飞机外仓清洁机器人的设计
2018-01-15杜玉杰田秀兵
杨 勇,杜玉杰,田秀兵
目前飞机表面的清洁工作仍主要采用人工式的清洁方法,或者采用大型清洁车进行喷洒清洗,存在装置体积庞大,使用、安装等相对比较复杂,实用性不强,造成了整体清洁的运动不灵活,危险系数高等缺点。将清洁机器人装置做得简单、运动灵巧,能适用于大部分飞机主翼、机身以及尾翼的清洁使用是关键。因此本文设计了一款以STM32单片机为核心控制器的飞机外仓清洁机器人来满足需要。
1 系统总体方案设计
1.1 系统组成
本设计方案以STM32单片机为核心控制器,通过负压吸附模块吸附在飞机表面;通过机械运动模块在飞机表面的运动;通信模块实现地面控制终端对机器人的控制,并将机身的清洁情况以及伤痕通过摄像头传给机务人员[1];超声波避障模块实现机器人行进过程中有效避障[2];清洁模块实现对飞机外仓表面的有效清洁。飞机外仓清洁机器人的系统框架如图1所示。
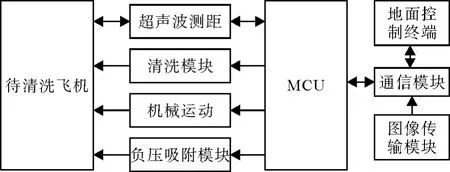
图1 系统组成框图
1.2 机械运动系统设计
机械结构的整体外部形态如仿生蜘蛛[3],由6只机械脚组成,6个吸盘分别固定在6只机械脚上,每只机械脚有3个自由度,每只脚可摆动的角度为60°。