交叉口有轨电车优先控制的检测器位置设计*
2018-01-11王宝杰项昀王炜付旻李烨
王宝杰 项昀 王炜 付旻 李烨
(1.长安大学 公路学院,陕西 西安 710064; 2.东南大学 城市智能交通江苏省重点实验室,江苏 南京 210096)
交叉口有轨电车优先控制的检测器位置设计*
王宝杰1,2项昀2王炜2付旻2李烨2
(1.长安大学 公路学院,陕西 西安 710064; 2.东南大学 城市智能交通江苏省重点实验室,江苏 南京 210096)
在城市道路交叉口应用感应式信号优先控制,是确保城市现代有轨电车节能、环保、舒适与高效优势有效发挥的重要措施.针对交叉口车辆到达检测器安装位置问题,提出了一种配合现代有轨电车信号优先控制的交叉口检测器位置设计方法.首先,根据交叉口现代有轨电车的优先控制策略及其到达停车线的时刻分布,将现代有轨电车等候绿灯的情况划分为7类,并分别提出了绿灯等候时间的计算方法;其次,以检测器、站点与上游相邻交叉口的位置关系分析为基础,建立了检测器位置的计算模型;最后,应用南京河西新城有轨电车规划资料与现状交通实测数据,对设计方法的有效性与可行性进行了检验.结果表明, 该方法实用科学,具有很好的工程应用前景.
城市现代有轨电车;检测器;信号优先控制
城市现代有轨电车是一种采用新型低地板技术,并配置多模块铰接钢轨车辆、弹性车轮、电力牵引、专有路段车道和道路平交交叉口路权的特殊轻轨形式,具有运行速度快、环保节能、安全性高和造价合理等突出优势[1].我国当前在建或规划的现代有轨电车线路高达50多条,规划里程超过2 000多公里,规划投资超3 000亿元,已投资近490亿[2].
城市现代有轨电车线路通常被配置平面交叉口以及混合空间路权.社会车辆的冲突影响与交叉口信号管控是引发现代有轨电车交叉口停车的主要影响因素.根据南京市主要地面公交线路的延误调查数据,站点延误占公交车运行延误的36.05%,交叉口延误占总延误的63.95%.为确保现代有轨电车享有较高的运行效能,交叉口主动式优先控制被广泛应用于城市交通管控中[3],研究成果主要集中在现代有轨电车交叉口信号优先控制与干线协调控制方法,以及现代有轨电车信号优先控制与速度优化等方面[3-6].其中,交叉口信号优化控制主要采用插入现代有轨电车独立相位,以及现代有轨电车共用相位的早启与延长等控制策略[7-9].为提高交叉口时空路权资源的利用率,科学与合理地布设车辆到达检测器是在交叉口有效实施信号优先控制的关键问题.当检测器距离交叉口停车线过近时,交叉口信号机的反应时间不足,无法及时调整信号控制策略来保障现代有轨电车电车优先通行;当检测器距离交叉口停车线过远时,信号机过早地切换和调整现代有轨电车优先信号控制策略,则会严重影响其他地面交通的通行.因此,现代有轨电车到达检测器位置设置不当,交叉口信号优先控制不但未能有效提高现代有轨电车的运行效率,而且会显著增加非优先相位的交通运行延误.部分学者针对常规公交检测器位置布设已经展开了研究,Koonce等[10]提出了由绿灯延长时间、站点位置和上游交叉口距离决定的检测器位置范围确定方法;Liu等[11]定量分析了检测器位置与信号优先控制效益的关系;Zhou等[12]建立了基于公交车利用右转车道插队控制的检测器位置布设模型,并进行了仿真验证;严飞等[13]研究了有信号灯倒计时情况下的公交相位绿灯延长和提前启亮两种感应控制策略的检测器最佳布设位置.但是,现有研究仍无法为工程实践中定量确定车辆到达检测器的位置提供指导.针对现代有轨电车优先运行控制技术的车辆到达检测器位置的研究,具有迫切需求.
