带有指令滤波器的模糊反步自适应控制
2018-01-11张胜修虞棐雄曹立佳扈晓翔李浩浩
郑 惠, 张胜修, 虞棐雄, 曹立佳, 扈晓翔, 李浩浩
(1.火箭军工程大学自动控制工程系,西安 710025; 2.四川理工学院自动化与信息工程学院,四川 自贡 643000;3.中国人民解放军96111部队,陕西 韩城 715400)
带有指令滤波器的模糊反步自适应控制
郑 惠1, 张胜修1, 虞棐雄1, 曹立佳2, 扈晓翔1, 李浩浩3
(1.火箭军工程大学自动控制工程系,西安 710025; 2.四川理工学院自动化与信息工程学院,四川 自贡 643000;3.中国人民解放军96111部队,陕西 韩城 715400)
针对固定翼飞行器在飞行控制过程中存在的状态受限以及执行器物理特性限制等问题,提出了一种带有指令滤波器的反步模糊自适应控制器。首先,建立带有误差项的MIMO严反馈系统;其次,建立模糊系统在线逼近子系统误差项,基于Backstepping法对每一个子系统设计虚拟控制律;再次,考虑状态受限和执行器的物理特性(包括幅值和速率受限),将设计的虚拟控制律通过引入幅值、速率和带宽限制的指令滤波器,对滤波误差项进行补偿;最后,运用Lyapunov稳定性定理证明了闭环系统有界且跟踪误差指数收敛于零的一个邻域内。仿真结果表明,设计的控制器具有很强的稳定性和鲁棒性。
飞行控制; 反步模糊自适应控制器; 指令滤波器; 状态受限; 执行器物理特性
0 引言
由于安全原因和系统机构性能等方面的因素,状态约束以及考虑执行器的动态性能广泛存在于实际的控制系统中。因为固定翼飞行器在飞行过程当中,由于飞行环境和自身系统等各方面的影响,状态会受到很多约束(比如固定翼飞行器在机动过程当中的过载约束);同时,由于执行器(舵)本身的机械和电子构成导致其动态性能受限,以上因素使得本文所研究的控制器设计方法在实际的固定翼飞行器控制当中有着较强的现实意义。
近年来,为了满足对状态受限以及考虑执行器动态特性的非线性系统稳定控制的要求,国内外研究者都取得了很多研究成果。文献[1]针对状态约束系统设计反步控制器,控制效果较好,并可应用于输出受到约束的系统研究;文献[2]针对带有状态输出有界约束的一类不确定仿射非线性系统,提出一种单向辅助面滑模控制器设计方法,该方法通过将状态量的约束条件引入单向辅助面的设计,并利用单向辅助面构成系统状态输出量正不变集的边界,以保证系统状态能够满足状态输出量的约束条件;文献[3-8]引入具有幅值、速率与带宽限制的指令滤波器,设计一种反步控制器,将其应用于固定翼飞行器的姿态跟踪控制设计过程,该种方法不但有效地减弱反步法在设计跟踪控制器过程中对期望轨迹n阶可导的限制要求,而且较好地解决了在系统状态与控制信号受限条件下的鲁棒控制问题,但是大部分的研究成果都是建立在函数已知的情况下,即使考虑了函数的不确定性,在控制器设计过程当中也未能将函数的不确定性问题考虑在内,使得控制器在扩展应用的过程当中逼近值或者矩阵存在出现奇异的可能;文献[9]针对执行器动态及其状态受限、状态中存在测量噪声的问题,为伺服系统设计了一种基于非线性高增益观测器的自适应非线性鲁棒跟踪方法,相较传统控制方法,该方法基于系统位置测量值设计高增益观测器,同时利用滤波器来消除外界不确定性干扰,最后设计的控制器具有较强的鲁棒性。另外,近年来许多学者在研究设计控制器时,将BackStepping方法与模糊逼近相结合进行了探索[10-11]。
本文充分考虑了固定翼飞行器控制实际,将执行器的物理特性和系统状态受限纳入约束条件,来最终设计系统的控制律。首先,提出一类带有误差项的MIMO严反馈系统,并提出模糊逻辑系统的定义;其次,对每个子系统中的误差项通过建立模糊系统来在线逼近,而后基于Backstepping方法对每一个子系统设计虚拟控制律;再次,考虑系统状态受限和执行器物理特性,引入指令滤波器,将虚拟控制律通过指令滤波器进行处理,并对滤波误差项进行补偿;最后,利用Lyapunov理论对系统进行稳定性分析,并仿真验证控制器的有效性和稳定性。
1 问题描述
以固定翼飞行器作为研究对象,依据相关文献[12],结合固定翼飞行器的结构特点以及飞行环境,忽略一些次要因素,合理做出如下假设条件。
假设1忽略地球曲率和自转,将地面坐标系视为惯性系统。
假设2固定翼飞行器的外形对称,质量分布均匀,结构强度足够。
假设3推力方向与固定翼飞行器纵轴方向保持严格一致,不再考虑推力在侧向上的影响。
假设4固定翼飞行器处于亚音速飞行状态。
根据以上假设,结合运动学和动力学原理,建立了固定翼飞行器在飞行条件下的6-DOF非线性动态模型,可表示为
(1)
(2)
(3)