当机器人运动时左右两只脚同时进行相应的攀爬,一个循环运动可分为3次机械运动,机器人整个身体运动一次可实现运动距离L=3(20×1/2)×2=60 cm,因此移动距离较好。经计算一个真空泵产生的负压为147.6 kPa,而克服机器人重量使其稳定吸附在飞机外仓所需要的负压为12.76 kPa[4],所以可以稳定地吸附在飞机表面的垂直尾翼以及流线型的机身外仓上。在单片机控制下,真空泵的吸排气和舵机运动相互配合,使机器人吸附于流线型飞机外仓表面[5]并能在飞机外仓表面前后左右移动。机器人整体结构图如图2所示。用。通过单片机进行占空比的控制,12个舵机模块的中间信号端分别连接到单片机的12个I/O口进行信号控制,简单高效,相互干扰较小。使用舵机精确的角度转动带动轴的弯曲,使吸盘贴近飞机外仓表面,多个舵机配合驱动机体前进。采用此方式能够精确地实现吸附功能,并且能够使机体灵活方便地在飞行外仓表面进行清洗活动。
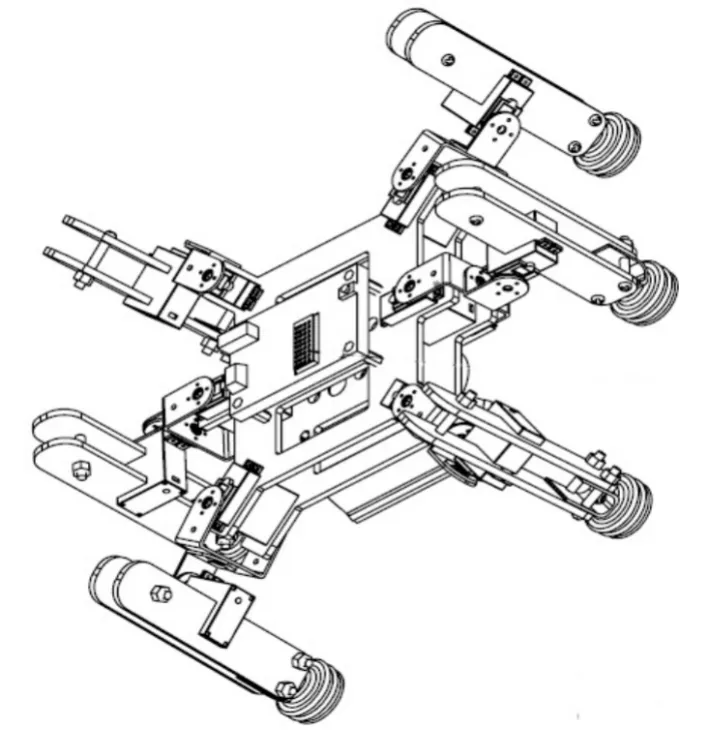
图2 机器人整体结构图
2 控制电路设计
机器人整体的运动部分采用多个舵机配合使
2.1 单片机控制模块
该系统由STM32F103ZET6作为主控芯片,该芯片具有处理速度快、存储空间大的特点,并且该芯片具有2个12位模数转换器,同时它支持的外设有定时器、ADC、SPI、USB、IIC和UART,有多达112个快速I/O端口、8个定时器、3个16位定时器,有9个通信接口、2个I2C接口和3个USART接口,有2个SPI接口 (18 Mb/s)、CAN接口、USB 2.0全速接口[6],完全能够满足系统设计需要。