基于加权最小二乘法的RAIM 算法研究
2018-01-11王尔申杨福霞贾超颖曲萍萍
王尔申,杨福霞,贾超颖,曲萍萍,庞 涛
(沈阳航空航天大学,a.电子信息工程学院; b.辽宁省通用航空重点实验室,沈阳 110136)
基于加权最小二乘法的RAIM 算法研究
王尔申a,b,杨福霞a,贾超颖a,曲萍萍a,庞 涛a
(沈阳航空航天大学,a.电子信息工程学院; b.辽宁省通用航空重点实验室,沈阳 110136)
针对最小二乘法在卫星故障检测和识别中存在的问题,研究将加权最小二乘算法用于卫星故障检测和识别,该算法将测量方程的协方差矩阵对角线元素作为加权因子,进而得到基于加权最小二乘法的卫星故障检测算法。通过各颗卫星伪距残差的平方和建立检验统计量,根据故障检测误警率和概率密度函数得到检测门限,将计算得到的伪距残差平方和与检测门限进行比较,进而实现故障的检测和隔离。结合实测数据,验证对比了两种算法的性能,结果表明:加权最小二乘RAIM算法在故障检测的灵敏度和故障识别性能方面优于最小二乘RAIM算法的性能。
北斗卫星导航系统; RAIM; 最小二乘算法; 加权最小二乘算法
0 引言
完好性是指卫星导航系统出现故障不能用于导航时及时向用户进行告警的能力。这些故障可能是卫星上的电子故障、卫星播发的卫星星历和时钟模型偏差、异常大气层延时及接收机故障等。完好性监测就是将故障引起的定位误差的发生控制在一定的概率内[1],保障卫星导航定位结果的可靠性。接收机自主完好性监测(Receiver Autonomous Integrity Monitoring,RAIM)是利用接收机内部冗余观测值的一致性检验进行完好性监测。传统最小二乘RAIM算法中的估计准则是观测值误差平方和最小,其思想是以测量值的一致性为基础进行最小二乘估计,通过获得观测量误差的距离残差矢量,进而根据概率分布确定故障检测统计量和检测门限实现故障检测[2]。
卫星导航伪距测量值中包含多种误差,包括与卫星有关的卫星时钟误差、卫星星历误差,与信号传播有关的大气延时误差(分为电离层延时和对流层延时),与接收机有关的多路径效应和电磁干扰。在有SA(Select Availability)政策时,SA是主要的误差影响,上述这些误差可以忽略不计;在取消SA政策时,电离层和对流层成为主要的误差影响。因为不同仰角的卫星信号穿过大气层角度不同,伪距测量误差就不同[3]。因此,本文在最小二乘算法(Least Squares,LS)的基础上,考虑各误差对卫星伪距测量值误差的不同影响,研究了一种加权最小二乘RAIM算法[4](Weighted Least Squares,WLS),并对加权因子选择进行了分析,通过实测数据进行了仿真验证。
1 加权最小二乘RAIM算法
1.1 故障检测模型
GNSS伪距观测量的线性化方程为
y=HX+ε
(1)
式中:y是观测伪距量减去利用卫星的坐标和用户接收机的坐标计算得到的距离组成的n×1维矢量;H是n×4维的观测矩阵,是由各卫星到用户接收机的方向余弦向量和第4列全为1的元素构成的线性化矩阵;X为未知的矢量,包括接收机的三维位置和接收机钟差;ε为n×1维观测噪声矢量,服从均值为0、方差为σ2的高斯分布。
根据最小二乘估计准则,对式(1)运用最小二乘估计求解,得到的解为

(2)
如果对式(1)观测方程两边同时左乘加权矩阵,并结合式(2)对方程进行最小二乘估计,此时得到的解为
(3)
式中,W为加权矩阵。
伪距残差矢量v为

(4)
式中:矩阵A的协因数矩阵为Q=W-1-H(HTW·H)-1HT。
伪距残差平方和为
SSSEWLS=vTv=yTWy。
(5)
当观测噪声ε服从正态分布,SSSEWLS服从自由度为(n-4)的χ2分布,因此,对SSSEWLS作二元假设,给定误警率PFA和概率密度函数,利用式(6)求得tWLS。

(6)


1.2 故障识别模型
故障识别依据巴尔达研究的数据探测法,该方法基于最小二乘残差矢量构造统计量,且该统计量服从某种分布,给定显著水平,通过对统计量进行检验判断某卫星是否为故障星。因此根据残差和观测误差的关系式,定义故障识别的检测统计量为

(7)
式中:i=1,2,…,n,n是可见卫星数;vi为利用加权最小二乘法求得的伪距残差;Q=W-1-H(HTWH)-1HT,Qii是矩阵Q的第i行第i列;di服从正态分布,即di~N(0,1),对di做二元假设,给定总体的误警率PFA,则可以计算出对应的检测门限TWLSe,算式为

