自动变速器驻车机构的研究
2018-01-11朱恩强
朱恩强
(北京汽车动力总成有限公司,北京 101106)
自动变速器驻车机构的研究
朱恩强
(北京汽车动力总成有限公司,北京 101106)
自动变速器的驻车机构是整个自动变速箱乃至整车系统中关系到安全的关键机构,对驻车机构的设计要求简单并且可靠,对驻车性能的要求也比较高,如对安全驻车车速、不能自动脱挡、防止意外驻车、P挡顺利拔出等方面均有要求。以某无级变速器的驻车机构为例,通过对驻车机构关键零部件(如驻车爪、驻车轮、压力块、导杆弹簧和螺旋弹簧等)的受力分析,阐明了驻车机构的设计参数与上述驻车性能之间的可量化的理论关系,为驻车机构的参数设计提供理论依据。
自动变速器;驻车机构;驻车性能;结构参数设计
0 引言
驻车机构是自动变速器中防止车辆滑行的一种安全装置,用于使汽车可靠而无时间限制地停驻在一定位置甚至斜坡上,是自动变速器中不可或缺的关键机构[1]。
自动变速器驻车机构要求能够实现以下功能:
(1)汽车以5 km/h以下车速行驶时,驻车机构能够实现安全驻车。
(2)当汽车处于非驻车工况下,发生任何异常情况,驻车机构不能自动驻车。
(3)当汽车实现驻车后,驻车机构不能自动脱挡,从而导致驻车功能失效。
(4)当汽车需要行驶时,驻车机构能够使汽车顺利摘出P挡[2]。
由于驻车机构在自动变速器中的重要作用,驻车机构的设计、分析、计算等具有重要意义。但从现有文献及资料中发现,这方面的研究较为欠缺,自动变速器设计中各参数很大程度上也是以对标为主,对驻车机构各零部件参数的设计缺少细致的分析计算。文中以无级变速器的驻车机构为例,对驻车机构各零部件结构形式、相互之间的传动关系、作用力等进行分析,从而得出各零部件的结构参数对上述4条驻车功能的影响,以求为驻车机构的设计提供可量化的理论依据。
1 驻车机构结构形式分析
自动变速器的驻车机构设计一般要求简单可靠,文中讨论的无级变速器的驻车机构主要包括换挡摇臂、凸轮板、叶片弹簧、驻车导杆总成(驻车导杆、导杆弹簧、压力块等)、压力导向块、螺旋弹簧、驻车爪及驻车轮等。根据总布置的匹配和布置空间要求,具体结构如图1所示。
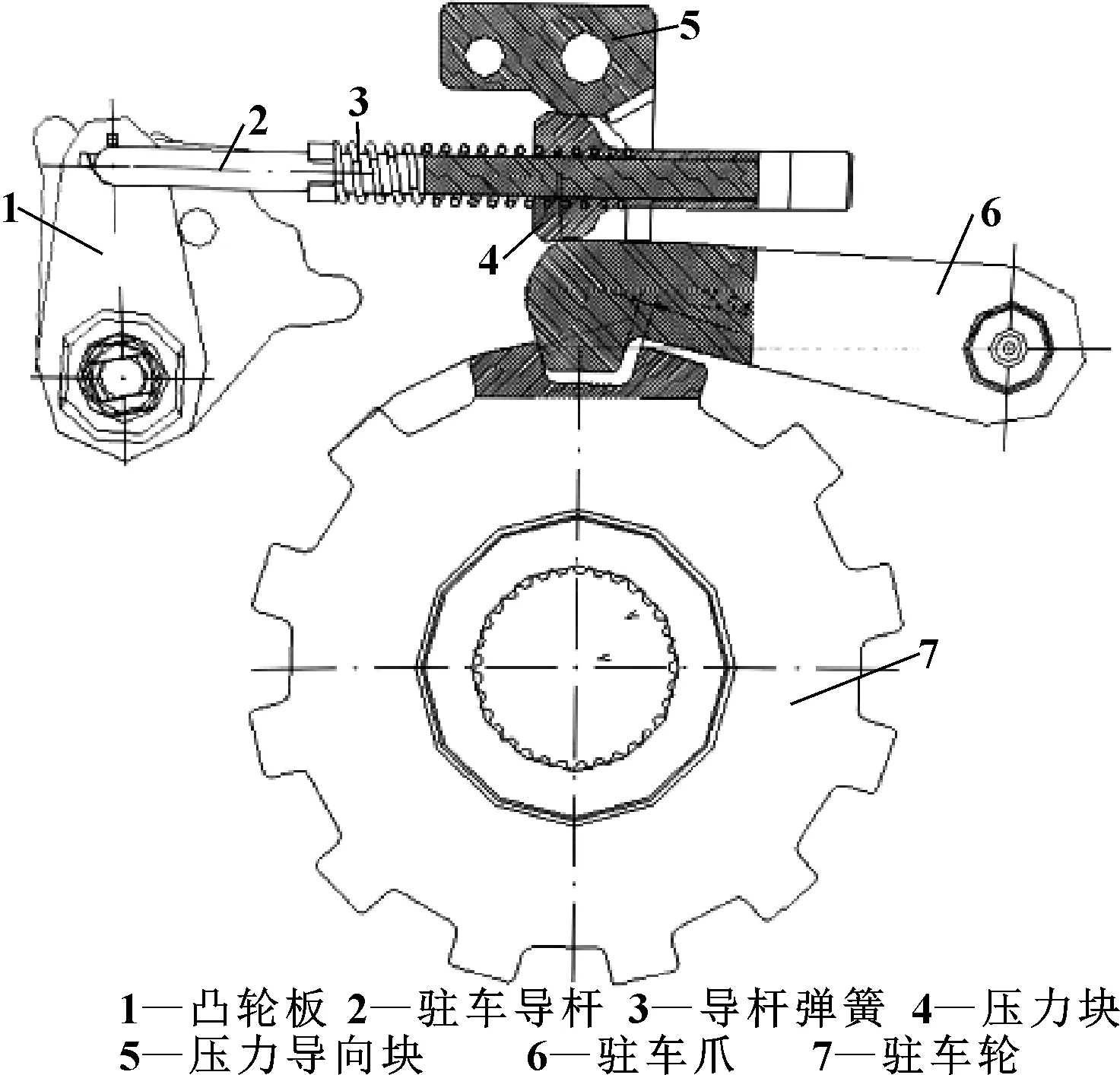
图1 驻车机构结构示意图
2 坡道驻车静态分析
根据驻车机构的工作原理,汽车坡道驻车时,对驻车机构的分析需要从上坡和下坡两种情况进行分析,因为在上坡和下坡情况下驻车爪和驻车轮的接触面不同,从而各零部件受力的具体数值也不同,但分析方法是一致的,因此文中主要分析上坡情况下的坡道驻车,下坡情况可以用相同的方法分析。汽车上坡时驻车机构的受力情况如图2所示,以驻车轮中心与驻车爪回转轴(Pivot Pin)的中心连线作为X轴,以驻车爪回转轴中心为原点建立坐标系,对驻车机构主要零部件进行分析。
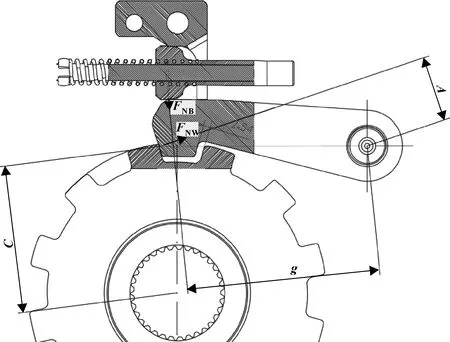
图2 上坡时驻车机构各零部件的受力分析
驻车状态下各零部件处于受力平衡状态,则各零件受力分析如下文所示。
2.1 驻车轮
以驻车轮为研究对象进行受力分析,驻车轮受力为:
(1)输出轴顺时针的力矩Tshaft,该力矩试图让驻车轮顺时针旋转,即在坡道上,由于车身的重力产生的使汽车下滑的力矩;
(2)驻车爪对输出轴的逆时针力矩TNW,该力矩阻止驻车轮顺时针旋转,从而起到驻车的作用。
驻车轮受力平衡,则:
Tshaft=TNW=FNW×C×i
(1)
其中:FNW为驻车轮对驻车爪在接触面上的正压力;C为FNW对驻车轮中心的力臂(通过数模模拟装配后测量所得);i为半轴齿轮到安装驻车轮的轴(中间轴)的传动比。