STM32外围电路如图3所示。
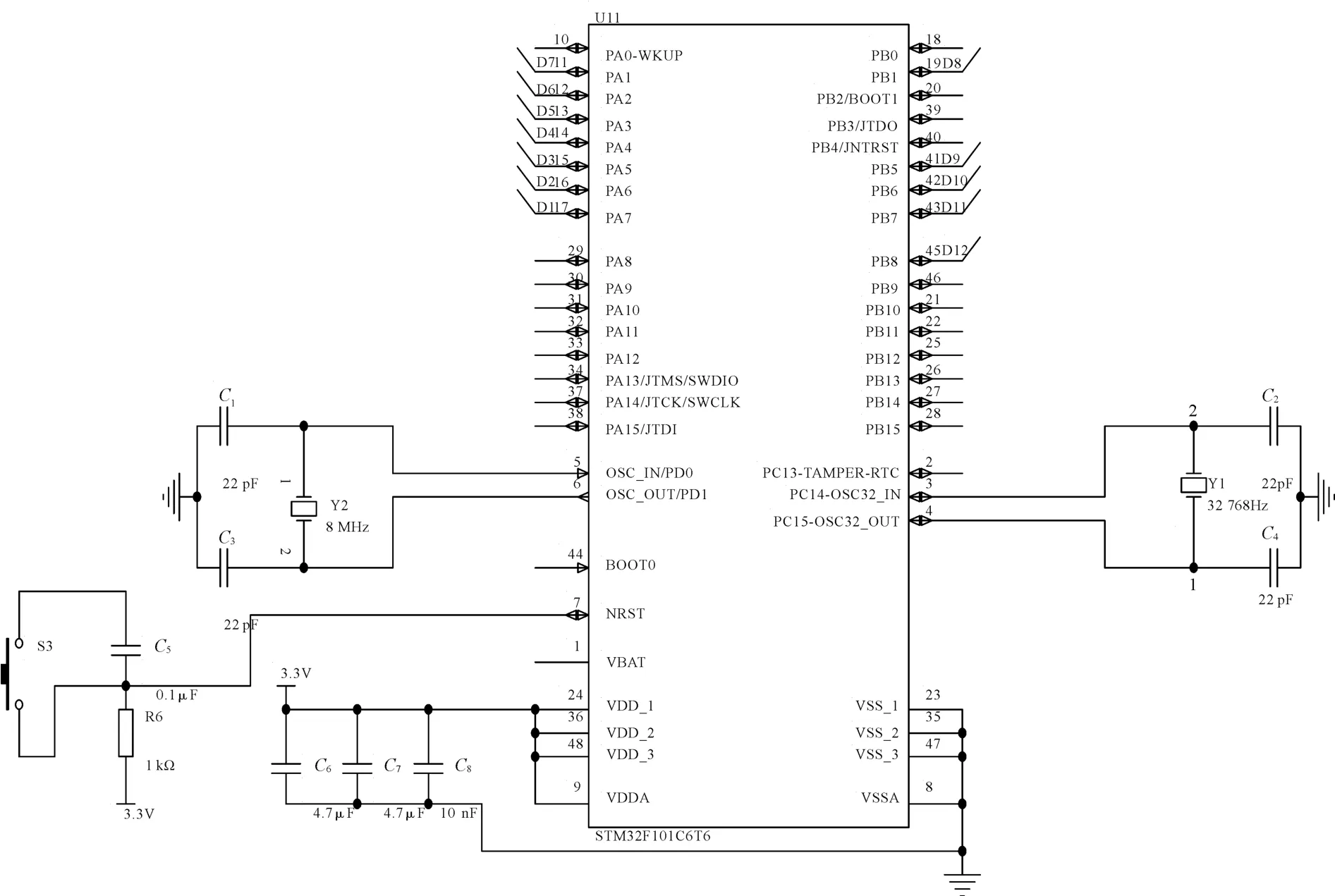
图3 STM32外围电路
2.2 电源供电模块
本系统需要5 V和3.3 V电源供电,由于市面上的锂电池没有合适的供电电压[7],需要采用电源稳压电路分压后输出,使用LM7805将电压稳定在5 V,用A1117芯片将5V电压稳压到3.3 V,分别给STM32单片机和WiFi模块供电,保证系统的正常工作[8]。电源供电模块电路图4所示。
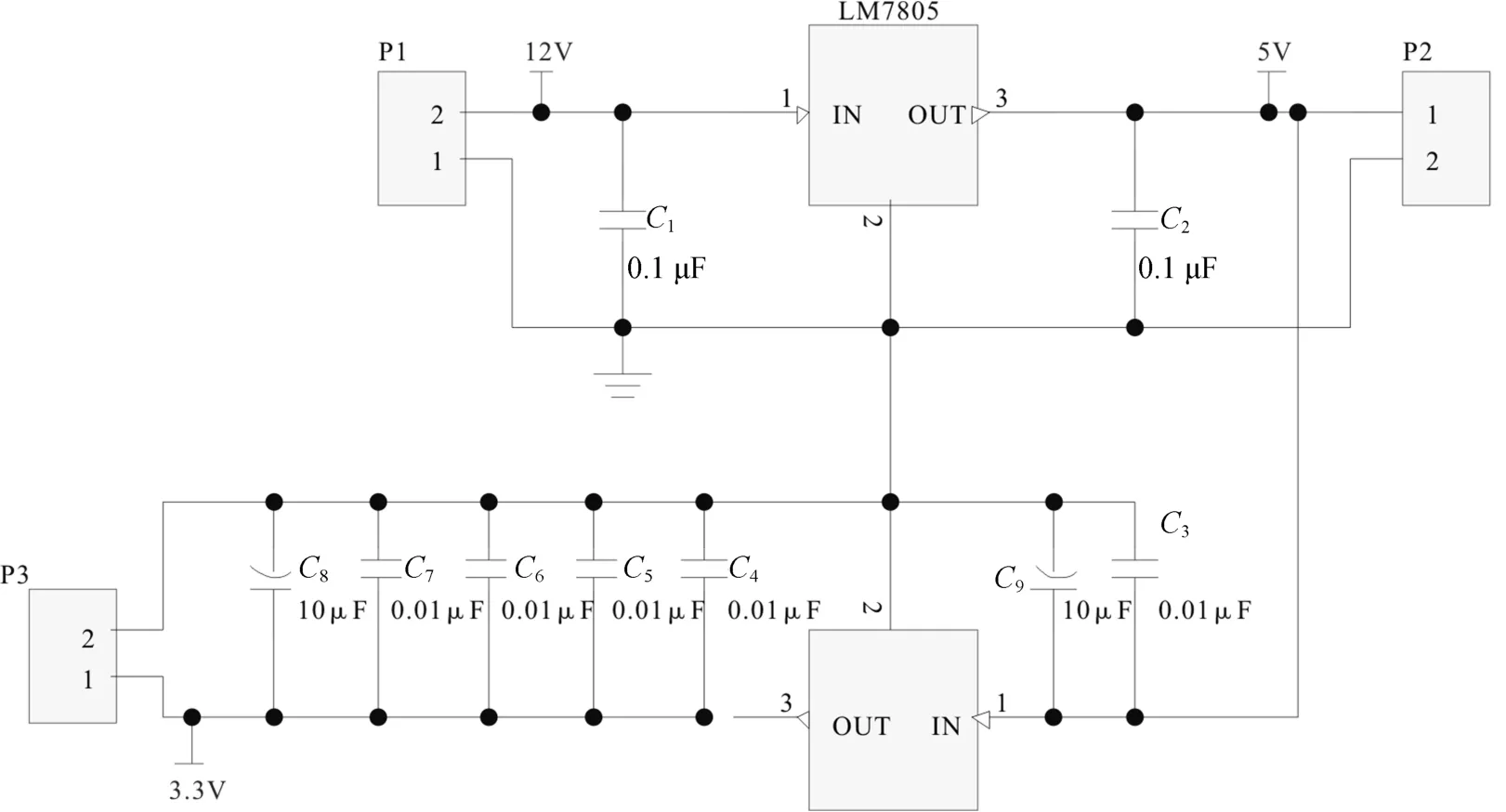
图4 电源供电模块
2.3 通信模块
通信模块内置无线网络IEEE802.11协议栈以及TCP/IP协议栈,能够实现用户串口或TTL电平数据到无线网络之间的转换,基于UART接口的WiFi嵌入式模块成本较低。通过RX、TX端口与单片机行串行通信[9],实现上位机连接WiFi热点,通过上位机控制清洁机器人实现相应的工作,同时摄像头也会通过图像传输模块将前方图像视频传输到上位机界面,实现多方位监控观察。通信模块传输速率可达到460 800 b/s,在空旷的地方可以传输300 m,在其他有障碍物的地方也可以传输100 m。WiFi模块电路图如图5。
