Bayer滤波片的光谱透过率和探测器的光谱响应影响.在氙灯积分球光源照明下,被测彩色相机R,G,B三基色归一化响应为S(R)=0.4673,S(G)=0.3505和S(B)=0.1822. 根据(25)式被测彩色相机三基色MTF归一化权重因子为:CR=0.2261,CG=0.2643和CB=0.5096.
5.2 彩色相机MTF测量及分析
5.2.1 测量装置
为了验证方法的准确性及普适性,对某彩色相机MTF分别利用条纹板和刀口靶进行了测量.彩色相机MTF现场测量如图8所示.测量装置包括氙灯积分球光源、靶板(条纹板和刀口靶)、平行光管和被测彩色相机.测量装置具体参数为:平行光管焦距为550 mm;彩色相机探测器像元尺寸为7.4µm;条纹板上刻有线宽为325.6µm和162.8µm的亮暗条纹,分别对应被测彩色相机耐奎斯特频率fc(68 lp/mm)和空间频率fc/2(34 lp/mm);刀口靶直线度为1µm;电控旋转台角度控制精度为10′′.

图8 (网刊彩色)彩色相机MTF测试现场Fig.8.(color online)Test setup for color camera MTF measurement.
5.2.2 条纹板法
首先被测彩色相机连续采集50帧暗背景图像,对其取平均得到暗背景DNbackground.然后将条纹靶板置于平行光管焦面处,且由积分球光源均匀照明,被测彩色相机置于平行光管出光口处.调整彩色相机位置使相机观察到的条纹像位于探测器所采集图像的中心附近,选定条纹板像最清晰时采集图像,被测彩色相机采集条纹板图像如图9所示.
根据双线性插值算法可得彩色相机R,G,B三基色条纹板图像,对于R基色条纹板图像读取特定线宽亮条纹的灰度响应值DNbright,暗条纹灰度响应值DNdark,则被测彩色相机R基色特定频率处MTF值为

同理计算得到被测彩色相机G,B基色特定频率处MTFG和MTFB,再通过被测彩色相机的三基色MTF权重因子,利用(12)式计算得到被测彩色相机特定频率处的MTF值.被测彩色相机耐奎斯特频率fc处MTF值为0.290,空间频率fc/2处MTF值为0.687.
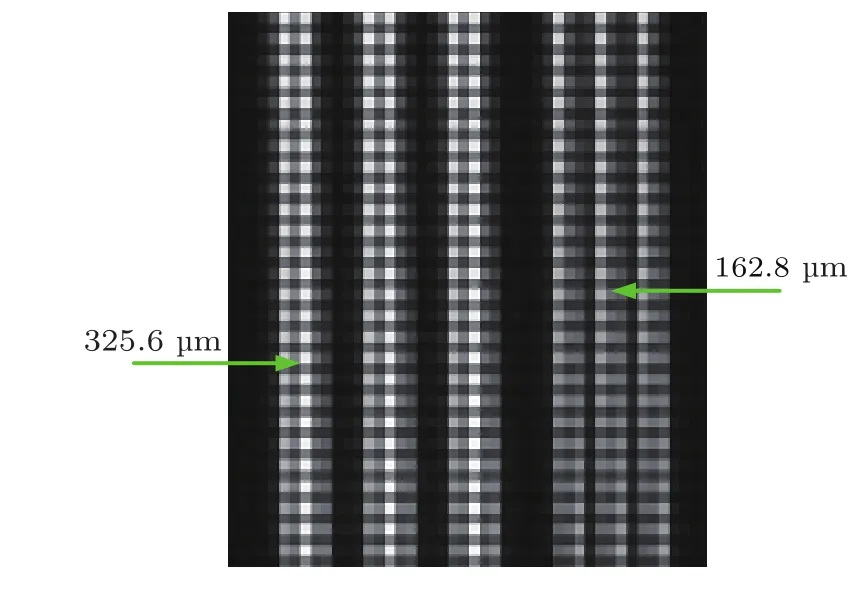
图9 (网刊彩色)条纹板图像Fig.9.(color online)Bayer color image of fringe target.
5.2.3 旋转刀口靶法
将可旋转的刀口靶置于平行光管焦面处,且由积分球光源均匀照明.被测相机置于平行光管出光口处,电动控制旋转刀口靶,同时被测彩色相机采集刀口图像.利用刀口靶刃边拟合算法实时计算刀口靶刃边倾斜角度θ.受探测器噪声、刀口靶刃边直线度和算法精度的影响,刃边倾斜角度计算误差为0.02°. 当θ为14.045°(与理论角度14.0362°(采样率m=4)偏差小于0.01°)时,将此位置作为初始估计位置.被测彩色相机采集刀口靶图像,并根据双线性插值得到彩色相机R,G,B三基色刀口靶图像如图10所示.
电动控制刀口靶在初始估计位置±0.1°范围内以0.02°为间隔旋转,同时被测彩色相机采集图像,并计算刀口靶旋转到每个角度处彩色相机MTF,测量结果如图11(a)所示.在初始估计位置±0.1°范围内彩色相机MTF曲线在空间频率(0—fc)范围内积分能量如图11(b)所示.