(4)
(5)

(6)

(7)
(8)
(9)
(10)

针对固定翼飞行器非线性动态模型,考虑选取角度状态变量x1,角速度状态变量x2,建立固定翼飞行器的非线性系统,即
(11)

本文的控制目的是使系统能够有效稳定跟踪控制指令x1d=(αd,βd,μd)。为便于控制器的设计与系统的稳定性分析证明,引入假设5和假设6。

值得一提的是,在实际跟踪控制指令信号中,飞行器制导过程中,相应指令会将飞行器的过载、机械等约束考虑在内,因此指令信号通常都是有界的。将参考指令进行二阶滤波获得新的参考指令,为的是使其一阶和二阶导数均存在且有界。

类似假设6的说法,在很多研究中普遍采用,如文献[14-15]。文献[15]对控制尾舵变化导致气动力改变进行了分析研究,结果表明这个影响可以忽略。通常情况下,当气动控制舵的有效面积相比气动力的主要来源——主翼和载体的有效面积较小时,这个假设是成立的,本文研究的飞行器就是此类情况。另外,本文还引入了误差项,也可以将控制尾舵产生的气动力影响折合到误差估计当中。
最终,在以上前提条件下,固定翼飞行器非线性模型(式(11))可以转化为MIMO纯反馈系统,即
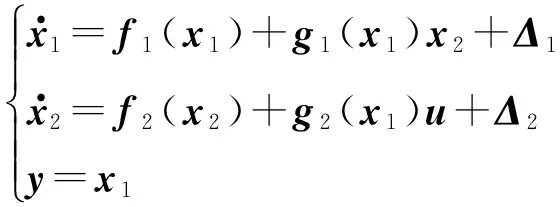
(12)
2 控制器设计
本文研究的目的是在考虑执行器(偏转舵)动态特性以及系统状态受限的情况下设计控制器,使得系统输出能够稳定、准确地跟踪系统参考输入信号,具有很强的鲁棒性。控制器的设计过程如下。
1) 设计虚拟控制信号x2d。考虑式(12)第1个子系统
(13)
上一节探讨了电影与新闻之间“跨世界通达”的普遍性。这一节我们将结合“底本”与“述本”这一对观念来分析电影叙述与新闻叙述之间通达关系生成的基本机制。

(14)
虚拟控制器x2d设计如下

(15)

(16)
式中,变量ξ1为

(17)
式中,变量x2c和ξ2将会在下一步的控制器设计中给出。
由于跟踪系统的期望状态yd受限,因此在虚拟控制律式(15)中所采用的是yd的受限状态yd,具体方法是参照文献[15-17],将yd作为输入通过如式(18)的指令滤波器,进而获得受限输出yc。

(18)


(19)
(20)

2) 设计系统控制信号uc。考虑式(12)中的第2个子系统
(21)
同样的,建立模糊系统对Δ2进行在线逼近,具体为

(22)

(23)
式中:k2为正的控制器设计参数;与第一步控制器设计同理,充分考虑执行器(舵)的动态特性,利用第一步提出的指令滤波器对控制输入xd进行滤波处理得到满足要求的实际控制输入xc。
另外,变量ξ2为

(24)

(25)
(26)