(8)
2 加权因子的计算
卫星的信号从发出到用户接收的过程中会受到各种误差的影响,分析这些误差并抑制和减弱其影响,将有助于提高导航定位性能。在GNSS定位中,包含多种误差,如卫星钟差、卫星星历误差、大气延时误差(分为电离层和对流层)、多路径效应和电磁干扰等。而在利用最小二乘残差法进行故障检测和识别时没有充分考虑这些误差对同一系统内的卫星有不同的影响,因此,在最小二乘残差的基础上,充分考虑这些误差对同一系统内的卫星有不同的影响,研究了加权最小二乘残差法,利用这些误差对每个卫星的不同影响作为加权因子,选取这些误差的方差和的倒数作为加权因子。

(9)

(10)
3 算法验证和结果分析
为了验证加权最小二乘算法在故障检测和识别中的有效性,选用GPS星座,采集以2014年5月29日00点开始的24 h的数据,接收机坐标为(-2 965 385.050,-972 576.616, 5 543 892.887),单位为m。同时,通过验证所采集的数据期间并未有故障发生。


表1 GPS作为辅助导航时不同航路阶段的完好性要求
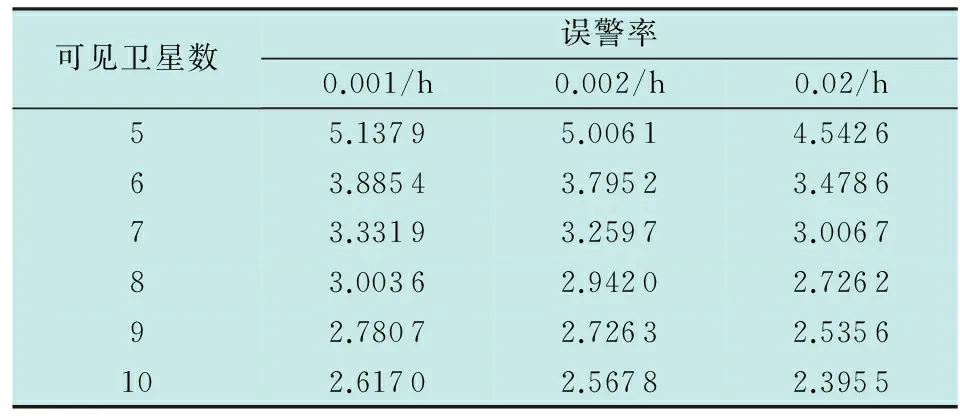
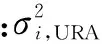
表2 检测门限值TDWLS
从表2可看出,相同的误警率,随着可见卫星数的增加,检测门限值变大;相同的可见卫星数,随着误警率的增加,检测门限值变小。
在验证中设定误警率为0.002/h,为了验证算法的检测性能,人为地对12号卫星的1~18 000历元的伪距添加不同的偏差,并分别利用最小二乘RAIM算法和加权最小二乘RAIM算法进行故障检测和识别。
图1为在1~18 000历元中添加偏差。在添加如图1所示的偏差下,分别利用最小二乘法和加权最小二乘法进行故障检测,得到如图2结果。
图1 添加伪距偏差值Fig.1 Adding pseudo-range bias

图2 最小二乘法和加权最小二乘法故障检测Fig.2 Least squares and weighted least squares fault detection
图2为在添加图1所示的故障下显示的故障检测结果。其中在2000~16 000历元分别加入偏差值为50 m和65 m的阶跃故障,利用最小二乘法和加权最小二乘法得到检测统计量都大于检测门限,因此,两种算法都能够检测到故障;在4000~6000历元以及在8000~14 000历元分别加入偏差值为55 m和60 m的阶跃故障,利用最小二乘法和加权最小二乘法得到检测统计量都大于检测门限,因此,可得利用最小二乘法和加权最小二乘法都能够检测到故障,两种算法都有效。
为了验证加权最小二乘RAIM算法的故障检测和识别性能,并与最小二乘RAIM算法比较。仿真时选取1~18 000历元数据,对第12号卫星的伪距中人为加入故障偏差,偏差值从0 m递增到100 m,步长为5 m,分别用最小二乘法和加权最小二乘法每隔10个历元进行一次故障检测和识别。
从图3可以看出,在加入的相同伪距偏差下,加权最小二乘RAIM算法的故障检测率都大于最小二乘RAIM算法。当伪距偏差为40 m时,最小二乘RAIM算法的故障检测率为0,加权最小二乘RAIM算法的故障检测率为51.94%;当伪距偏差为55 m时,最小二乘RAIM算法的故障检测率为90.72%,加权最小二乘RAIM算法的故障检测率为94.44%;当伪距偏差为75 m时,最小二乘RAIM算法的故障检测率为99.39%,加权最小二乘RAIM算法的故障检测率为100%;当伪距偏差为大于80 m时,最小二乘RAIM算法和加权最小二乘RAIM算法的故障检测率均为100%。由此可得,加权最小二乘RAIM算法对故障的敏感度更高,并具有比最小二乘RAIM算法更强的检测性能。

