运用融合纹理和机载LiDAR特征模型估测森林地上生物量1)
2018-01-15胡凯龙刘清旺李世明庞勇李梅
胡凯龙 刘清旺 李世明 庞勇 李梅
(中国矿业大学(北京),北京,100083) (中国林业科学研究院资源信息研究所) (中国林业科学研究院荒漠化研究所)
森林地上生物量作为森林结构参数的重要组成部分,可以间接反映森林的固碳能力。准确估测区域尺度的森林地上生物量,是研究地球陆地生态循环,探测森林环境变化的重要手段[1-2]。光学遥感影像作为起步较早的遥感技术,被广泛应用于区域性森林的生理与结构特征的研究。根据不同的光谱波段信息计算的植被指数可以表示植被的分布。因此,在反演森林地上生物量时,植被指数比单一的波段信息更加稳定[3-4]。但是,在森林郁闭度以及蓄积量较高的地区,冠层的层叠以及物种分布的多样性会导致遥感信息的饱和,从而使得用植被指数估测的地上生物量值普遍偏低[5]。纹理特征作为一种遥感影像增强的表达方式,经常被应用于特征地物的识别[6]。Kuplich et al.[7]认为对于相同的地物类型,纹理特征所表征的不同相邻像素空间色调的空间差异性,可以直观地体现出相同森林类型,森林生物量分布的差异性,从而可以潜在地提高森林地上生物量较高区域的估测精度。但是,纹理属于相对复杂图像特征属性,受目标物地理条件复杂程度以及运算窗口大小的影响较为明显[8]。另外,过往的研究中很难指示出哪些纹理或纹理组合可以最大限度地反映森林生物量的分布状况。因此,单一地利用纹理特征估测森林地上生物量存在诸多不确定性。
激光雷达(LiDAR)作为一种主动式遥感系统,所发出激光脉冲能够穿透森林冠层到达地表,从而获取植被的三维结构特征[9-11]。小光斑机载LiDAR系统的激光束覆盖地面区域的直径小于50 cm,光斑点密度可达0.5~10点/m2,所得到的森林冠层点云受地形起伏影响较小。由机载LiDAR点云派生的点云特征变量(例如,高度分位变量、密度分位变量以及能量分位变量等)能够定量的描述森林植被的冠层分布特征[12-13]。通过建立这些特征变量与森林地上生物量的空间模型,可以估测区域性的森林地上生物量分布。对比已有的研究,机载LiDAR估测森林地上生物量的精度要优于星载光学传感器[14-15]、机载高光谱传感器[16]和机载SAR传感器[17]。另外,对于高蓄积量森林区域,机载LiDAR不会出现遥感信息饱和的问题,特别是大于1 300 t/hm2的森林区域,机载LiDAR有着更高的估测精度。
LiDAR变量的简单的统计回归模型,虽然对森林地上生物量估测有较好的精度,但是随着研究区的不同,模型需要在大量假设的基础上,考虑不同的影响因素。Zhao et al.[18]研究发现,尺度问题经常会影响回归模型的整个建模过程,样地大小的变化会直接影响森林地上生物量估测精度。支持向量机(SVM)作为一种基于监督统计的机器学习技术,已经被成功应用于土地覆盖和森林类型分类的研究。作为SVM的另一种应用形式,支持向量回归(SVR)在森林参数估测中应用较少,但是仍然有一些研究值得参考。Gleason et al.