模糊PID在伺服系统中的设计和仿真
2018-01-15王培
王培
摘要:伺服系统在各方面都有重要的应用,其中伺服系统也是非常重要的应用。然而随着人们生活水平的提高和科学技术的发展,人们对伺服系统的要求越来越高,它指的是伺服系统的控制性能和控制精度。目前传统的PID控制方法已不能达到理想的要求。所以本文主要研究模糊PID控制技术对控制系统的控制效果,论文以伺服系统的位置回路为主要研究对象,来说明位置控制回路如何让伺服系统达到更高的精度,利用MATLAB的simulink软件来仿真伺服系统的控制模型,通过得到的仿真图像做前后对比分析,说明参数自整定模糊PID具有更好的暂态响应性能和稳态性能,以及对斜坡输入和阶跃输入都具有很好的响应特性,达到对伺服系统最优的控制。
关键词:伺服系统;PID控制;模糊PID;MATLAB仿真
一、模糊PID控制器的设计
各回路都采用不同的校正方法,各系统的特性也都可以因为传递函数的不同,系统的功能及特性不同。现选取单脉冲跟踪回路进行控制对比,其他回路的仿真方法类似,将校正网络改为PID控制化简后的原理图。对此位置回路进行仿真时使用以下规则整定:
(1)参数自整定规则
自整定PID控制器是以被控对象的输出值与目标值的误差e和误差变化率ec作为系统的输入,并用模糊推理的方法对PID的参数KP,KI,KD进行参数的整定,从而达到不同时刻的e和ec对PID参数整定的要求,达到期望的输出值。利用模糊规则库在线对PID参数进行修改和整定,便构成了自整定模糊PID控制器。
PID参数自整定的方法是找出PID控制器的三个参数KP,KI,lD,分别与e和ec之间的模糊关系,在系统的仿真中通过不断地检测e和ec的反馈值,根据模糊控制原理对3个参数进行在线修改调整,以满足不同的e和ec值对控制参数的不同要求,使系统具有良好的动态性能和静态性能。根据参数KP,KI和KD,和对系统输出特性的影响,可得出在不同的e和ec时,参数的自整定原则:
(a)当lel较小时,为使系统具有较好的稳定性能,KP与KI的取值都应大些,同时为了防止系统在期望值附近出现振荡,Kd值应根据|ec|的值确定,|ec|的值较大时,Kd取较小值,其他一般Kd值选中等大小。
(b)当lel的值中等大小时,为使系统响应具有较小的超调量,则KP应取较小值。此时系统,Kd的取值对系统响应的影响较明显,Kd值的选取也要适中,Kd过大会使系统提前制动,从而延长调节时间。KI的取值要适当一些。
(c)当lel较大时,为使系统具有良好的跟踪响应性能,应取较大的KP与较小的KD,同时为了防止系统响应出现较大的超调量,故应消除稳态误差,可以取KI值为零。
根据伺服系统位置回路控制精度的要求,选取角度误差|e|的基本论域为[0,1],选取角度误差变化率的lecl的基本论域为[0,10],模糊变量的基本论域都为{0,1,2,3,4,5,6}。
(2)语言变量隶属度函数的确定
设计的模糊PID控制器是两输入三输出的控制形式,以误差e和误差变化率ec为输入的语言变量;KP,KI和KD为输出语言变量。输入语言变量的语言值都取为“负大(NB)”,“负中(NM)”,“负小(NS)”,“零(ZO)”,“正小(Ps)”,“正中㈣Ⅵ)”,“正大(PB)”7种。输出语言变量的语言值均取为“零(ZO)”、“正小(PS)”、“正中(PM)”、“正大(PB)”4種[9]。两个输入量的隶属函数都选取三角形隶属函数。
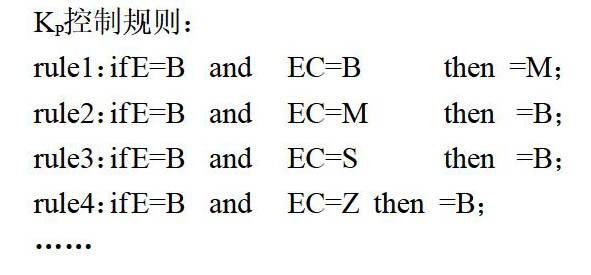
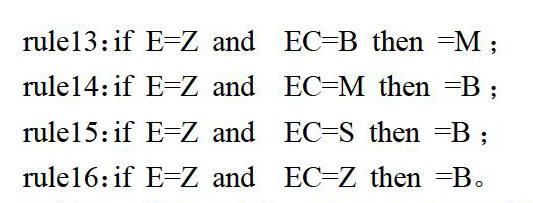
三个输出量的基本论域应用经验试凑法确定,KP的基本论域[0,0.1];Kl的基本论域[0,0.05];KD的基本论域[0,0.1]。输出隶属函数图象与输入隶属函数的图像时相似的,只是有不同的论域范围。当把每个规则表都写成条件语句分别各有16条语句,共有48条:
同样KIKD的规则表也可表达成语言规则的形式,每一个参数有16条规则,所以共有48条规则,因此进行模糊推理与模糊运算,每一次推理需要12条规则,计算后转到各自的论域范围就得到Kp,Ki,Kd的精确值。
总结以上模糊控制器设计的主要步骤:
(1)选定模糊控制器的输入输出变量,一般取e、ec和u,本文u是指输出Kp,Ki,Kd的值。
(2)确定各变量的模糊语言取值及相应的隶属函数,即进行模糊化。模糊语言值通常选7个,例如取为{负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)}然后对所选取的模糊集定义其隶属函数。
(3)建立模糊控制规则或控制算法,确定模糊推理和解模糊化方法。
(4)解模糊,得到Kp,Ki,Kd的调整值。
二、基于MATLAB的仿真分析
1、系统模型的仿真
设计模型控制系统的SIMULINK模型图,与前面的构建仿真模型图方法类似,在Simulink中依据模糊系统的“原理图”,按下述步骤设计“仿真模型图”。
第一步:设计模糊控制器的FIS结构文件;
第二步:设计模糊控制系统的仿真模型图;
第三步:对系统进行仿真。
2、编辑设计模糊控制器
编辑名称为“wm”的位置回路模糊控制系统FIS。
(1)在matlab主窗口中键入血zzy得出FIS编辑器界面。
(2)编辑“wm”的模糊控制规则。在编辑器界面上,顺序单机菜单“edit”→“Rules”弹出“wm”的Rules编辑器。
3、仿真结果
参数自整定模糊PID伺服系统阶跃响应跟踪位置回路仿真模型按下列步骤进行仿真:
(1)调整信号源的有关参数:为阶跃输入:
(2)调出显示器的显示屏:双击Scope模块;
(3)开始仿真:顺序单击菜单“simulation”—“star”。
模糊PID控制系统上升时间更短,超调量更小。而且模糊PID控制具有更好的响应性能,过渡过程很短,很快就能达到稳定。
三、结束语
所以由以上系统的仿真,可知应用模糊PID技术控制位置回路,进行参数的在线整定,能使系统达到了理想的精度。当然为了更全面的检验系统的稳态误差,可以对于有一定速度的输入信号,进行仿真和调试,检查速度信号对系统的影响,调整合适的参数,达到理想的响应特性。笔者会在以后的学习中完善更多的知识,深入学习和研究。