文中应用最优化理论建立基于车辆到达检测器位置的现代有轨电车交叉口运行效率的最优模型,首先,以电车信号优先控制策略为基础,依据交叉口进口道相位显示,将有轨电车到达停车线的时刻划分为7种情况;其次,引入电车加减速时间、站点停靠时间和路段行驶时间模型,提出检测器位置确定方法;最后,应用南京市河西新城现代有轨电车运营数据,对所提方法进行验证.
1 有轨电车到达时刻分布
为降低对非优先相位车辆的运行影响,交叉口通常采用干线绿波控制与部分信号优先控制来实现现代有轨电车的优先通行.部分信号优先控制的主要控制策略是现代有轨电车相位早起和迟断控制.根据现代有轨电车到达交叉口停车线时的信号显示,现代有轨电车的到达时刻可以划分为7个分布区间.模型参数定义如表1所示.

表1 模型参数的定义Table 1 Definition of model parameters
设交叉口周期的运行起始时刻和现代有轨电车的运行起始时刻相同,则现代有轨电车在交叉口停车等候绿灯的时间如下所示.


(1)
Tarr=MaxRbrk
(2)
T3=T(MinGn-1+y)-Tarr
(3)

时,现代有轨电车到达交叉口停车线时刻分布在非电车相位,且当前相位的绿灯时间已不可压缩.现代有轨电车在交叉口停车等候绿灯的时间为
T4=T(Gn-1+y)-MaxRbrk-Tarr
(4)

时,现代有轨电车到达交叉口停车线时刻分布在非电车相位,且当前相位的绿灯时间已不可压缩.现代有轨电车在交叉口停车等候绿灯的时间为
T5=0
(5)
T6=0
(6)
Tarr-MaxRbrk
(7)
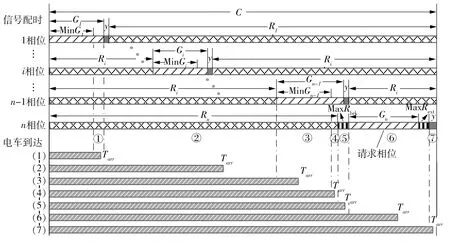
图1 有轨电车优先控制情况下的绿灯等候时间分布Fig.1 Distribution of streetcars’ waiting time in the case of streetcar priority control at the intersection
2 检测器布设位置设计
依据交叉口、现代有轨电车检测器、现代有轨电车站点的位置关系,分5类情况构建现代有轨电车检测器布设位置的计算模型.
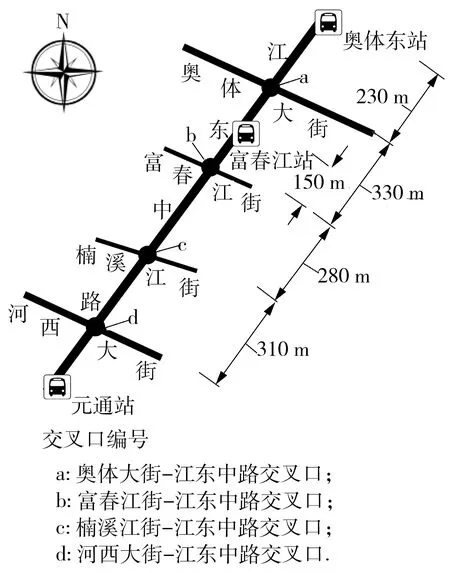
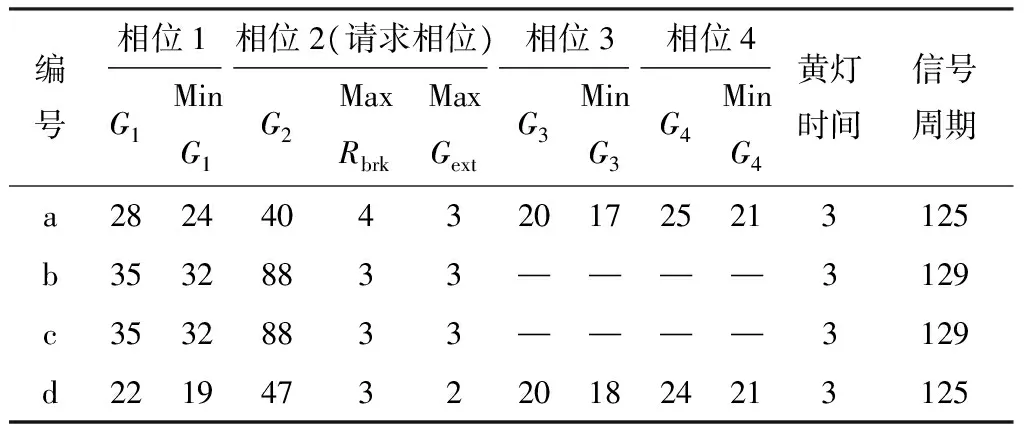
情况1 当检测器与交叉口停车线间不存在电车停靠站点且L (8) 情况2 当检测器与交叉口停车线间不存在电车停靠站点且L≥D时,检测器与交叉口停车线间的距离为L=D,即将检测器设置在上游相邻交叉口出口道附近. 情况3 当检测器与交叉口停车线间存在电车停靠站点且S (9) 检测器与交叉口停车线间的距离为 (10) 情况4 当检测器与交叉口停车线间存在电车停靠站点且L 情况5 当检测器与交叉口停车线间存在电车停靠站点且S 为验证现代有轨电车优先控制交叉口的检测器位置计算方法的有效性和可行性,结合南京市河西新城有轨电车运营资料与实地调查资料进行实例分析.样本选取奥体东站至元通站段,电车沿江东中路行驶,区间长1 200 m,涵盖奥体大街-江东中路、富春江街-江东中路、楠溪江街-江东中路和河西大街-江东中路等4个交叉口,奥体东站、富春江站和元通站等3个电车站点.各交叉口的信号配时和线路结构如图2和表2所示. 图2 奥体东站与元通站间有轨电车线路结构Fig.2 Structure of streetcar route between Olympic East Station and Yuantong Station 表2 各交叉口信号配时信息Table 2 Signal timing information of each intersection s 依据文中现代有轨电车检测器布设位置设计模型,计算a、b、c、d 4个交叉口的现代有轨电车到达检测器布设位置,结果如表3所示. 表3 各交叉口检测器位置计算结果Table 2 Calculation results of streetcar detector position at a,b,c and d intersections 根据文中计算的现代有轨电车到达检测器布设位置,以及SCATS建议的检测器布设位置,分别应用Vissim仿真软件进行运行.Vissim交通建模和非电车相位的运行延误如图3所示. 图3 Vissim交通建模和非电车相位的运行延误Fig.3 Traffic modeling in Vissim and the operation delay of non-modern-streetcar phase 检测器是现代有轨电车交叉口优先运行控制的重要基础设施,其布设位置合理与否对交叉口时空路权资源的有效利用具有重要影响. 