[19]使用不同的机器学习方法(SVM、随机森林、线性混合效应回归以及Cubist®)对中等郁闭度的森林生物量进行了估测,结果显示:在样地尺度下,每380 m2的森林覆盖,用SVR估测森林生物量的均方根误差(RMSE)为671 kg,精度优于其他机器学习的方法。Durbha et al.[20]利用多角度卫星遥感数据MISR的近红外和红光波段估测植被叶面积指数(LAI),SVR模型估测的叶面积指数RMSE为0.64。本文利用光学影像纹理特征,机载LiDAR特征,结合SVR建模方法,对研究区森林地上生物量进行估测。
1 研究区概况
研究区域位于内蒙古自治区根河市境内的大兴安岭森林生态系统国家野外科学观测研究站,是我国纬度最高的森林生态系统野外科学观测站。地理坐标为东经121°27′~121°37′,北纬50°54′~51°9′,区域总面积为1.1×104hm2。其隶属于我国东北部大兴安岭山脉,地貌类型以山地为主,多坡地分布,地形条件复杂多变,平均海拔963 m,年平均气温-2.6 ℃,年降水量428~526 mm[21]。森林植被呈明显地带性分布,从北部针叶林带,落叶阔叶林带到森林草原带和草原带。植被类型针叶林以兴安落叶松(Larixgmelinii)为主,伴有杜香(Ledunpalustre)落叶松林和杜鹃(Rhododendrondauricum)落叶松林,阔叶树种以白桦(Betulaplatyphylla)为主,伴生树种为山杨(Populusdavidiana)。
2 研究方法
2.1 样地数据
研究于2016年8月在覆盖机载LiDAR飞行区域范围里实地调查68块样地,其中针叶林样地37块,混交林样地31块。对样地所有树木进行每木调查,起测胸径为5 cm,每株被测木测量胸径、树高和冠幅等测树因子,同时记录相应的林分特征(草本覆盖度、灌木覆盖度和郁闭度等)。胸径测量使用胸径围尺,树高使用激光测高仪进行测量。手持差分GNSS接收机用于精确定位样地中心点地理坐标,差分所用基准站数据与机载LiDAR相同,从而保证数据处理的一致性。通过后差分处理得到,林下水平定位精度为1~2 m,高程定位精度为1~3 m。
为了得到样地尺度内森林地上生物量,需要对单株木的生物量进行计算。本研究使用二元幂函数和对数异速生长模型。其方程如下:W=a(D2H)b;lg(W)=a+blg(D2H)。其中,W为待计算的树木各组分生物量,D为所求树木的胸径,H为树高,a和b为方程系数。森林地上部分的生物量通过树木的干、皮、枝和叶生物量加和得到,不同树种的模型参数见表1。由于样地大小和遥感影像的像元分辨率不一致,本文利用样地面积把样地地上生物量转化为单位面积下的森林地上生物量。

表1 不同树种生物量模型系数表
2.2 光学遥感数据及预处理
光学遥感影像的光谱信息是反映描述植被生长及地表覆盖的重要特征。从美国地质勘探局网站下载一景与研究区位置相对应的Landsat 8 OLI数据,数据行列号为122/25。影像成像时间为2016年8月1日,处于研究区植被生长季并且与机载LiDAR飞行时间相匹配[25]。利用ENVI 5.1对影像进行预处理,通过辐射定标将原始影像DN值转化为辐射亮度值;利用FLAASH模型对影像进行大气校正,将辐射亮度值转化为地表反射率;选取30个地表控制点对影像进行几何精校正,以减小图形畸变误差;为了对研究区进行分森林类型建模,利用地物特征点对影像进行监督分类,主要分为针叶林、阔叶林、混交林和非森林4类。