2.2 驻车爪
由图2可知驻车爪受到的力矩为:驻车轮对驻车爪的顺时针力矩TNW,压力块对驻车爪的逆时针力矩TNB。
驻车爪的受力为:驻车轮在接触面的压力FNW、压力块在接触面的压力FNB及驻车爪回转轴(Pivot Pin)对驻车爪的支撑力FPP。
驻车爪受力平衡,则:
TNW=FNW×A=TNB=FNB×g
(2)
其中:A和g分别为FNW和FNB相对驻车爪旋转中心的力臂长度。
2.3 驻车导杆总成
以驻车导杆总成为研究对象,由图3可知,驻车导杆总成受力为:驻车爪和压力导向块对压力块的压力FNB、驻车爪与压力导向块对压力块的摩擦力FFB、凸轮板对驻车导杆总成的作用力FPULLOUT3个部分组成,由图中可以看出压力块两侧的受力对称,所以在σ方向上两侧受力抵消,τ方向上受力是单侧受力的两倍则:
FFB=FNB×μ
(3)
压力FNB与摩擦力FFB在τ方向上的分力:
FNBτ=FNB×sinφ
(4)
FFBτ=FFB×cosφ
(5)
其中:φ为压力块的锥面角度;μ为压力块与驻车爪和压力导向块之间的摩擦因数。

图3 驻车导杆总成受力分析
2.4 驻车压力块
以压力块为研究对象,由图4可知,压力块受力平衡,则:
2FFBτ-2FNBτ+FSpring=0
(6)

图4 压力块受力分析
3 影响驻车性能的参数研究
3.1 驻车压力块锥面角度
驻车压力块的锥面角度在驻车机构设计中是一个关键的参数,直接影响坡道驻车时的P挡拔出力和坡道驻车的可靠性。
3.1.1 驻车防止自动脱挡能力
根据驻车性能可靠性要求,当汽车驻车后,驻车机构不能自动脱挡,而使驻车功能失效。根据上述对驻车机构压力块的受力分析可知,坡道驻车工况下,为使压力块不自动脱出,根据式(6)可知应满足以下条件:
2FFBτ+FSpring≥2FNBτ
(7)
结合公式(5)—(7)可得:
林昏晓踌躇了一下,突然神秘兮兮地说:“那我给你取一个吧?我叫林昏晓,你呢,干脆当我妹妹算了,叫林夕晓。”
(8)
式(8)中:FSpring为安装状态下压缩弹簧的力值,即弹簧的设计值;FNB可通过式(1)、式(2)联立求解。
3.1.2 P挡摘出力
根据第2.3节中对驻车导杆总成的受力分析可知,摘出P挡所需的力值为:
FPULLOUT≥2FNB×(μcosφ-sinφ)
(9)
3.1.3 压力块锥面角度
根据第2.2、2.3节的分析可知,驻车压力块锥面角度的选择应兼顾驻车可靠性和P挡摘出力:不应太大,导致驻车可靠性下降,存在自动脱挡的危险;也不应太小,导致P挡摘出力过大而拔不出来。
3.2 回位弹簧的扭矩值
驻车机构回位弹簧的作用是防止非驻车状态下,因汽车的颠簸、加减速及驻车爪自身重力等原因使驻车爪与驻车轮意外啮合,从而对汽车零部件造成损毁。
非驻车状态下驻车爪受力为:螺旋弹簧的扭转力矩TTSpring、重力产生的扭矩TW以及车辆加速产生的扭矩Ta。
驻车爪受力平衡,则:
TTSpring-TW-Ta=0
(10)
TW=mP×g×RG
(11)
Ta=mP×a×RG
(12)
其中:mP为驻车爪的质量;a为变速箱的加速度;RG为驻车爪质心距驻车爪回转轴(Pivot Pin)中心的距离,即力臂。
由式(10)—(12)可知:已知回位弹簧的扭矩值可以得到变速箱的最大加速度从而得出车辆的最大加速度,也可以根据车辆的最大加速度来设计扭转弹簧的扭矩参数。
3.3 安全驻车车速
在车速不大于5 km/h的工况下,要求能够实现安全的驻车功能。