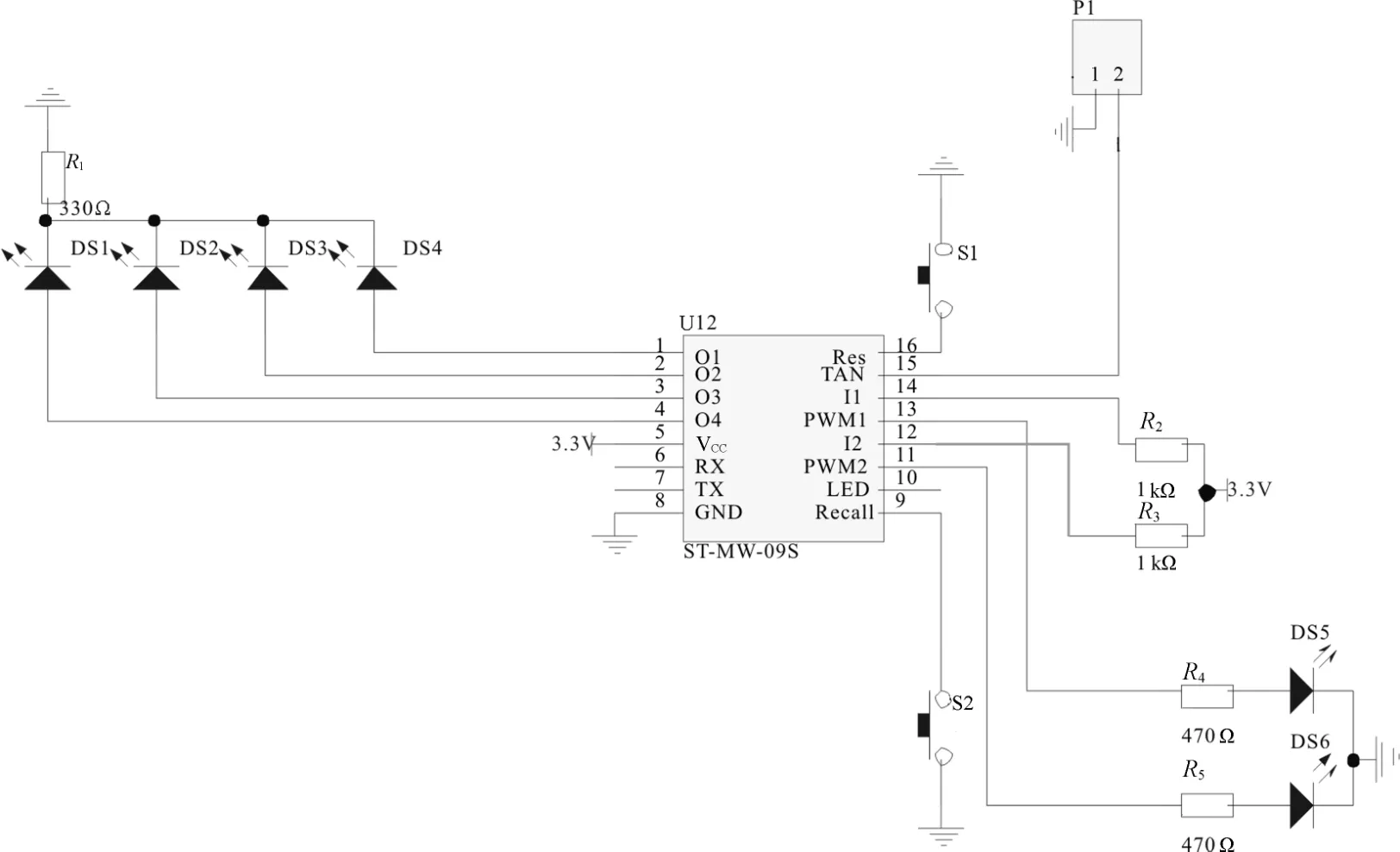
图5 WiFi模块
2.4 超声波避障模块
超声波避障模块[10]通过控制口发射一个10μs以上的高电平,在接收口等待高电平信号,当检测到信号时定时器进行计时,当接收口变为低电平时可读取定时器的值,通过转化就可获得此次测距的距离。如此循环进行周期检测,便可实现实时移动测量值,并将测量计算后的数值与基准数值35 cm进行校准。当大于基准值时,装置继续运行;当小于基准值时,装置会进行后退处理,并在上位机界面进行报警提示[11],以防止触碰到机身突起部位造成二次伤害。超声波避障流程图如图6所示,超声波避障电路如图7所示。
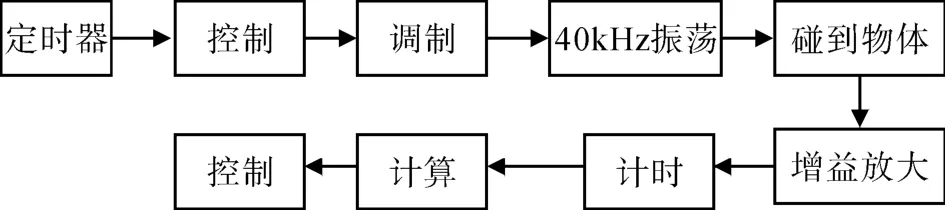
图6 超声波避障流程图
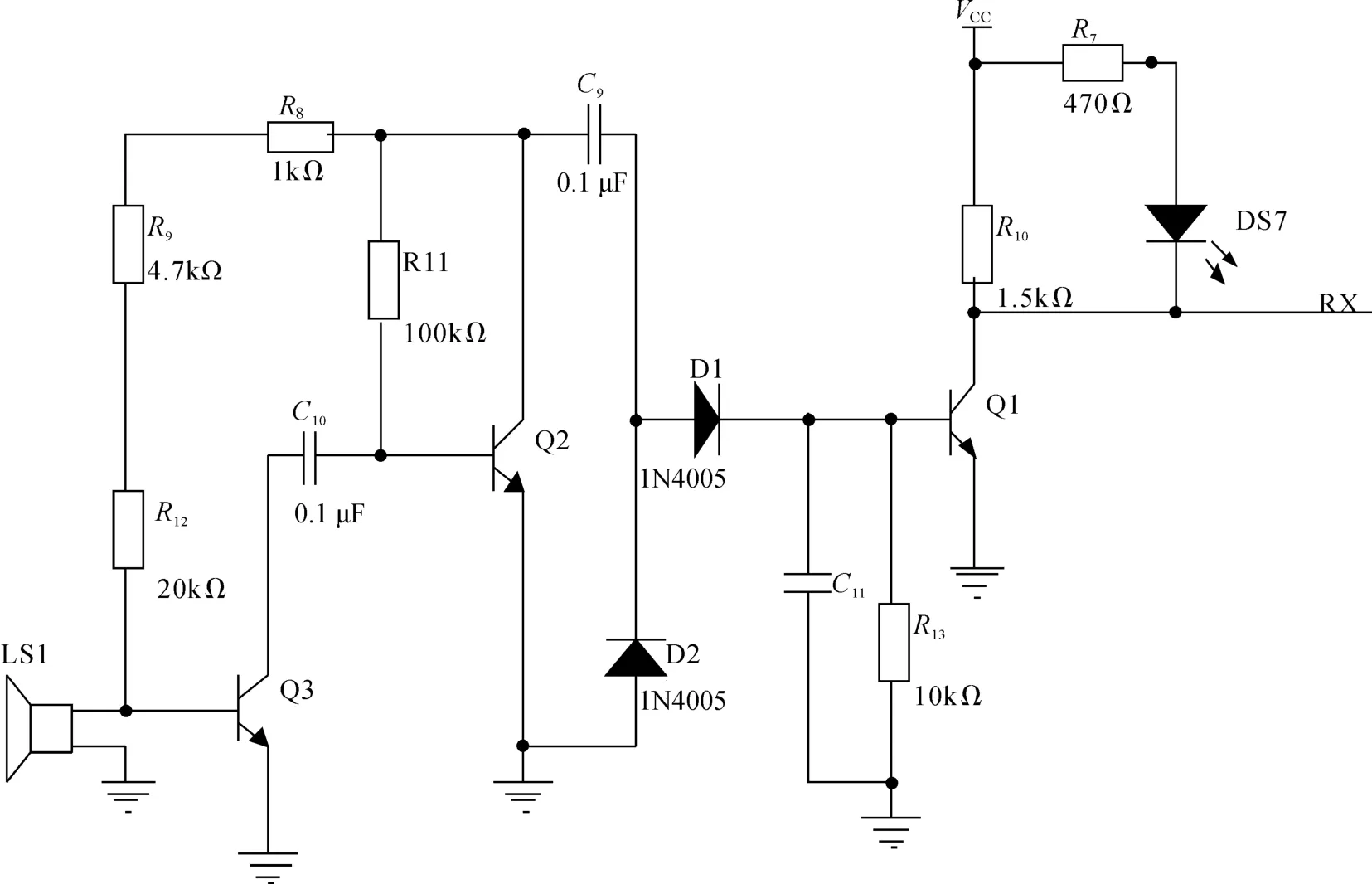
图7 超声波避障电路
2.5 图像传输模块
图像传输模块是由摄像头、接收端RC832、发射端TS832共3部分组成,接收端RC832、发射端TS832的工作频率为5.8 GHz,工作频率稳定、可靠,且图像传输更易实现,有效传输距离可达到1 000 m,图像信息可快速地传到终端上位机显示。图像传输模块如图8所示。