2.3 LiDAR数据及预处理
机载LiDAR点云高密度属性,可以反映森林的三维结构信息,从而可以弥补光学影像表征单一平面信息的不足。本研究于2016年8月在试验区进行了机载LiDAR飞行实验,用RIGEL公司的LMS-Q680i激光扫描系统获取了177 km2的机载激光雷达全波形数据,激光器的工作波长为1 550 nm,激光束离散角为0.5 mrad,脉冲宽度3.5 ns,扫描角±30°。设计15条平行航线且飞行高度为1 900 m,通过高斯分解获得离散点云信息,平均点云密度为8.9点/m2。利用Terrasolid软件对原始点云进行分类,得到噪声点、地面点和植被点。利用地面点进行不规则三角网(TIN)空间插值得到研究区的DEM(数字高程模型)。利用DEM对植被点的绝对高程进行高度归一化处理,从而消除地形影响。
2.4 总体技术流程
1)应用树木异速生长模型计算样地内森林地上生物量,并与样地坐标进行匹配,生成相应样地森林地上生物量矢量点文件。
2)对机载激光雷达点云进行地形归一化,得到消除地形信息的点云相对高度并提取相应LiDAR点云特征;对Landsat 8数据进行预处理,提取红、绿、蓝和近红外4个波段在不同运算窗口下的5种纹理特征。
3)利用样地生物量矢量文件匹配遥感特征因子,得到样本数据。随机选取60%样本数据作为训练样本分别对点云和纹理特征进行单一因子建模并分析模型精度。
4)选择精度较高的建模因子对研究区进行区分森林类型的多因子SVR建模,并对整个研究区进行森林地上生物量估测,利用剩余40%样本进行精度验证以及不确定性分析。技术路线如图1所示。

图1 研究路线图
2.5 遥感影像纹理特征提取
根据分析不同相邻像素之间差异性方法的不同,纹理特征提取算法也会存在一定差异。灰度共生矩阵(GLCM)是目前最为常见的纹理统计分析方法,被广泛应用于光学影像的森林参数估测。从原理上讲,共生矩阵是用不同位置上像素的联合概率密度所定义,主要包括一阶概率统计和二阶概率统计,它不仅可以描述影像亮度的分布规律,也可以反映相同灰度像素之间的位置分布特征[26]。对于给定像元在图像(x,y)中的灰度值i,统计与距离为δ、灰度为j的像素(x+Δx,y+Δy)同时出现的概率P(i,j,δ,θ),数学表达式如下:
P(i,j,δ,θ)={[(x,y),(x+Δx,y+Δy)]|f(x,y)=
i,f(x+Δx,y+Δy)=j;x=0,1,…,Nx-1;
y=0,1,…,Ny-1}。
其中:i,j=0,1,…L-1;x、y分别是图像中的像素的横纵坐标值;L为图像的灰度级数;Nx、Ny分别为图像的行列数。与光谱特征提取不同,纹理特征涉及到像元邻域信息,本文通过设置运算窗口为3×3、5×5和7×7,对影像的纹理特征进行提取(见表2)。
2.6 机载激光雷达点云变量提取