实现这一功能的前提是:驻车爪从进入驻车轮两齿之间的齿槽开始计算,到下一刻驻车轮与驻车爪接触之前的时间t内,压力块与驻车爪的接触点应该已经进入自锁区域,才能使驻车爪成功与驻车轮啮合而不会脱挡。
根据这个思想,假设导杆弹簧在该过程中对压力块的作用力为FS,压力块与驻车爪之间的相互作用力为FN,驻车机构从图5(a)运行到图5(b)的状态所用时间为t,时间段t内,驻车爪转过角度WP,驻车轮转过角度WL,驻车压力块运动位移为sB,则:
(13)
(14)
FN×RP+TW-TTSpring=JP×aP
(15)
(16)
FSpring-FNτ=mB×aB
(17)
其中:WL可以从图5(a)、(b)测量得到;ωL为驻车轮的转速,可以根据车速计算得到;aP为此过程中驻车爪旋转的角加速度;RP为FN相对于驻车爪回转中心的力臂;JP为驻车爪的转动惯量;aB为驻车压力块在此过程中的加速度;mB为压力块的质量;FSpring为导杆弹簧的推力。则根据以上公式及要求的安全驻车车速可以推导出整个过程中弹簧的压缩量及弹簧力来作为弹簧参数的设计参考。

图5 驻入过程示意图
4 应用实例
以该无级变速器为例,应用上述方法对设计过程中遇到的问题进行分析和解决。
4.1 问题描述
根据驻车功能性要求,需对变速箱的驻车机构坡道驻车、驻车系统平路冲击强度进行评价。通过坡道驻车耐久试验对驻车机构的耐久强度、坡道P挡摘除力等性能参数进行评价。
问题:在坡道耐久试验过程中出现了满载30%坡道无法摘除P挡的问题(满足条件的判定标准为100 N以下),这个问题对于自动挡的车来说,在坡道上是很危险的。
4.2 问题分析
根据第4节对P挡摘除力的分析,通过式(9)可知,影响驻车力的主要因素为:驻车轮对驻车爪的正压力FNB、压力块与驻车轮及压力导向块之间的摩擦因数μ以及压力块锥面角度φ。
根据式(1)—(2)的分析,FNB主要取决于整车的整备质量以及驻车爪和驻车轮的尺寸参数等,整车整备质量涉及因素多,驻车爪和驻车轮的更改会影响到模具的变更;μ的大小主要取决于压力块、驻车爪以及压力导向块的加工工艺和加工精度,由公式(9)可知,若想减小P挡摘除力,需要减小μ值,而提高加工精度,会增加零件的成本,且粗糙度μ的值探测度低,不好控制;压力块锥面的角度φ为机加工所得,更改方便,亦不会增加成本。
综合以上因素,更改压力块角度φ,更改前φ=5°,μ=0.2,i=4.99,整备质量为1 973 kg,轮胎滚动半径为0.295 m,30%坡道上,可得Tshaft=mg×sin(arctan(30/100))×r=1 973×9.8×0.287×0.295=1 637 N·m。结合式(1)—(2)可得FNB=1 584.5 N。代入公式(9)得出FPULLOUT=2×FNB×(μcosφ-sinφ)=2×1 584.5×(0.2×cos5°-sin5°)=355 N,根据换挡手柄到换挡轴的杠杆比,换算后得到换挡手柄的P挡摘除力为103.8 N,超出了规定的范围值(<100 N)。更改压力块锥面角度φ=6°,采用上述方法计算得P挡摘除力为90 N,满足要求。更改完成后,进行驻车性能试验验证通过,问题解决。
5 结束语
对自动变速器驻车机构各零部件的受力进行了分析,对驻车机构中几个主要零部件的受力进行分析,从而得出驻车机构中主要的设计参数对驻车机构性能,包括安全的驻车车速、防止意外驻车、防止自动脱挡、P挡摘出力等主要性能指标的影响,通过这些分析得到的结论,可以为驻车机构主要零部件的参数设计提供理论依据和参考。文中虽然是以某个无级变速器为例进行研究,但研究方法可以推广到目前大部分自动变速器驻车机构的设计计算中去,甚至包括一些电子驻车机构。