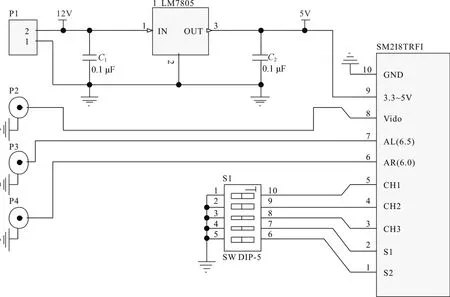
图8 图像传输模块
3 具体实施流程及软件设计
3.1 系统流程图
整体的流程控制非常简便,清洁机器人上端的无线接收模块会实时检测WiFi信号的接收,当检测到信号时,相应的控制信号便会传给STM32单片机,单片机进行信号处理,实现机翼清扫、机身表面吸附运动、清洁液喷洒、机身清洁度以及伤痕的检测等工作。
清洁机器设备主要通过STM32单片机进行控制,在真空泵的吸气排气作用下来控制吸盘的吸附,并且每只机械脚的3个自由度可自由移动,在飞机外仓、机翼上进行清洁;清洁模块在喷洒水装置的配合下转动清洗海绵模块可实现飞机表面的清洁,且附带的刮擦模块可将飞机表面的污渍进行更加有效的清洁工作,以达到理想的清洁效果。程序流程图如图9所示。
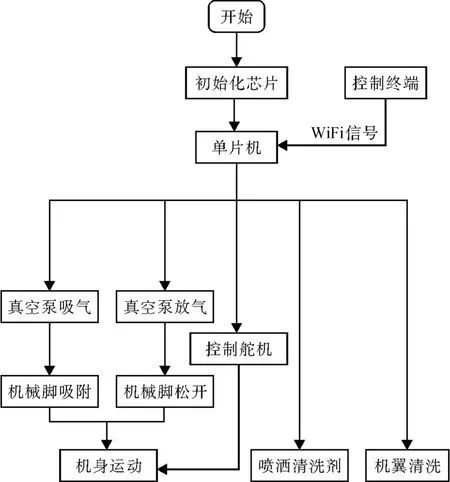
图9 程序流程图
3.2 上位机操纵界面设计
上位机界面通过C#语言进行软件编写[12],通过串口通信进行数据交换及实时监控,通过搭载在清洁装置上的摄像头传回来图像信息显示在终端上位机上,让机务维修人员以及清洁人员能清晰地看到飞机[13-14]机身上的污渍以及是否有其他伤痕,以便及时维护。上位机界面如图10所示。
4 整体系统的可靠性
4.1 机械模块的可靠性