机载卫星定位系统所记录点云高度为基于地球椭球面的大地高度,这种绝对高度与森林地上生物量没有直接关系。点云高度归一化是通过对点云的绝对高度减去对应点的DEM高程,得到地物点相对于地面的高度,从而消除地形的影响。首先,对分类后的地面点建立不规则三角网TIN,构建地表高程模型。然后,计算所有植被点到TIN表面的垂直高度,得到归一化后的相对高度。由于点云分类算法的误差,使得一些植被点可能会低于TIN表面,导致点云归一化后的高度小于零,这些小于零的值在参数提取时没有实际意义,需要把这些点的高度值归为零,具体公式如下:
其中:Hc表示为归一化后点云相对高度,h表示为点云绝对高程,hTIN表示地面点不规则三角网绝对高程。
由归一化点云提取的高度分位数变量可以定量的描述植被冠层的高度分布(见图2),其统计学定义为:对于总体X和给定的α(0<α<1),如果存在xα使得P{X≥xα}=α,则xα即为总体X的α分位数。
过大或过小的计算窗口都会使统计信息失去意义,根据不同尺度以及点云密度,计算窗口一般选择为20~50 m。为了与Landsat 8影像分辨率匹配,选择30 m×30 m的计算窗口进行H5、H10、H25、H50、H75、H90、H95和H99共8个点云高度分位数的提取。除了点云的高度变量,还对点云高度的进行了统计,并提取了最大值(Hmax)、平均值(Hmean)、标准差(Hstd)、植被回波与总回波比(Cov)和植被回波与地面回波比(Den)。
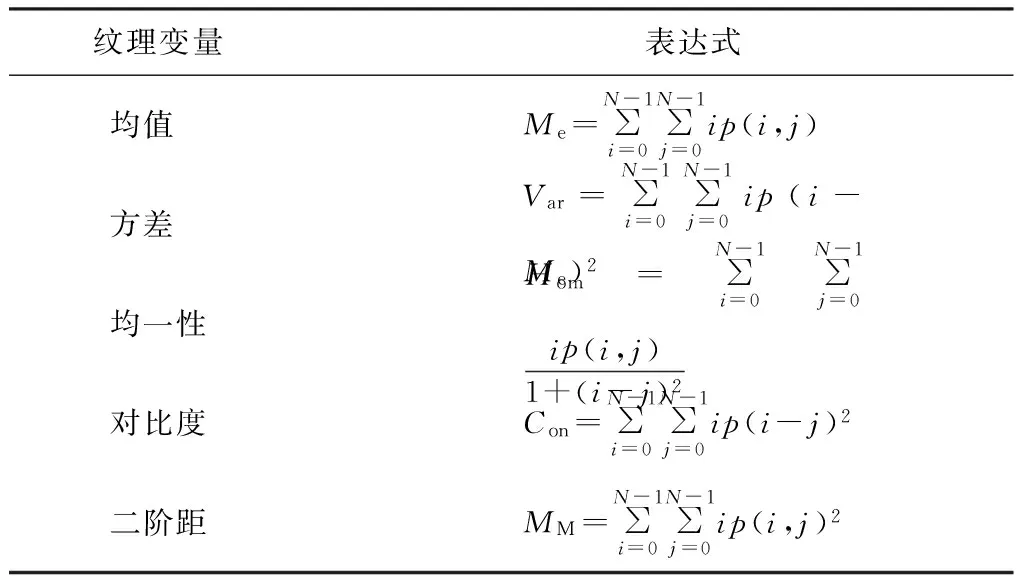
表2 提取纹理特征列表

图2 点云冠层高度模拟
3 结果与分析
3.1 纹理特征建模
由表3可知,由于绿色植被对不同波段的波谱响应不同,模型的精度差异较大。绿光波段主要应用于区分森林类型或树种,对健康茂盛植被的光谱反射能力较为敏感,对植被生化参数的差异性反映并不明显,因此,对森林地上生物量建模精度较低,最高的建模精度出现在5×5窗口,R2=0.31,RMSE=35.54 t/hm2。蓝光、红光和近红外波段对植被的叶绿素差异性较为敏感,在不同窗口,都有建模精度较高的情况出现,最高建模精度(R2=0.73,RMSE=22.32 t/hm2)出现在蓝光波段7×7窗口处。同一波段不同窗口尺寸的建模精度差异较大,其中3×3窗口的建模精度最低(R2=0.09~0.17)。5×5和7×7建模精度相对较高,主要是因为较大的运算窗口使得像素间的树冠和阴影比例差异更大,对应的纹理特征对地物之间的差异性反映更为敏感,从而导致较大运算窗口建模精度相对较高。
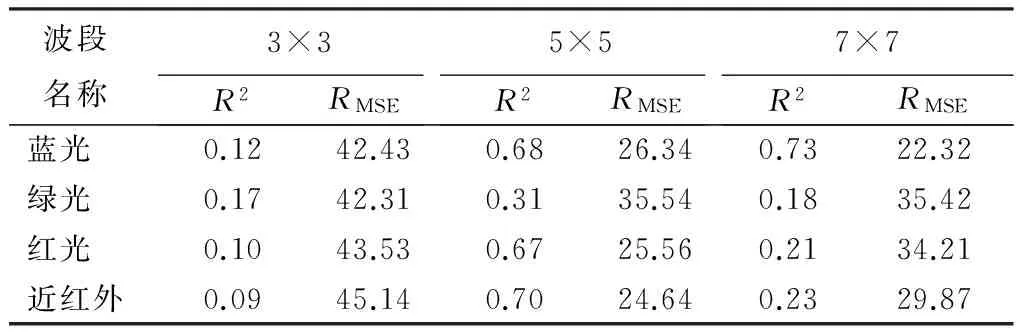
表3 不同波段和窗口大小的纹理特征建模结果
3.2 机载LiDAR点云特征建模
由图3可知,归一化后每棵树的点云分布处于同一高度参考下,树冠的点云分布剖面结构更加明显。有利于利用样地位置匹配点云,提取不同点云特征,并对每一个LiDAR点云变量进行SVR建模。

图3 机载LiDAR点云归一化结果对比