以上就是状态受限系统在充分考虑执行器(舵)的动态特性情况下控制器设计的具体过程。为了清晰表述整个控制器设计流程,图1为直观的控制器设计结构框图。
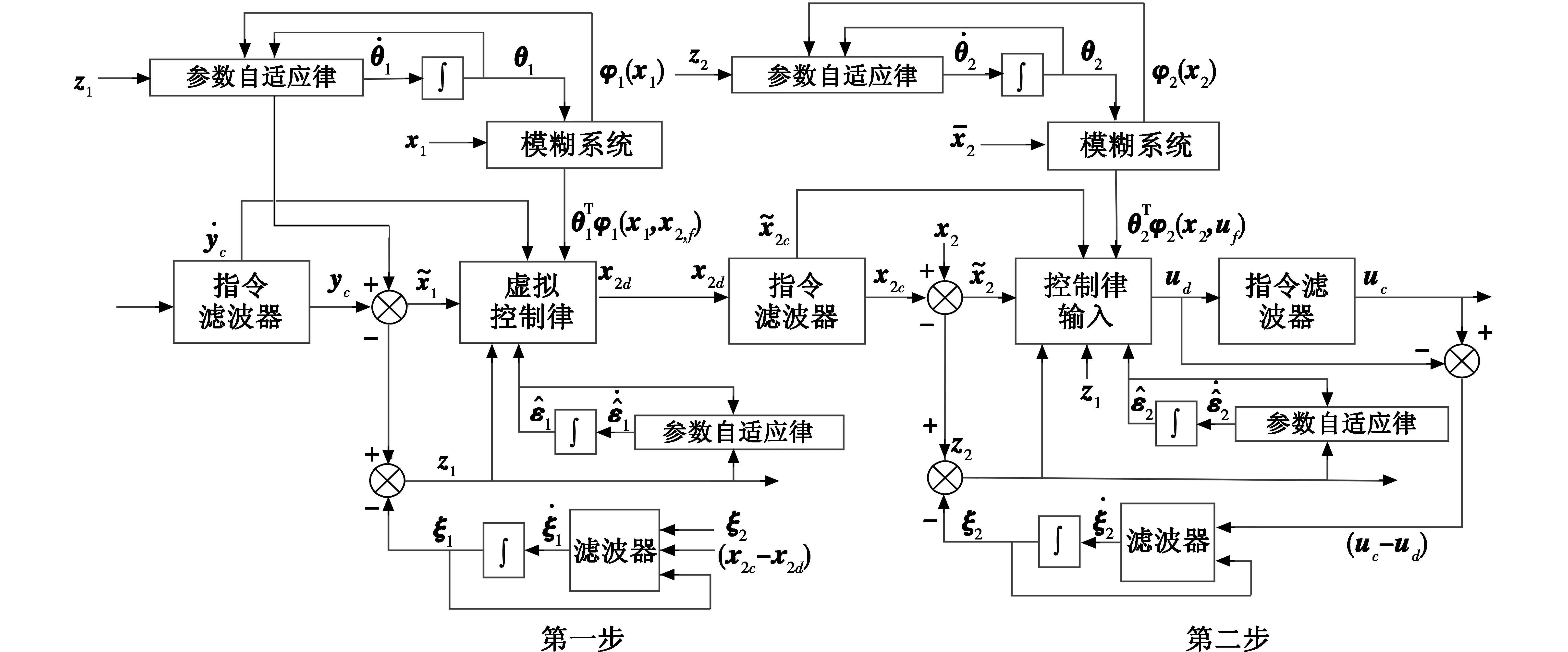
图1 带有指令滤波器的模糊反步控制流程图Fig.1 Flow chart of the backstepping controller design based on error estimation
3 稳定性证明
在上文研究中考虑执行器(舵)动态特性以及状态受限等约束条件,引入指令滤波器,建立模糊系统逼近误差,最终设计了反步自适应控制器。本章利用Lyapunov稳定性定理对控制系统的闭环稳定性进行分析。
首先,对跟踪动态误差进行动态分析。

(27)
把式(14)和式(15)代入式(16),可得

(28)

(29)
其次,对扩展跟踪动态误差进行动态分析。

(30)
(31)
选择如下Lyapunov函数
(32)
对式(32)进行求导,可得
(33)
将式(30)和式(31)代入式(33),可得

(34)
整理式(34)得
(35)

根据Young’s不等式,并代入参数的自适应律,其中i=1,2,可得

(36)

(37)

再将式(36)和式(37)代入式(35),可得
(38)