图3 最小二乘法和加权最小二乘法故障检测率Fig.3 Fault detection rate of least squares method and weighted least squares method
图4给出了检测到存在故障卫星时,加权最小二乘RAIM算法与最小二乘RAIM算法的故障识别率的比较。
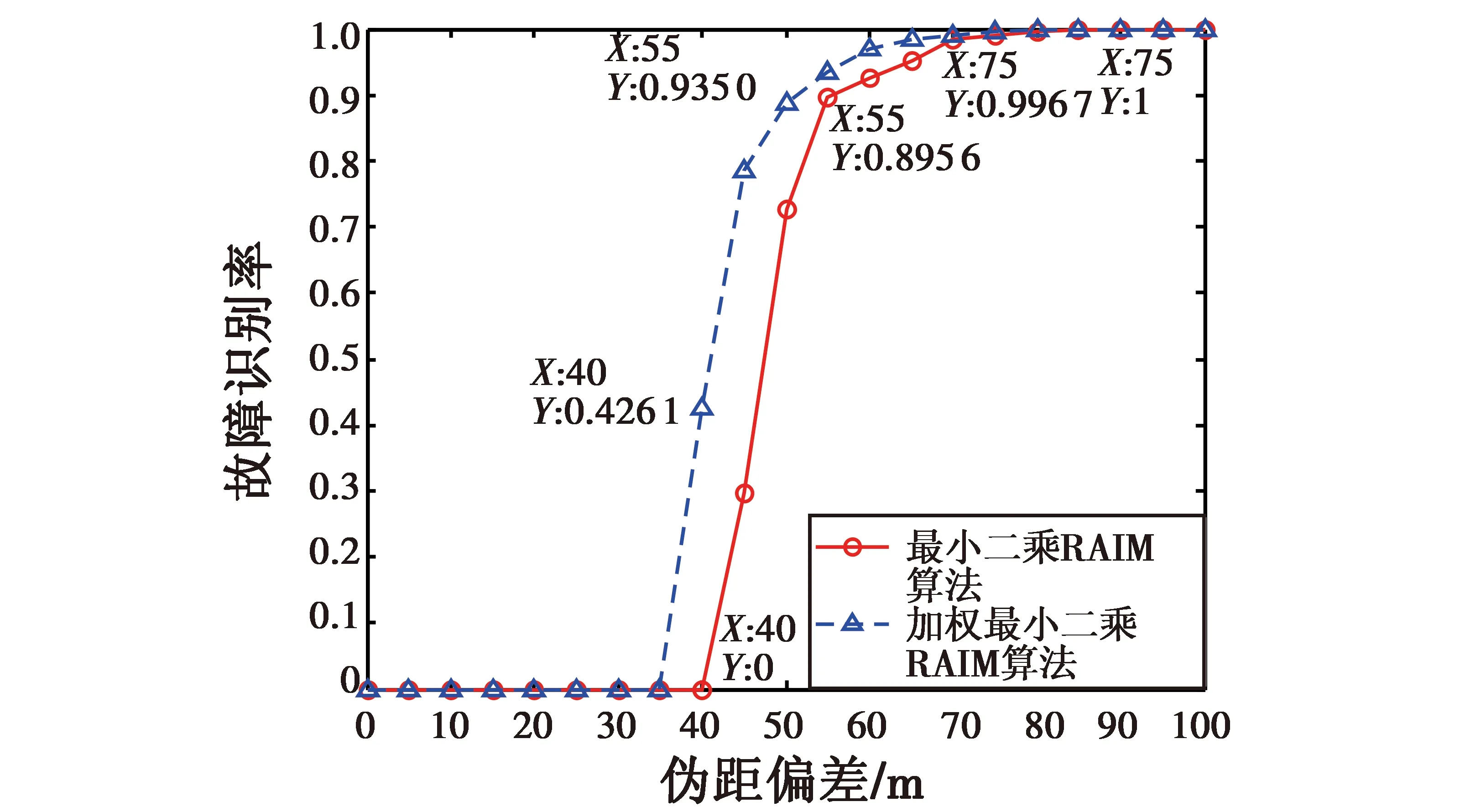
图4 最小二乘法和加权最小二乘法故障识别率图Fig.4 Fault identification rate of least squares method and weighted least squares method
从图4可以看出,加权最小二乘RAIM算法的故障识别率都大于最小二乘RAIM算法。当伪距偏差为40 m时,最小二乘RAIM算法的故障识别率为0,加权最小二乘RAIM算法的故障检测率为42.61%;当伪距偏差为55 m时,最小二乘RAIM算法的故障检测率为89.56%,加权最小二乘RAIM算法的故障检测率为93.50%;当伪距偏差为75 m时,最小二乘RAIM算法的故障检测率为99.67%,加权最小二乘RAIM算法的故障检测率为100%;当伪距偏差为大于80 m时,最小二乘RAIM算法和加权最小二乘RAIM算法的故障检测率均为100%。由此可得,加权最小二乘RAIM算法对故障的敏感度更高,由此并具有比最小二乘RAIM算法更好的识别性能。
4 结论
本文研究了加权最小二乘法,建立了进行故障检测和识别的RAIM算法模型,同时分析了加权矩阵,给出了算法的详细流程和加权因子的计算方法。通过实测数据对算法进行了验证,结果表明:加权最小二乘RAIM算法在故障检测和识别性能等方面优于采用最小二乘RAIM算法,其结果对北斗卫星导航接收机自主完好性监测具有一定的参考价值。
[1] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2014.
[2] 娄上月.接收机自主完好性监测及系统仿真研究[D].哈尔滨:哈尔滨工程大学,2012.
[3] 朱衍波,张淼艳,张军.加权RAIM可用性预测方法研究[J].遥测遥控,2009,30(1):1-4.
[4] WALTER T,ENGE P.Weighted RAIM for precision approach[C]//Proceedings of ION GPS,1995:72-89.
[5] 杨林,吴德伟,卢虎,等.GNSS组合系统用户完好性监测保护门限算法研究[J].电光与控制,2014,21(10):61-64.
[6] RTCA.DO-229C minimal operational performance stan-dards for global positioning system/wide area augmentation system airborne equipment[S].Washington:RTCA Inc,2001.
[7] GPS Joint Program Office.IS-GPS-200 NAVSTAR GPS space segment/navigation user interfaces[S].EI Segundo:ARINC Engineering Services,2003.
[8] LEANDRO R,SANTOS M,LANGLEY R B.UNB neutral atmosphere models:development and performance[J].Proceedings of ION NTM,2006,52(1):564-573.
[9] 焦卫东,唐志虎,沈笑云.电离层与对流层模型对北斗RAIM可用性的影响分析[J].通信学报,2015,36(3):74-81.
[10] 孙晓剑.GNSS完备性监测RAIM算法研究[D].长沙:中南大学,2012.
[11] 吕小平.中国民航GPS卫星的完好性监测系统[J].中国民用航空,2001(7):65-67.
ResearchonRAIMAlgorithmBasedonWeightedLeast-SquareMethod