文中根据常见的现代有轨电车信号优先控制策略及现代有轨电车运行特征,应用最优化理论建立基于车辆到达检测器位置的现代有轨电车交叉口运行效率最优模型.针对模型的有效性与实用性,应用Vissim软件对南京河西新城现代有轨电车线路的4个交叉口实施仿真检验.结果显示,文中所提方法能够有效计算出现代有轨电车到达检测器的布设位置,且对非电车相位车辆运行延误的影响也小于传统设置方法. [1] SMATLAK J,AURELIUS J,BONINA S,et al.Modern streetcar vehicle guideline [M].Washington D C:Ameri-can Public Transportation Association,2013. [2] 长江证券.现代有轨电车:城市轨交发展入新“轨” [DB/OL].[2016-04-30].https:∥max.book118.com/html/2016/0102/32540466.shtm. [3] CURRIE G,SHALABY A.Active transit signal priority for streetcars:experience in Melbourne,Australia,and Toronto,Canada [J].Transportation Research Board,2008,2042:41-49. [4] LING K,SHALABY A.A reinforcement learning approach to streetcar bunching control [J].Journal of Intelligent Transportation Systems,2005,9(2):59-68. [5] LÜCKERATH D,ULLRICH O,SPECKENMEYER E.Mode-ling time table based tram traffic [J].Journal on Deve-lopments and Trends in Modelling and Simulation,2012,22(2):61-68. [6] ULLRICH O,FRANZ S,SPECKENMEYER E,et al.Simulation and optimization of cologne’s tram schedule [J].Journal on Developments and Trends in Modelling and Simulation,2012,22(2):69-76. [7] ALAN DANAHER P E,PTOE P T P.General design and engineering principles of streetcar transit [J].Institute of Transportation Engineers,2011,81(1):38. [8] NAGATANI T.Dynamical model for retrieval of tram sche-dule [J].Physica A,2007,377:661-671. [9] NASH A.Implementing zurich’s transit priority program [J].Journal of the Transportation Research Board,2013,1835:59-65. [10] KOONCE P,RINGERT J,URBANIK T.Detection range setting methodology for sgnal priority [J].Journal of Public Transportation,2002,5(2):115-135. [11] LIU H C,SKABARDONIS A,ZHANG W B,et al.Optimal detector location for bus signal priority [J].Transportation Research Board,2004,1867:144-150. [12] ZHOU G W,GAN A,ZHU X X.Determination of optimal detector location for transit signal priority with queue jumper lanes [J].Transportation Research Board,2006,1978:123-129. [13] 严飞,李克平,孙剑.考虑倒计时的交叉口公交优先检测器布设位置研究 [J].