(39)
根据上文可知,上述闭环系统状态和跟踪误差是有界的。只要各设计参数选择合适,在考虑执行器(舵)动态特性和状态受限约束条件下,系统跟踪误差仍然能够收敛到零附近很小的一个邻域内。
4 仿真分析
本文以存在未知不确定性的固定翼飞行器非线性模型作为控制对象,在考虑系统状态受限、执行器(舵)受限以及其执行器速率受限等因素,利用Matlab对控制系统进行仿真研究。通过跟踪控制指令信号的情况来对本文所设计的控制系统的控制效果进行验证。
表1说明了满足实际系统要求的执行机构(舵)的动态特性。
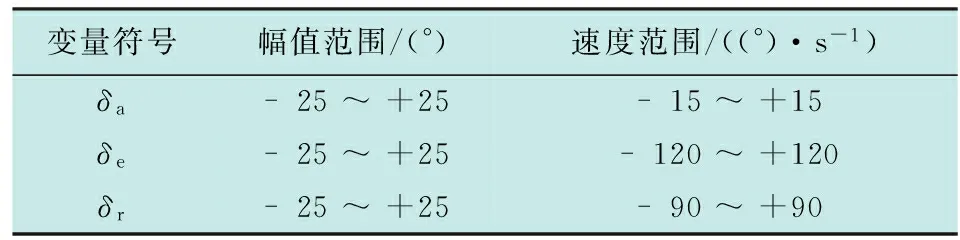
表1 执行器(舵)的动态特性
图2~图6给出了在Matlab中对6-DOF固定翼飞行器控制系统的仿真图。其中,图2~图4分别表示攻角、侧滑角和速度矢量的跟踪曲线,从图中可以看出所设计的控制器能够很好地跟踪参考指令信号,稳定性好;图5表示3个虚拟舵偏角变化情况,参照表1数据可以看出,3个舵偏角都在系统允许范围内;图6表示3个虚拟舵偏角速度变化情况,同样参照表1数据,最终仿真得到的舵偏角速度变化也满足执行器(舵)动态特性要求。
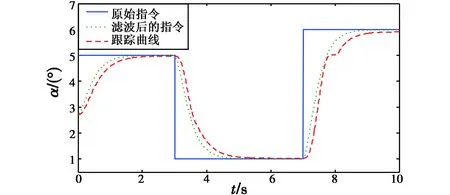
图2 攻角跟踪曲线Fig.2 Curves of attack angle

图3 侧滑角跟踪曲线Fig.3 Curves of sideslip angle

图4 速度矢量跟踪曲线Fig.4 Curves of roll angle rate
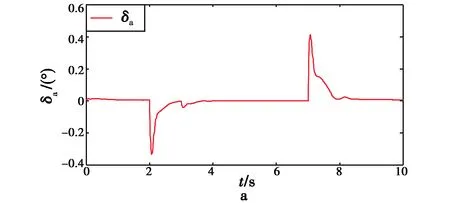