WANG Er-shena,b, YANG Fu-xiaa, JIA Chao-yinga, QU Ping-pinga, PANG Taoa
(Shenyang Aerospace University,a.School of Electronic and Information Engineering;b.Liaoning General Aviation Key Laboratory,Shenyang 110136,China)
In order to solve the problems of the least-square method in satellite fault detection,a Weighted Least-Square (WLS) algorithm is proposed for satellite fault detection and recognition.The algorithm uses the diagonal-line factor in the covariance matrix of the measurement equation as the weighting factor.Then the satellite-fault-detection algorithm based on the WLS method is obtained.The test statistic is established by using the quadratic sum of the pseudo-range residual errors of each satellite.The detection threshold is obtained from the false alarm rate of the fault detection and the probability density function.The calculated quadratic sum of the pseudo-range residual error is compared with the detection threshold,and then the fault detection and isolation is realized.Analysis is made to the performance of the two algorithms according to the measured data.The results show that the WLS RAIM algorithm is superior to the least-square RAIM algorithm on the fault detection sensitivity and fault recognition performance.
Beidou Satellite Navigation System (BDS); Receiver Autonomous Integrity Monitoring (RAIM); least-square method; weighted least-square method
王尔申,杨福霞,贾超颖,等.基于加权最小二乘法的RAIM 算法研究[J].电光与控制,2017,24 ( 11) : 7-10.WANG E S,YANG F X,JIA C Y,et al.Research on RAIM algorithm based on weighted least-square method[J].Electronics Optics & Control,2017,24( 11) : 7-10.
2016-11-01
2017-01-15
国家自然科学基金(61571309,61101161);辽宁省“百千万人才工程 ”资助项目
王尔申(1980 —),男,辽宁辽阳人,博士,副教授,研究方向为卫星导航和接收机信号处理算法。
V241.6; TN967.1
A
10.3969/j.issn.1671-637X.2017.11.002