[1]刘惟信.汽车设计[M].北京:清华大学出版社,2001.
[2]陈华,陈辛波,傅灵玲,等.自动变速器驻车机构性能分析与研究[J].拖拉机与农用运输车,2014,41(4):24-26.
CHEN H,CHEN X B,FU L L,et al.Performance Study of Parking Mechanism of Auto Transmission[J].Tractor & Farm Transporter,2014,41(4):24-26.
[3]赵进,梅自元,邓小梅.双离合变速器驻车锁止机构原理与试验研究[J].江西化工,2016(4):127-129.
ZHAO J,MEI Z Y,DENG X M.Principle and Test Research of Dual Clutch Transmission Park Lock System[J].Jiangxi Chemical Industry,2016(4):127-129.
[4]林小凤.基于ADAMS的某双离合变速器驻车机构仿真分析[J].企业技术开发,2015,34(30):64-65.
ResearchontheParkingMechanisminAutomaticTransmission
ZHU Enqiang
(BAIC Powertrain Co.,Ltd.,Beijing 101106,China)
Parking mechanism is a key part in AT even in vehicle,technology requirement for parking mechanism is simple and reliable, such as parking speed should be safe, can not automatically escape, accidental parking should be avoided, P gear should be pulled out with a proper torque and so on are required. A parking mechanism of a CVT was taken as an example.Through analyzing load conditions of the parking mechanism key components (such as parking claws, wheel, pressure block, guide spring and coil spring etc.), the quantitative relationship between the design parameters of the parking mechanism and the parking performance was clarified.It provides theoretical basis for the design of the parking mechanism.
Automatic transmission;Parking mechanism;Parking performance;Structural parameter design
2017-08-02
朱恩强,男,硕士,专业方向为汽车设计、机械设计。E-mail:zhu_enqiang@126.com。
10.19466/j.cnki.1674-1986.2017.12.005
U46
B
1674-1986(2017)12-019-04