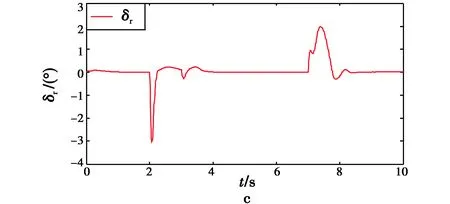
图5 虚拟舵偏角变化Fig.5 Curves of virtual elevator angle
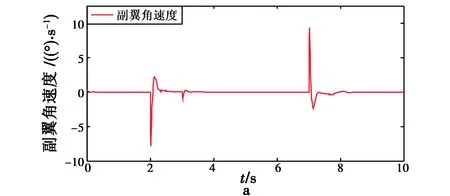
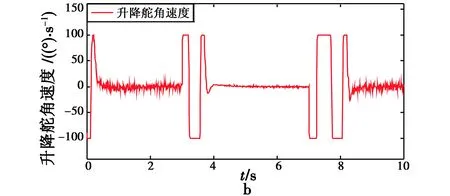
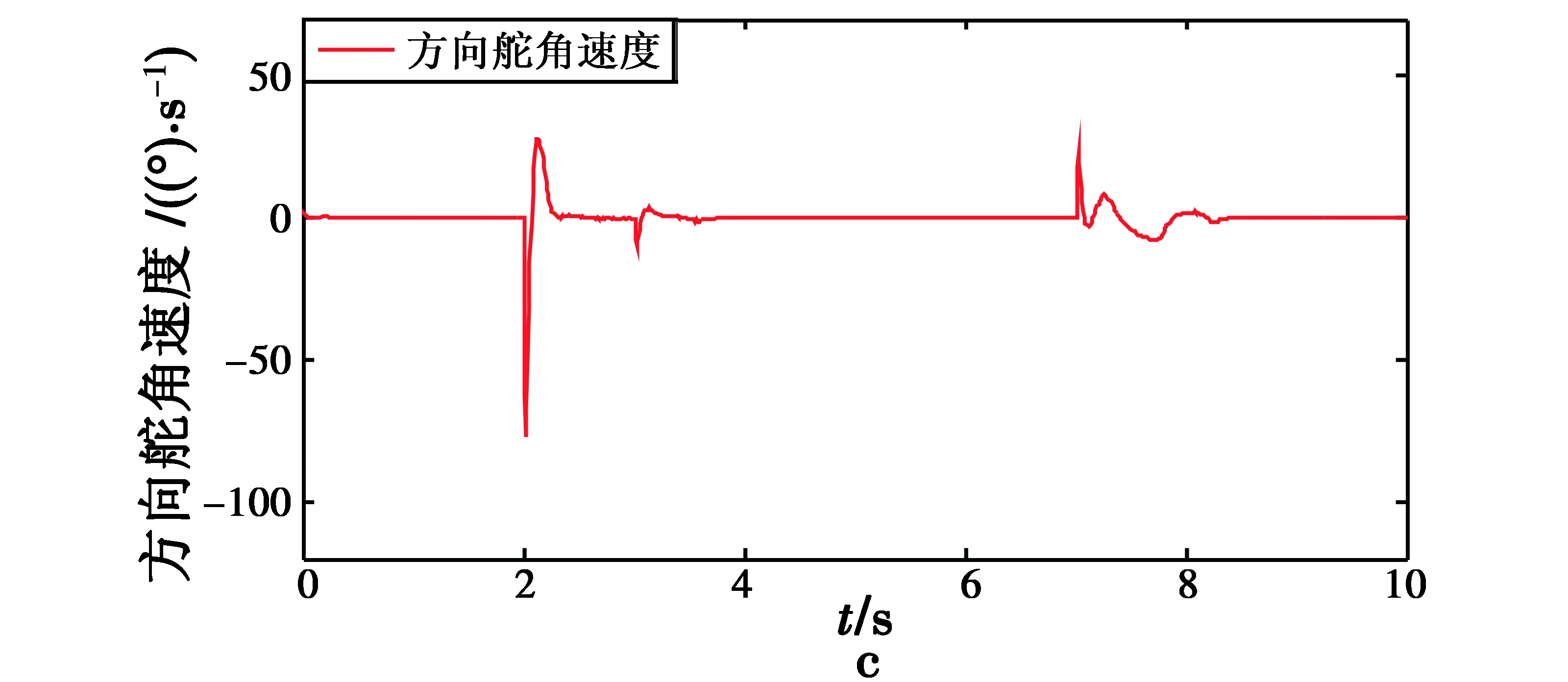
图6 虚拟舵偏角速度变化Fig.6 Curves of virtual elevator angle rate
仿真结果可以看出,本文所设计的控制器能够在系统状态受限以及考虑执行器(舵)动态特性的情况下,稳定可靠地对固定翼飞行器进行控制。
5 结论
本文充分考虑控制系统状态受限以及执行器(舵)的物理特性,引入具有幅值、速率和带宽限制的指令滤波器,建立模糊系统在线逼近系统的未知项,利用Backstepping方法设计了一种模糊自适应鲁棒非线性飞行控制器,并考虑系统状态受限以及执行器(舵)的物理特性,引入指令滤波器。最后,通过仿真结果分析表明,在存在外界未知干扰的情况下,本文所设计的控制器具有很好的稳定性和鲁棒性,满足固定翼飞行器的飞行控制要求。由于本文中模糊系统在线逼近计算量较大,所以下一步将研究用基于传感器的反步控制(SBB)方法来降低计算量。
[1] 黄喜元,王青,董朝阳.基于Backstepping的高超声速飞行器鲁棒自适应控制[J].系统工程与电子技术,2011,33(6):1321-1326.
[2] 黄宇海,齐瑞云,姜斌,等.基于动态面backstepping控制的高超声速飞行器自适应故障补偿设计[J].中国科学技术大学学报,2012,42(9):768-774.
[3] XU B,WANG S X,GAO D X,et al.Command filter based robust nonlinear control of hypersonic aircraft with magnitude constraints on states and actuators[J].Journal of Intelligent & Robotic Systems,2014,73(1):233-247.
[4] JI Y H,ZONG Q,ZHOU H L.Command filtered back-stepping control of a flexible air-breathing hypersonic flight vehicle[J].Proceedings of the Institution of Mechanical Engineers,2014,228(9):1617-1626.
[5] FARRELL J A,POLYCARPOU M,SHARMA M,et al.Command filtered backstepping[J].IEEE Transactions on Auto-matic Control,2009,54(6):1391-1395.
[6] DONG W J,FARRELL J A,POLYCARPOU M,et al.Command filtered adaptive backstepping[J].IEEE Transactions on Control System Technology,2012,20(3):566-580.
[7] HU X,KARIMI H R,GAO H J,et al.Non-fragileH∞tracking control for flexible air-breathing hypersonic vehicles[J].IFAC Proceedings Volumes,2012,45(4):242-247.
[8] LEI Z D,WANG M,YANG J Y.Nonlinear robust control of a hypersonic flight vehicle using fuzzy disturbance observer[J].Mathematical Problems in Engineering,2013(21):369092-10.
[9] 陈洁,周绍磊,宋召青.基于不确定性的高超声速飞行器动态面自适应反演控制系统设计[J].宇航学报,2010,31(11):2550-2556.
[10] SWAROOP D,HEDRICK J K,YIP P P,et al.Dynamic surface control for a class of nonlinear systems[J].IEEE Transactions on Automatic Control,2000,45(10):1893-1899.
[11] 王永超,张胜修,曹立佳,等.输入受限的非线性系统自适应模糊backstepping控制[J].控制理论与应用,2015,32(12):1669-1675.
[12] WEN C Y,ZHOU J,LIU Z T,et al.Robust adaptive control of uncertain nonlinear systems in the presence of in-put saturation and external disturbance[J].IEEE Tran-sactions on Automatic Control,2011,56(7):1672-1678.
[13] WANG L X.Stable adaptive fuzzy control of nonlinear systems[J].IEEE Transactions on Fuzzy Systems,1993, 1(2):146-155.
[14] 王立新.自适应模糊系统与控制——设计与稳定性分析[M].北京:国防工业出版社,1995.