由表4可知,不同点云变量的的模型决定系数R2与RMSE变化趋势一致,R2变化范围为0.11~0.75,RMSE变化范围为19.24~48.12 t/hm2。其中,点云的统计变量中,Hmean建模精度相对较高R2=0.60;植被覆盖度变量(Cov)和植被点密度变量(Den)建模精度相对较低,R2分别为0.31和0.21;高度分位数变量的建模R2呈现正态分布趋势,建模精度最高出现在H50,R2=0.75,之后向两边逐渐减小。这主要由于树木冠层顶端分布面积较小,冠顶分布的激光点较少,使得高分位数不能充分描述树木的冠层顶部,从而导致建模精度相对较低;随着树叶枝干的逐渐向外延伸,激光点数逐渐增多,当达到最大冠幅所处的高度位置(约为H50所在高度)时,激光点数达到一个峰值,此时高度信息较为稳定,建模精度达到最高;随着冠幅的不断减小,由于遮挡等原因,激光点数呈现降低的趋势,建模精度也随之下降。
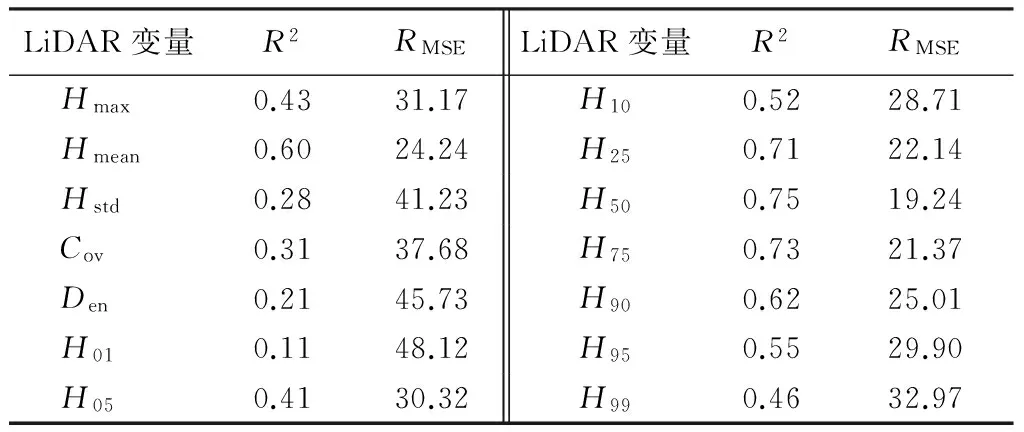
表4 LiDAR点云特征建模结果
3.3 融合点云和纹理特征的建模
SVR模型中,惩罚系数(C)以及核函数参数γ是主要的模型参数。当训练数据被映射到高维空间中,γ主要反映训练数据的可分离程度;过大的C值会导致过高的回归精度,从而出现过拟合现象;过小的C值会降低模型对训练样本的拟合能力,从而导致模型精度降低。因此,选择R2>0.5的变量进行森林地上生物量SVR建模。SVR建模结果如表5所示,C和γ值的浮动范围分别为64~1024和16~512,不同森林类型的模型最优参数值差异较大,如果针对不同森林类型使用相同的模型参数值,会导致模型精度降低,从而失去参数优化的意义。对于不区分森林类型的情况,建模R2=0.76,相对于只考虑单一的点云特征H50(R2=0.75)提高了0.01。对于区分森林类型,建模R2和RMSE相对于不区分森林类型的模型有了一定程度提高,具体表现为针叶林优于混交林,主要由于混交林的树种和成份较为复杂,林分异质性较大,因而纹理信息和激光雷达回波信息的变化也较大,从而导致模型拟合程度较低。

表5 不同森林类型的融合特征建模结果
分别利用不同森林类型SVR模型,对整个研究区进行森林地上生物量估测,由于缺少阔叶林建模样本,阔叶林区域用混交林模型进行预测。利用剩余40%独立验证样本,对估测结果进行预测能力分析。
由图4可知,针叶林和混交林的验证R2分别为0.80和0.75,相比于建模R2分别降低了0.01和0.03,降低程度并不明显;体现在RMSE上,预测的RMSE分别为19.63和20.40 t/hm2,相比于建模的RMSE,针叶林提高了2.31 t/hm2,混交林提高了1.11 t/hm2,没有出现过大的降低或升高,说明模型的泛化能力较好,没有出现过拟合的现象。

图4 生物量估测结果验证
4 结论与讨论
以大兴安岭生态观测站为研究区,综合利用光学影像纹理特征和机载激光雷达点云特征,采用SVR建模方法,对森林地上生物量进行了估测,得到结论如下:
(1)不同波段和窗口尺寸的纹理因子建模精度差异较大,绿光波段对森林地上生物量的差异性反映较弱,建模精度较低,R2=0.31;较大的运算窗口使得像素间的差异性被放大,从而使得建模精度较高,R2=0.73。纹理因子所体现出的林层结构和冠层阴影间的差异性,使得光学影像的纹理特征可以作为森林生物量估测的参考。