图10 (网刊彩色)R,G,B三基色刀口靶图像Fig.10.(color online)R,G,B colors images of knife-edge.

图11 (网刊彩色)刀口靶刃边倾斜不同角度彩色相机MTF测量结果(a)和积分能量结果(b)Fig.11.(color online)(a)Color camera MTF results under different tilt angle of knife-edge;(b)MTF power under different tilt angle of knife-edge.
当刀口靶刃边倾斜角度为14.025°时,MTF曲线在空间频率(0—fc)范围内积分能量达到最大,可认为此角度为最佳倾斜角度.此角度与计算得到的理想角度14.045°下的彩色相机MTF计算结果在空间频率(0—fc)范围内极差为0.05.由此可见,通过MTF曲线在空间频率(0—fc)范围内积分能量来进一步逼近刃边倾斜最佳角度,可极大地提高彩色相机MTF测量精度.图12为刀口靶旋转到最佳倾斜角度下彩色相机R,G,B三基色和彩色MTF测量结果.彩色相机R,G,B三基色和彩色MTF测量结果的偏差在低频部分偏差较小.随着空间频率增大,在空间频率(30—55 lp/mm)范围内,被测彩色相机R基色和B基色MTF值高于加权合成的彩色MTF值,极差分别为0.019(R)和0.01(G).B基色MTF值低于加权合成的彩色MTF值,极差为0.017(B).这主要是由于测试光源光谱辐射能量分布中R,G,B三基色对应波长的辐射强度不同及被测彩色相机对三基色响应不同造成的.测试光源在紫外波段的光谱辐射强度相比较低,从而造成B基色斜刀口靶图像对比度不高.同时,B基色刃函数在进行微分运算得到线扩展函数的运算过程中对噪声进行了放大,使得B基色MTF测量结果在中高频部分与R,G基色MTF测量结果偏差较大.利用实验定标的三基色MTF权重因子加权计算得到的彩色相机MTF结果,其扣除了测试光源光谱辐射能量分布引入的影响.
表1为采用旋转刀口法和条纹板法测量彩色相机MTF比对结果.采用旋转刀口法测量彩色相机R,G,B三基色MTF与条纹板法测量结果在空间频率fc/2处极差分别为0.026(R),0.048(G)和0.049(B),在耐奎斯特频率fc处极差分别为0.035(R),0.057(G)和0.079(B).相比R,G基色MTF测量对比结果,B基色MTF测量比对结果在耐奎斯特频率fc处偏差较大,其主要原因为B基色刀口靶图像对比度不高,刃函数微分运算引入的放大噪声对测量结果影响较明显.在被测采用旋转刀口法与条纹板法得到的彩色相机MTF测量结果在空间频率fc/2处极差为0.043,在耐奎斯特频率fc处极差为0.061.

图12 (网刊彩色)彩色相机MTF测量结果 在空间频率(30—55 lp/mm)范围内,被测彩色相机R,G,B基色MTF与加权合成的彩色MTF极差分别为 0.019(R),0.01(G)和0.017(B)Fig.12.(color online)The differences between MTF results of R,G,B channels and the color camera MTF result over a range of spatial frequencies(30–55 lp/mm)are 0.019(R),0.01(G)and 0.017(B).