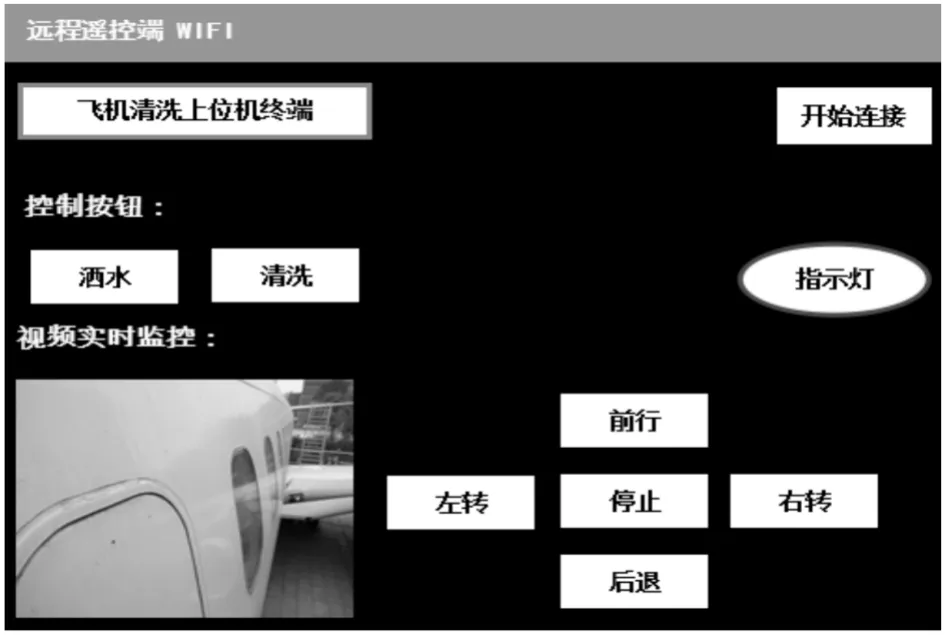
图10 上位机界面
每只脚可摆动的角度为60°,当机器人运动时左右两只脚同时进行相应的攀爬,一个循环运动可分为3次机械运动[15-16]。根据三角形定理,机器人整个身体运动一次可实现的运动距离为60 cm[17],运动效果明显,效率较高。真空泵负压可达到350 mmHg,在大气压的作用下一个真空泵经计算可达到的负压为 (760 mmHg+350 mmHg)×0.133 kPa/mmHg=147.6 kPa。
机器人整体质量为5 kg,在万有引力的作用下机器人机身重量约为5 kg×9.8 N/kg=49 N;吸盘面积 s=3.14(0.025 cm)2=1.96×10-3m2, 所以整体稳定的负压为 49 N/(1.96×10-3m2) ×2=12.5 kPa。
由于真空泵所达到的负压大于吸附在玻璃上所需要的负压,所以可以稳定地吸附在飞机外舱上,可靠性比较好。
4.2 电路模块的可靠性
电路的各个模块采用了防水的密封胶进行外壳的密封,以防在喷洒的过程中水和清洗剂的渗入造成电路板的腐蚀,防水性能好。
稳压电路设计稳定可靠,在稳压模块设计了较多的辅助散热片,可防止系统在长时间的运行过程中因为过热而导致稳压模块停止工作。