(2)机载激光雷达点云能够精细描述森林冠层结构特征,对于点云的统计变量,Hmean的建模R2相对较高为0.60;点云高度分位数变量的建模精度呈正态分布,H50处的点云高度信息较为稳定,建模的R2最高为0.75。
(3)不同森林类型的SVR模型最优参数值变化较大,说明SVR模型的内在参数在一定程度上影响着建模的精度;融合纹理特征和点云特征的建模精度相较于单一变量有了一定程度的提高,针叶林模型的精度优于混交林,且建模精度和预测精度呈现较好的一致性,模型的泛化能力较好。
由于区域性森林地上生物量估测不同于小范围森林地上生物量估测,影响其估测精度的不确定性误差因素较多,虽然本文综合利用光学影像纹理特征和机载激光雷达点云特征,对区域性的森林地上生物量进行了估测,但是仍有一些不确定的因素未考虑到。光学影像的纹理特征主要通过分析像元光谱信息特征,体现不同地物特征之间的差异性,Foody et al.[5]认为在低郁闭度或地形起伏较大的森林覆盖区域,较低分辨率的Landsat 8 OLI数据的光谱信息易受土壤的生理特性或地形高差影响,导致由单一的光谱波段产生的纹理信息不能准确描述真实的植被特征,从而使得森林地上生物量的估测误差产生10~15 t/hm2的不确定性。另外,同样受到地形起伏的影响,机载激光雷达点云的滤波算法会不可避免的产生错分误差,某些明显的植被点或建筑物点会归为地面点,从而导致由地面点产生的TIN三角网不能准确描述地形特征,进而使得归一化后的点云高度与实际地物高度产生偏差,这些偏差会直接影响点云变量的提取精度。庞勇等[12]用激光雷达点云数据对地形起伏相对较小的小兴安岭森林组分生物量进行了反演,反演结果R2均大于0.8,优于本文的估测结果。虽然这些误差来源会在一定程度上影响建模精度,但是本文的结果与Sarker et al.[27]和付甜等[28]的估测结果相比,精度有了相应的提高。因此,融合纹理和机载激光雷达点云特征的森林地上生物量估测思路可以为后续的研究提供相应的理论和实践支持。
[1] 张志,田昕,陈尔学,等.森林地上生物量估测方法研究综述[J].北京林业大学学报,2011,33(5):144-150.
[2] 王维芳,宋丽楠,隋欣.帽儿山林场森林生物量估测及时空动态格局分析[J].东北林业大学学报,2010,38(1):47-49.
[3] 张志东,臧润国.基于植被指数的海南岛霸王岭热带森林地上生物量空间分布模拟[J].植物生态学报,2009,33(5):833-841.
[4] 国庆喜,张锋.基于遥感信息估测森林的生物量[J].东北林业大学学报,2003,31(2):13-16.
[5] FOODY G M, BOYD D S, CUTLER M E J. Predictive relations of tropical forest biomass from Landsat TM data and their transferability between regions[J].Remote Sensing of Environment,2003,85(4):463-474.
[6] 李明诗,谭莹,潘洁,等.结合光谱、纹理及地形特征的森林生物量建模研究[J].遥感信息,2006(6):6-9.