表1 旋转刀口法与条纹板法比对结果Table 1.Comparison results.
6 结 论
本文提出了一种采用旋转刀口靶测量彩色相机MTF的方法和计算算法,实现了对Bayer滤波型彩色相机MTF全频段上采样测量,同时可得到R,G,B三基色响应的全频段MTF曲线,从而为彩色相机成像性能综合评价提供了一种新的技术途径.本文在理论方面建立了基于旋转刀口靶测量Bayer滤波型彩色相机MTF的理论模型,分析了刃函数采样率和刀口靶刃边倾斜角度误差对所提方法测量精度的影响.当刃函数采样率m取值为4,5和6时,不同信噪比下的MTF计算结果之间偏差小于0.03.为了平衡刃函数采样率和噪声对相机MTF测量结果的影响,刃函数采样率建议值为4.通过旋转刀口靶和计算MTF曲线包围能量来逼近刀口刃边最佳倾斜角度,从而降低了刀口靶刃边倾斜角度误差引入的刃函数非均匀采样对测量结果的影响.为了验证所提方法的有效性,实验上搭建了基于旋转刀口靶和条纹板的彩色相机MTF测量装置,并对两种方法测量结果进行了比对.旋转刀口法与条纹板法测量彩色相机MTF结果在耐奎斯特频率fc处极差为0.061,在空间频率fc/2处极差为0.043.实验结果表明,本文所提方法可实现对彩色相机MTF全频段上采样测量,克服了传统调制传递函数测量方法的缺点.本文研究成果对彩色相机彩色插值算法优化和硬件性能提升提供了一种客观全面的评价手段.同时,此方法对红外热像仪、条纹相机、X射线探测器调制传递函数测量具有重要参考意义.
[1]Bryce E B 1975US Patent3917065[1975-11-04]
[2]Stephen K P,Robert S,Mary A K 1984Appl.Opt.232572
[3]John C F,Mohammad A K 1990Appl.Opt.29717
[4]Huang J,Liang R S,Si T D,Zhang K M,Tang Z L 1998Acta Phys.Sin.471289(in Chinese)[黄菁,梁瑞生,司徒达,张坤明,唐志列1998物理学报471289]
[5]Qi X J,Lin B,Cao X Q,Chen Y Q 2008Acta Phys.Sin.572854(in Chinese)[戚巽骏,林斌,曹向群,陈钰清2008物理学报572854]
[6]Xie X F,Wang H Y,Zhang W 2015Opt.Commun.354202
[7]Morishita J,Doi K,Bollen R,Bunch P C,Hoeschen D,Sirand R C,Sukenobu Y 1995Med.Phys.22193
[8]Zhou Z X,Gao F,Zhao H J,Zhang L X,Ren L Q,Li Z,Muhammad U G,Liu H 2014Opt.Express2222446
[9]Fang Y C,Tsay H L,Huang G Y 2014Appl.Opt.53 H195
[10]David Jr N S,James S G,Regina K F 1995Appl.Opt.34746
[11]Cunningham I A,Fenster A 1987Med.Phys.14533
[12]Tatsuya Y,Makoto N,Shinsuke H,Hitoshi I 2004SPIE5368696
[13]Hwang H,Choi Y W,Kwak S,Kim M,Park W 2008Proc.SPIE7109710905
[14]Francoise V R,Dominque L 2010Opt.Express183531[15]Kenichiro M,Takayuki Y,Yukihiro N,Masayuki S 2014Opt.Express226040
[16]Boone J M,Seibert J A 1994Med.Phys.211541
[17]Dobbins J T,Ergun D L,Rutz L,Hinshaw D A,Blume H,Clark D C 1995Med.Phys.221581
[18]Je ff rey T O,Richard L E,Eddie L J 2007Opt.Engng.4616403
[19]Stephen K P,Zia-ur R 1999Opt.Engng.38786
[20]Greer P B,Doorn T V 2000Med.Phys.272048
[21]Joseph W G(translated by Qin K C,Liu P S,Chen J B,Cao Q Z)2011Introduction to Fourier Optics(3rd Ed.)(Beijing:Publishing House of Electronics Industry)pp91–122(in Chinese)[顾德门 著 (秦可诚,刘培森,陈家璧,曹其智译)2011傅里叶光学导论(第三版)(北京:电子工业出版社)第91—122页]
[22]ISO Standard 122332000Photography-Electronic Still Picture Cameras Resolution Measurements
[23]Lomb N R 1976Astrophys.Space Sci.39447
[24]Albert M,Bedideck D J,Bakic P R,Maidment A D 1987Med.Phys.14533
[25]Rajeevramanat H,Wesleye S,GrifflB 2002J.Electron.Imaging11306
[26]Cok D R 1987US Patent4642678[1987-02-10]
[27]Laroche C A 1994US Patent5373322[1994-12-13]
[28]Hibbard R H 1995US Patent5382976[1995-01-17]
[29]Hamilton J F,Adams J E 1997US Patent5629734[1997-05-13]