交通信息与安全,2009,27 (6):79-83. YAN Fei,LI Ke-ping,SUN Jian.Detector location for transit signal priority at intersection with countdown signals [J].Journal of Transport Information and Safety,2009,27 (6):79-83. Supported by the Major Program of National Natural Science Foundation of China(51338003) DesignofDetectorLocationforPriorityControlofModernStreetcaratIntersection WANGBao-jie1, 2XIANGYun2WANGWei2FUMin2LIYe2 (1. School of Highway,Chang’an University , Xi’an 710064, Shaanxi, China;2. Jiangsu Key Laboratory of Urban ITS, Southeast University,Nanjing 210096, Jiangsu, China) The application of the actuated signal control at urban intersections is an important measure to ensure the advantages of modern streetcars in energy saving, environment protection, comfort and efficiency. Aiming at the problem of the installation site of vehicle arrival detectors at intersections, a design method of the detector position is proposed for the modern streetcars with priority control at intersections. First, according to the priority control strategy of the modern streetcars at intersections and their arrival time at stop lines, the situations of the modern streetcars waiting for green lights are divided into seven types, and the calculation methods for the waiting time of green lights are respectively put forward. Next, by analyzing the displacement relationships among detectors, stops and upstream adjacent intersections, a computing model for the detector position is constructed. Finally, the validity and feasibility of the proposed design method are testified by using the planning data and current traffic real-time data of Nanjing Hexi modern streetcars. The results show that the proposed design method is practical, and it has a good prospect for engineering applications. urban modern streetcar; detector; signal priority control 2016-05-26 国家自然科学基金重点资助项目(51338003),中央高校基本科研业务费专项资金资助项目(310821171006) 王宝杰(1987-),男,博士,讲师,主要从事交通运输管理研究.E-mail:wangbj2@163.com 1000-565X(2017)08-0065-05 U 491.14 10.3969/j.issn.1000-565X.2017.08.010
3 案例分析


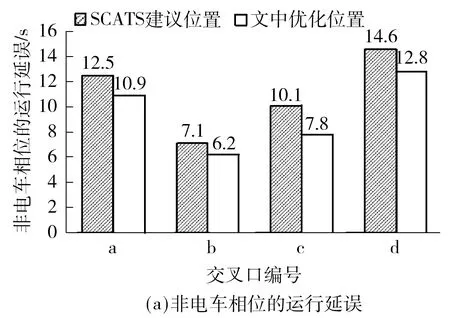
4 结语