无线通信模块信息传输可靠稳定,无线传输图像模块工作频率为5.8 GHz,和市面上一般的2.4 GHz的频率相比受到的干扰较小,所以在传输过程中不会造成信号延误、多信号源混乱等问题,受外界干扰小,整体可靠性高。
5 结束语
本文设计了一款基于STM32单片机的飞机外仓清洁机器人,该机器人机械结构设计合理,硬件电路设计可靠,软件设计稳定,系统操作简便,能稳定地吸附于飞机外仓[18-19]表面,并能在飞机外仓表面及飞机机翼上运动,实现对飞机外仓表面的清洁或检测工作,具有一定的推广应用价值。
[1]蔡传武,管贻生.双手爪式仿生攀爬机器人的摇杆控制[J].机器人,2012,3(3):363-368.
[2]文雪峰,佃松宜.双吊臂式架空线路机器人的攀爬机构研究[J].机械设计与制造,2013,54(7):168-170.
[3]曹志华,陆小龙.电力铁塔攀爬机器人的步态分析[J].西安交通大学学报,2011,45(8):67-72.
[4]熊友,白国振,周全.通风管道清洁机器人系统的研究[J].机械科学与技术,2012,31(8):1257-1260.
[5]胡杰,管贻生.双手爪爬杆机器人对杆件的位姿检测与自主抓夹[J].机器人,2014,5(5):569-575.
[6]青岛东合信息技术有限公司.Cortex-M3开发技术及实践[M].西安:西安电子科技大学出版社,2013.