[15] FARRELL J A,POLYCARPOU M,SHARMA M.Adaptive backstepping with magnitude,rate,and bandwidth constraints:aircraft longitude control[C]//American Control Conference,2003:3898-3904.
[16] CAO L J,ZHANG S X,LI X F,et al.Nonlinear adaptive block backstepping control using command filter and neural networks approximation[J].Information Technology Journal, 2011,10(12):2284-2291.
[17] YOON S H,KIM Y D,KIM S K.Pursuit guidance law and adaptive backstepping controller design for vision-based net-recovery UAV[C]//AIAA Guidance,Navigation,& Control Conference,2006:172-183.
[18] 曹立佳.多不确定性固定翼飞行器鲁棒非线性控制技术研究[D].西安:第二炮兵工程大学,2012.
FuzzyBacksteppingAdaptiveControllerwithaCommandFilter
ZHENG Hui1, ZHANG Sheng-xiu1, YU Fei-xiong1, CAO Li-jia2, HU Xiao-xiang1, LI Hao-hao3
(1.Department of Control Engineering,Rocket Force of University of Engineering,Xi’an 710025,China;2.College of Automation and Information Engineering,Sichuan University of Science & Engineering,Zigong 643000,China;3.No.96111 Unit of PLA,Hancheng 715400,China)
A fuzzy backstepping adaptive controller with a command filter was designed for a fixed-wing aircraft to overcome the problems of the restricted state and actuator’s physical characteristics during the flight control process.First,the MIMO strict feedback system with error terms was developed.Secondly,a fuzzy system was developed to approach the error terms of the subsystem online,and the virtual control law was designed for each subsystem based on Backstepping method.Thirdly,considering the state constraints and the physical characteristics of actuators (including the constraints of amplitude and rate),a command filter with constraints on amplitude,rate and bandwidth was introduced into the designed virtual control law to compensate for the filter error term.Finally,Lyapunov stability theorem was used to prove that the closed-loop system is guaranteed to be bounded,and the tracking error converges exponentially to a small neighborhood around zero.The simulation results show that the designed controller has strong stability and robustness.
flight control; fuzzy backstepping adaptive controller; command filter; limited state; physical characteristics of actuator
郑惠,张胜修,虞棐雄,等.带有指令滤波器的模糊反步自适应控制[J].电光与控制,2017,24( 11) : 16-21,27.ZHENG H,ZHANG SX,YU F X,et al.Fuzzy backstepping adaptive controller with a command filter[J].Electronics Optics & Control,2017,24( 11) : 16-21,27.
2016-10-24
2016-12-22
国家自然科学基金(61304001,61304239)
郑 惠(1993 —),男,内蒙古呼和浩特人,硕士生,研究方向为固定翼飞行器鲁棒自适应控制。
TP273.2
A
10.3969/j.issn.1671-637X.2017.11.004