[7] KUPLICH T. M, CURRAN P. J, ATKINSON P. M. Relating SAR image texture to the biomass of regenerating tropical forests[J]. International Journal of Remote Sensing,2005,26(21):4829-4854.
[8] CHAMPION I, DUBOIS‐FERNANDEZ P, GUYON D, et al. Radar image texture as a function of forest stand age[J]. International Journal of Remote Sensing,2008,29(6):1795-1800.
[9] 刘东起,范文义,李明泽.利用小光斑激光雷达估测林分参数和生物量[J].东北林业大学学报,2012,40(1):39-43.
[10] 尤号田,邢艳秋,王萌,等.小光斑激光雷达数据估测森林生物量研究进展[J].森林工程,2014,30(3):39-42.
[11] 曹林,佘光辉,代劲松,等.激光雷达技术估测森林生物量的研究现状及展望[J].南京林业大学学报(自然科学版),2013,37(3):163-169.
[12] 庞勇,李增元.基于机载激光雷达的小兴安岭温带森林组分生物量反演[J].植物生态学报,2012,36(10):1095-1105.
[13] TAKAGI K, YONE Y, TAKAHASHI H, et al. Forest biomass and volume estimation using airborne LiDAR in a cool-temperate forest of northern Hokkaido, Japan[J]. Ecological Informatics,2015,26(3):54-60.
[14] GONZALEZ P, ASNER G P, BATTLES J J, et al. Forest carbon densities and uncertainties from Lidar, QuickBird, and field measurements in California[J]. Remote Sensing of Environment,2010,114(7):1561-1575.
[15] LEFSKY M A, COHEN W B, HARDING D J, et al. Lidar remote sensing of above‐ground biomass in three biomes[J]. Global Ecology and Biogeography,2002,11(5):393-399.
[16] 申鑫,曹林,佘光辉.高光谱与高空间分辨率遥感数据的亚热带森林生物量反演[J].遥感学报,2016,20(6):1446-1460.
[17] NELSON R F, HYDE P, JOHNSON P, et al. Investigating RaDAR-LiDAR synergy in a North Carolina pine forest[J]. Remote Sensing of Environment,2007,110(1):98-108.
[18] ZHAO K, POPESCU S, NELSON R. Lidar remote sensing of forest biomass: A scale-invariant estimation approach using airborne lasers[J]. Remote Sensing of Environment,2009,113(1):182-196.
[19] GLEASON C J, IM J. Forest biomass estimation from airborne LiDAR data using machine learning approaches[J]. Remote Sensing of Environment,2012,125:80-91.
[20] DURBHA S S, KING R L, YOUNAN N H, et al. Support vector machines regression for retrieval of leaf area index from multiangle imaging spectroradiometer[J]. Remote Sensing of Environment,2007,107(1/2):348-361.
[21] 穆喜云,张秋良,刘清旺,等.基于机载LiDAR数据的林分平均高及郁闭度反演[J].东北林业大学学报,2015(9):84-89.
[22] 鲍春生,白艳,青梅,等.兴安落叶松天然林生物生产力及碳储量研究[J].内蒙古农业大学学报(自然科学版),2010,31(2):77-82.
[23] 韩铭哲,周晓峰.兴安落叶松-白桦林生态系统生物量和净初级生产量的研究[M].哈尔滨:东北林业大学出版社,1994.451-458.
[24] 罗云建,王效科等.中国主要林木生物量模型手册[M].北京,中国林业出版社,2015:170-171.
[25] 徐婷,曹林,申鑫,等.基于机载激光雷达与Landsat 8 OLI数据的亚热带森林生物量估算[J].植物生态学报,2015,39(4):309-321.
[26] 侯群群,王飞,严丽.基于灰度共生矩阵的彩色遥感图像纹理特征提取[J].国土资源遥感,2013,25(4):26-32.
[27] SARKER L R, NICHOL J E. Improved forest biomass estimates using ALOS AVNIR-2 texture indices[J]. Remote Sensing of Environment,2011,115(4):968-977.
[28] 付甜,庞勇,黄庆丰,等.亚热带森林参数的机载激光雷达估测[J].遥感学报,2011,15(5):1092-1104.