[7]林涛.数字电子技术[M].北京:清华大学出版社,2006.
[8]华成英,童诗白.模拟电子技术基础[M].北京:高等教育出版社,2006.
[9]徐科军.传感器与检测技术[M].北京:电子工业出版社,2004.
[10]张晓明.C#网络通信程序设计[M].北京:清华大学出版社,2015.
[11]康华光.电子技术基础模拟部分[M].北京:4版.高等教育出版社,1999.
[12]谢自美.电子线路设计、实验、测试[M].武汉:2版.武汉华中理工出版社,2000.
[13]余锡存.单片机原理及接口技术[M].西安:西安电子科技大学出版社,2000.
[14]李全利.单片机原理及接口技术[M].北京:北京航空航天大学出版社,2004.
[15]李海鹏,吴征.通用航空产业链浅析[J].民航管理,2010(5):24.
[16]王惠生.国外通用航空运行及未来发展趋势[J].民航经济与技术,2000,2(3),20-25.
[17]曹永彦,王培俊.基于单片机的机器人设计与制作[J].实验科学与技术,2010,11(1):22-23.
[18]郝晓红,韩勇,官颂.飞机电类机务维修专业实践教学研究[J].实验科学与技术,2015,13(4):79-82.
[19]刘金玉,李军,戴舜.飞机结构静力试验中杠杆系统的载荷配重[J].实验科学与技术,2012,13(4):30-32.
